You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- B30C TransmissionDocument65 pagesB30C Transmissionwtn2013100% (9)
- MID 130 Volvo Gear Box Fault CodesDocument9 pagesMID 130 Volvo Gear Box Fault CodesMechanical Engg86% (7)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 16 20 041 0R - Manual - 6W105S - EN - Aug2016 PDFDocument143 pages16 20 041 0R - Manual - 6W105S - EN - Aug2016 PDFErick Brante100% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 2006 HD Model - Year - Technical - ForumDocument108 pages2006 HD Model - Year - Technical - ForumHOWARDB2010100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Powertrain: Special Maserati 3200 GT Manuals For SaleDocument37 pagesPowertrain: Special Maserati 3200 GT Manuals For SaleGamerz Nutak100% (1)
- Siemens Gas Turbine For Mechanical Drive SGT-400Document4 pagesSiemens Gas Turbine For Mechanical Drive SGT-400darh90No ratings yet
- ZF - Ergopower Transmission: Order-No.: 5872 194 002Document53 pagesZF - Ergopower Transmission: Order-No.: 5872 194 002Gustavo Belgrano95% (19)
- 2009-12-10 025739 Mercedes 722 5 Trans PDFDocument5 pages2009-12-10 025739 Mercedes 722 5 Trans PDFjuanNo ratings yet
- Automobile Engg QuestionsDocument7 pagesAutomobile Engg QuestionssonawanepmsNo ratings yet
- Function Description Operation: G5X Operating and Maintenance Manual Main ShaftDocument7 pagesFunction Description Operation: G5X Operating and Maintenance Manual Main ShaftIbraHim RaGabNo ratings yet
- SSS Clutch Operating Principles PDFDocument4 pagesSSS Clutch Operating Principles PDFferayi100% (3)
- VA40 (Ab7)Document6 pagesVA40 (Ab7)Smiti TarekNo ratings yet
- Power System Instability-What Relay Engineers Need To KnowDocument8 pagesPower System Instability-What Relay Engineers Need To KnowFlo MircaNo ratings yet
- Manitou MLT 740h LsuDocument14 pagesManitou MLT 740h LsuCalin SilviuNo ratings yet
- N3 MechanotechnologyDocument54 pagesN3 MechanotechnologyAshly86% (7)
- Geosynthetic Clay LinersDocument21 pagesGeosynthetic Clay LinersAman SahadeoNo ratings yet
- Vertical Roller Mills FLSMidthDocument11 pagesVertical Roller Mills FLSMidththach pha thienNo ratings yet
- Friction GuidewaysDocument13 pagesFriction Guidewaysyummit100% (1)
- I.s.en771 6 2005+na 2010Document9 pagesI.s.en771 6 2005+na 2010Aman SahadeoNo ratings yet
- Rendering A Practical Handbook PDFDocument21 pagesRendering A Practical Handbook PDFAman Sahadeo100% (1)
- ATACHMENT (Elme)Document184 pagesATACHMENT (Elme)gsr100% (2)
- Applied Clay Mineralogy Today and TommorowDocument11 pagesApplied Clay Mineralogy Today and TommorowAman SahadeoNo ratings yet
- EducationDocument29 pagesEducationAman SahadeoNo ratings yet
- Testing of Concrete BlocksDocument6 pagesTesting of Concrete BlocksMarie Fe BermidoNo ratings yet
- MasonryDocument1 pageMasonryAman Sahadeo100% (1)
- ﺔﻠﺠﻣ مﻮﻠﻌﻟا ﺔﺜﺤﺒﻟا و ﺔﻴﻘﻴﺒﻄﺘﻟا Estimation Compression Strength of Concrete Made from Local Material Using Non-destructive TestsDocument5 pagesﺔﻠﺠﻣ مﻮﻠﻌﻟا ﺔﺜﺤﺒﻟا و ﺔﻴﻘﻴﺒﻄﺘﻟا Estimation Compression Strength of Concrete Made from Local Material Using Non-destructive TestsAman SahadeoNo ratings yet
- SpecificationsDocument41 pagesSpecificationsAman SahadeoNo ratings yet
- CuringDocument7 pagesCuringAman SahadeoNo ratings yet
- 2004 07 ConcentrateDocument4 pages2004 07 ConcentrateAman SahadeoNo ratings yet
- Specifying Low Drying Shrinkage Crack Control: Queensland University Insitu and Standard Shrinkage ResultsDocument1 pageSpecifying Low Drying Shrinkage Crack Control: Queensland University Insitu and Standard Shrinkage ResultsAman SahadeoNo ratings yet
- Reference For Limit On Aggregates PDFDocument3 pagesReference For Limit On Aggregates PDFAman SahadeoNo ratings yet
- 9IMC - en 1015-11 and en 1015-12 Proposal Updating For Lime ProductsDocument9 pages9IMC - en 1015-11 and en 1015-12 Proposal Updating For Lime ProductsHasan Ayouby100% (1)
- Concrete Myth 1Document3 pagesConcrete Myth 1Batepola BacNo ratings yet
- Sikamonotop 612Document3 pagesSikamonotop 612Aman SahadeoNo ratings yet
- How To Identify Evaluate RepairDocument5 pagesHow To Identify Evaluate RepairGabby Fadil YolNo ratings yet
- 1 s2.0 S0008884615001040 MainDocument10 pages1 s2.0 S0008884615001040 MainAman SahadeoNo ratings yet
- ParsonsDocument18 pagesParsonsAman SahadeoNo ratings yet
- Research Review of Cement Clinker ChemistryDocument14 pagesResearch Review of Cement Clinker ChemistryAman SahadeoNo ratings yet
- Slump LossDocument4 pagesSlump LossAman SahadeoNo ratings yet
- Gullerud 2002Document168 pagesGullerud 2002Aman SahadeoNo ratings yet
- Effect of High Levels of Fines Content On Concrete PropertiesDocument10 pagesEffect of High Levels of Fines Content On Concrete PropertiesAman Sahadeo100% (1)
- Evaluation of Clay Samples For Suitability For Extrusion and Production of REBsDocument13 pagesEvaluation of Clay Samples For Suitability For Extrusion and Production of REBsAman SahadeoNo ratings yet
- Application of Fe3 Modified Bentonite Clays For Groundwater DefluoridationDocument0 pagesApplication of Fe3 Modified Bentonite Clays For Groundwater DefluoridationAman SahadeoNo ratings yet
- Current Research Thrusts Into Clays and Clay Minerals in AfricaDocument0 pagesCurrent Research Thrusts Into Clays and Clay Minerals in AfricaAman SahadeoNo ratings yet
- Consolidation AnalogyDocument1 pageConsolidation AnalogyAman SahadeoNo ratings yet
- Bearing Capacity Shear WaveDocument17 pagesBearing Capacity Shear WaveMaan GalangNo ratings yet
- FinesDocument116 pagesFinesAman SahadeoNo ratings yet
- ADF Health Manual Vol 20, Part8, Chp2Document18 pagesADF Health Manual Vol 20, Part8, Chp2Ahmad Usman Tahir100% (2)
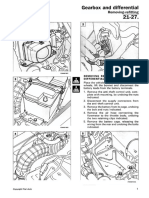
- Fiat Barchetta: and DifferentialDocument6 pagesFiat Barchetta: and DifferentialHallex OliveiraNo ratings yet
- ZF 4 WG-310Document28 pagesZF 4 WG-310DarioNo ratings yet
- SP75Y EnglishDocument2 pagesSP75Y EnglishGarcia CruzNo ratings yet
- Dana dsh40 3 25 Parts ManualDocument36 pagesDana dsh40 3 25 Parts ManualOswaldo PalaciosNo ratings yet
- Belts Right-HandDocument2 pagesBelts Right-HandValentinNo ratings yet
- Underground Mining LoaderDocument20 pagesUnderground Mining LoaderMisael Josue Castro HuancayoNo ratings yet
- Catalogo GeralDocument12 pagesCatalogo GeralAnderson De Souza JesusNo ratings yet
- CSY-TAM-0096-12E Data Sheet & Curve Rev01 Efecto Placo OrificioDocument3 pagesCSY-TAM-0096-12E Data Sheet & Curve Rev01 Efecto Placo Orificioaldoacss_148400122No ratings yet
- FT-60 DmaDocument153 pagesFT-60 Dmasaravananknpc100% (1)
- HaleyDocument28 pagesHaleyOrlando EsquivelNo ratings yet
- Manual Cyclone 150Document40 pagesManual Cyclone 150Franco Sarfati83% (6)
- 412 MM CH12Document28 pages412 MM CH12Hugo GonzalezNo ratings yet