You might also like
- The K FactorDocument11 pagesThe K FactorSOURAV PRASADNo ratings yet
- AS3842Document10 pagesAS3842kik020No ratings yet
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- An920 Rev2Document38 pagesAn920 Rev2glamuraNo ratings yet
- 1 BJTDiffPairLabDocument11 pages1 BJTDiffPairLaburim11No ratings yet
- Chris Basso APEC Seminar 2021Document128 pagesChris Basso APEC Seminar 2021sabinebachNo ratings yet
- Power Amplifier Linearization Using Singular Value Decomposition AlgorithmDocument4 pagesPower Amplifier Linearization Using Singular Value Decomposition AlgorithmEditor IJRITCCNo ratings yet
- Loop Gain MeasurementDocument7 pagesLoop Gain MeasurementgubiliNo ratings yet
- DC-DC Converters Feedback and ControlDocument220 pagesDC-DC Converters Feedback and ControlNguyên NghĩaNo ratings yet
- Implementing PID Controllers on Motorola DSP56000/DSP56001Document84 pagesImplementing PID Controllers on Motorola DSP56000/DSP56001vydeoNo ratings yet
- Three Stage Battery Charge SLA PDFDocument18 pagesThree Stage Battery Charge SLA PDFzigoto_2n0% (1)
- An Improved SEPIC Converter TopologyDocument35 pagesAn Improved SEPIC Converter TopologyDileep GNo ratings yet
- Single Precision Floating Point ALU: Prof. Vidya Dahake, Prof. Mithilesh MahendraDocument4 pagesSingle Precision Floating Point ALU: Prof. Vidya Dahake, Prof. Mithilesh MahendraLê Xuân HiếuNo ratings yet
- DSPDocument190 pagesDSPMallikarjun AralimaradNo ratings yet
- Synthesis of Area Optimized 64 Bit Double Precision Floating Point Multiplier Using VHDLDocument4 pagesSynthesis of Area Optimized 64 Bit Double Precision Floating Point Multiplier Using VHDLerpublicationNo ratings yet
- Design and Implementation of Fast Floating Point Multiplier UnitDocument5 pagesDesign and Implementation of Fast Floating Point Multiplier UnitSanthoshReddyNo ratings yet
- Steber An LMS Impedance BridgeDocument7 pagesSteber An LMS Impedance BridgebigpriapNo ratings yet
- AsmDocument156 pagesAsmSaulencoNo ratings yet
- Micro InterfacingDocument15 pagesMicro InterfacingDeepesh KhanejaNo ratings yet
- Fix Point Implementation of Elementry FunctionsDocument134 pagesFix Point Implementation of Elementry FunctionsmukulkabraNo ratings yet
- I2C Bus Specifications for CMS Tracker 2S & PS ModulesDocument13 pagesI2C Bus Specifications for CMS Tracker 2S & PS ModulesGasthim KiranNo ratings yet
- I2C Protocol Design For ReusabilityDocument8 pagesI2C Protocol Design For ReusabilityAkshay KashyapNo ratings yet
- Using The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDocument14 pagesUsing The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDario Darius100% (2)
- Diodes Inc - Library - Components - List PDFDocument5 pagesDiodes Inc - Library - Components - List PDFLuciaNo ratings yet
- Xyce Reference GuideDocument634 pagesXyce Reference GuideVojislav MedićNo ratings yet
- RS232 Communication With PIC MicrocontrollerDocument5 pagesRS232 Communication With PIC Microcontrollerhidad56195No ratings yet
- Architecture and Design of Generic IEEE-754 Based Floating Point Adder, Subtractor and MultiplierDocument5 pagesArchitecture and Design of Generic IEEE-754 Based Floating Point Adder, Subtractor and MultiplierEditor IJRITCCNo ratings yet
- Order and Rate Constant of a ReactionDocument4 pagesOrder and Rate Constant of a ReactionAbdul RehmanNo ratings yet
- Instruction Manual: Digital MultimeterDocument269 pagesInstruction Manual: Digital MultimeterAntonio CarlosNo ratings yet
- Li-Baker DetectorDocument32 pagesLi-Baker Detectorapi-397061932No ratings yet
- M68 HC 05Document332 pagesM68 HC 05rullitoNo ratings yet
- A Beginner's Guide To TIG WeldingDocument5 pagesA Beginner's Guide To TIG WeldingKalaimugilan ArunNo ratings yet
- Characterization of Au (OH) 3Document6 pagesCharacterization of Au (OH) 3Nguyen TrangNo ratings yet
- I2c ProgramDocument2 pagesI2c Programarunan55No ratings yet
- Introduction To Verilog HDLDocument38 pagesIntroduction To Verilog HDLYeshoda MallikarjunaNo ratings yet
- A Low-Cost Impedance Meter Using a PC Sound CardDocument4 pagesA Low-Cost Impedance Meter Using a PC Sound Carddavorko_tNo ratings yet
- ENGR 451 Lab 2 BJT Differential PairDocument9 pagesENGR 451 Lab 2 BJT Differential PairdgretchenNo ratings yet
- Free CADDocument19 pagesFree CADKent PawarNo ratings yet
- 3.1.1.1 Video Demonstration - BIOS - UEFI MenusDocument2 pages3.1.1.1 Video Demonstration - BIOS - UEFI Menusillus fitriyahNo ratings yet
- Micro Controller Lab Manual (06ESL47)Document67 pagesMicro Controller Lab Manual (06ESL47)aamreen818No ratings yet
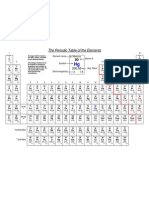
- Ed Periodic TableDocument1 pageEd Periodic Tablechrissy_chinNo ratings yet
- The Best of Bob PeaseDocument338 pagesThe Best of Bob PeaseCARROUCHO62No ratings yet
- What is UEFI? How to Determine if Your PC Uses UEFI or BIOS (39Document2 pagesWhat is UEFI? How to Determine if Your PC Uses UEFI or BIOS (39Vineeth NandanamNo ratings yet
- An Implementation of I2C Slave Interface Using Verilog HDL: JournalDocument6 pagesAn Implementation of I2C Slave Interface Using Verilog HDL: Journalvisu100% (1)
- I2C Bus Overview - The Inter-Integrated Circuit Communication ProtocolDocument19 pagesI2C Bus Overview - The Inter-Integrated Circuit Communication ProtocolMohamed Ali100% (3)
- A Low Budget Vector Network Analyser For AF To UHFDocument9 pagesA Low Budget Vector Network Analyser For AF To UHFgrezmosNo ratings yet
- IEEE 754 ConverterDocument2 pagesIEEE 754 ConverterAnggara KusumaNo ratings yet
- I2C TutorialDocument4 pagesI2C TutorialDeepak Reddy100% (2)
- Discrete Numerical Methods in Physics and EngineeringFrom EverandDiscrete Numerical Methods in Physics and EngineeringRating: 4 out of 5 stars4/5 (2)
- I2c Serial ProtocolDocument9 pagesI2c Serial ProtocolShardul Deolankar100% (2)
- Introduction To VerilogDocument88 pagesIntroduction To Verilogmaster vijayNo ratings yet
- IEEE 754 Floating Point NotesDocument4 pagesIEEE 754 Floating Point NotesNathaniel R. ReindlNo ratings yet
- PIC Assembly Language For The Complete BeginnerDocument35 pagesPIC Assembly Language For The Complete BeginnerVlad Ioan Cirlogea100% (2)
- Chapter Two Differential Amplifiers 2nd LectureDocument35 pagesChapter Two Differential Amplifiers 2nd LectureTemesgen MekonenNo ratings yet
- Getting Started Free CadDocument13 pagesGetting Started Free CadproftononNo ratings yet
- Operational Amplifier FundamentalsDocument98 pagesOperational Amplifier FundamentalsDiptiNo ratings yet
- Solution Processed Metal Oxide Thin Films for Electronic ApplicationsFrom EverandSolution Processed Metal Oxide Thin Films for Electronic ApplicationsNo ratings yet
- Feedback in AmplifierDocument13 pagesFeedback in Amplifierkaran007_mNo ratings yet
- 100W Dock For Ipod/Iphone Mini Hi-Fi System: Fwm200DDocument19 pages100W Dock For Ipod/Iphone Mini Hi-Fi System: Fwm200DEmericLebratNo ratings yet
- "Rules of The Road" For High-Speed Differential ADC DriversDocument11 pages"Rules of The Road" For High-Speed Differential ADC Driversi512113143348No ratings yet
- Gibson Dark Fire Owner's ManualDocument39 pagesGibson Dark Fire Owner's ManualSamuel David CastilloTorresNo ratings yet
- Stepping Motor Control AmplifierDocument21 pagesStepping Motor Control AmplifiersmallbarshalomNo ratings yet
- BehringerNU4-6000 Power Amp Manual PDFDocument4 pagesBehringerNU4-6000 Power Amp Manual PDFpmacs10No ratings yet
- La 9241Document21 pagesLa 9241Rosalia QuirozNo ratings yet
- Frequency Division Multiplexing/ Demultiplexing Trainer: MODEL-COM128Document15 pagesFrequency Division Multiplexing/ Demultiplexing Trainer: MODEL-COM128hvtspktNo ratings yet
- Hearing Aid PDFDocument43 pagesHearing Aid PDFBILAL DIFNo ratings yet
- Features & Benefits Description: Product Name Product Type Marking Ordering Code PackageDocument20 pagesFeatures & Benefits Description: Product Name Product Type Marking Ordering Code PackageFurkan Berk KayaNo ratings yet
- Class D Tda8954Document46 pagesClass D Tda8954rayafellowsjrNo ratings yet
- 5 A 5Document13 pages5 A 5ElectromateNo ratings yet
- WMSS Documentation FullDocument79 pagesWMSS Documentation FullSiva AjayNo ratings yet
- Powerwave RepeatersDocument17 pagesPowerwave RepeatersRiznanz0% (1)
- Data SheetDocument1 pageData SheetWalter Daniel Moran Alarcon0% (1)
- EricssoEricsson WCDMA 2100MHz RRU, 40W KRC161 134/4 Model RRU22 21IV40n RRU22 PDFDocument5 pagesEricssoEricsson WCDMA 2100MHz RRU, 40W KRC161 134/4 Model RRU22 21IV40n RRU22 PDFNick Wencil0% (1)
- EVID 12.1P User ManualDocument16 pagesEVID 12.1P User ManualMichaelMoodyNo ratings yet
- Module: Introduction To Solid State Physics and ElectronicsDocument7 pagesModule: Introduction To Solid State Physics and Electronicsnahom teferaNo ratings yet
- BUET Admission Test Study MaterialsDocument3 pagesBUET Admission Test Study MaterialsShahriar RumiNo ratings yet
- Cosimat N+ PDFDocument38 pagesCosimat N+ PDFmass72No ratings yet
- Flex Max FM331-LE 1 GHZ Line Extender Amplifier Data SheetDocument5 pagesFlex Max FM331-LE 1 GHZ Line Extender Amplifier Data SheetJustin OlssonNo ratings yet
- ECE Pre-PhD Courses Research MethodologyDocument17 pagesECE Pre-PhD Courses Research MethodologyvasagirisureshNo ratings yet
- Tube Grid Dip MeterDocument4 pagesTube Grid Dip MeterDiego García Medina100% (1)
- E85005-0127 - Auxiliary Power SupplyDocument4 pagesE85005-0127 - Auxiliary Power SupplyCoordinador TecnicoNo ratings yet
- Am & FM TransmittersDocument64 pagesAm & FM Transmittersbaburao_kodavati100% (2)
- RTN 600 ODU Hardware Description (V100 - 06)Document100 pagesRTN 600 ODU Hardware Description (V100 - 06)Noman Sarwar100% (2)
- K&H KL-720K&H KL-720.Document6 pagesK&H KL-720K&H KL-720.Gabriel SarmientoNo ratings yet
- IEC App NoteAN 41 - IEC61000-4-3 Ed3 UpdateDocument8 pagesIEC App NoteAN 41 - IEC61000-4-3 Ed3 UpdatezonetrekNo ratings yet
- 2009-Fundamentals of Eeg Technology-IvesDocument44 pages2009-Fundamentals of Eeg Technology-IvesJesus PeñaNo ratings yet
- Ic 5555Document54 pagesIc 5555Ross RodriguezNo ratings yet
- 90.25720 GDC Far 5.10 - 2 O&m ManualDocument315 pages90.25720 GDC Far 5.10 - 2 O&m Manualkrishna bhanu singh100% (7)