You might also like
- Panchali SabathamDocument84 pagesPanchali SabathamThiyagarajan SankaranNo ratings yet
- Bharathi - Kannan Pattu, Kuyil PattuDocument57 pagesBharathi - Kannan Pattu, Kuyil Pattuapi-3801313No ratings yet
- Barathiyin PaadalgalDocument56 pagesBarathiyin PaadalgalSandhana XaviourNo ratings yet
- Selecting An Artificial Neural Network For Efficient Modeling and Accurate Simulation of The Milling ProcessDocument12 pagesSelecting An Artificial Neural Network For Efficient Modeling and Accurate Simulation of The Milling ProcessДраган РодићNo ratings yet
- Optimization of The Core Configuration Design Using A HybridDocument14 pagesOptimization of The Core Configuration Design Using A HybridvaalgatamilramNo ratings yet
- Namakkal Kavignar SongsDocument112 pagesNamakkal Kavignar Songsvaalgatamilram100% (1)
- Thirukural (TamilEnglish)Document167 pagesThirukural (TamilEnglish)arunprasad.vit100% (5)
- Surface Roughness Prediction in Machining of Cast PolyamideDocument6 pagesSurface Roughness Prediction in Machining of Cast PolyamidevaalgatamilramNo ratings yet
- கருவாச்சி காவியம்Document289 pagesகருவாச்சி காவியம்Arulraj95% (19)
- Wear Response Prediction of TiO2-Polyester CompositesDocument6 pagesWear Response Prediction of TiO2-Polyester CompositesvaalgatamilramNo ratings yet
- Using Artificial Neural Networks To Predict The FatigueDocument13 pagesUsing Artificial Neural Networks To Predict The FatiguevaalgatamilramNo ratings yet
- Predicting The Fatigue Life of Different CompositeDocument14 pagesPredicting The Fatigue Life of Different CompositevaalgatamilramNo ratings yet
- Development of Prediction Model For Mechanical Properties of Batch Annealed Thin SteelDocument6 pagesDevelopment of Prediction Model For Mechanical Properties of Batch Annealed Thin SteelvaalgatamilramNo ratings yet
- Intelligent Hybrid System For Integration in Design and ManufactureDocument6 pagesIntelligent Hybrid System For Integration in Design and ManufacturevaalgatamilramNo ratings yet
- Predicting The Crushing Behavior of Axially LoadedDocument13 pagesPredicting The Crushing Behavior of Axially LoadedvaalgatamilramNo ratings yet
- Artificial Neural Network As An Incremental Non-LinearDocument19 pagesArtificial Neural Network As An Incremental Non-LinearvaalgatamilramNo ratings yet
- Modelling of The Cutting Tool Stresses in Machining of Inconel 718 UsingDocument13 pagesModelling of The Cutting Tool Stresses in Machining of Inconel 718 UsingvaalgatamilramNo ratings yet
- Intelligent Computing Methods For Manufacturing SystemsDocument24 pagesIntelligent Computing Methods For Manufacturing SystemsvaalgatamilramNo ratings yet
- Artificial Neural Networks For Machining Processes SurfaceDocument24 pagesArtificial Neural Networks For Machining Processes SurfacevaalgatamilramNo ratings yet
- Evolving An Artificial Neural Network Classifier For ConditionDocument14 pagesEvolving An Artificial Neural Network Classifier For ConditionvaalgatamilramNo ratings yet
- Composite Layer-Based Analytical Models For Tool-ChipDocument9 pagesComposite Layer-Based Analytical Models For Tool-ChipvaalgatamilramNo ratings yet
- Fuzzy Nonlinear Programming For Mixed-Discrete DesignDocument20 pagesFuzzy Nonlinear Programming For Mixed-Discrete DesignvaalgatamilramNo ratings yet
- Comparison of Two Methods For The Analysis of Composite MaterialDocument7 pagesComparison of Two Methods For The Analysis of Composite MaterialvaalgatamilramNo ratings yet
- Artificial Neural Network Based On Genetic Learning Polyetheretherketone Composite MaterialsDocument10 pagesArtificial Neural Network Based On Genetic Learning Polyetheretherketone Composite Materialschinmay61076100% (3)
- Characterization and Prediction of Some Engineering Properties ofDocument10 pagesCharacterization and Prediction of Some Engineering Properties ofvaalgatamilramNo ratings yet
- Artificial Neural Network Approach To Predict The ElectricalDocument7 pagesArtificial Neural Network Approach To Predict The ElectricalvaalgatamilramNo ratings yet
- Artificial Neural Networks in MeasurementsDocument23 pagesArtificial Neural Networks in MeasurementsvaalgatamilramNo ratings yet
- Application of Neural Networks For Detecting Erroneous Tax Reports FromDocument5 pagesApplication of Neural Networks For Detecting Erroneous Tax Reports FromvaalgatamilramNo ratings yet
- Artificial Neural Network Approach To Predict The Mechanical PropertiesDocument6 pagesArtificial Neural Network Approach To Predict The Mechanical PropertiesvaalgatamilramNo ratings yet
- Robotic Chess "A Robotic Arm Based Chessboard For Visually Challenged"Document8 pagesRobotic Chess "A Robotic Arm Based Chessboard For Visually Challenged"vaalgatamilramNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ZQYM Diesel Cummins Series Injector 2023.07Document13 pagesZQYM Diesel Cummins Series Injector 2023.07harbh9355No ratings yet
- 17012EDocument7 pages17012EAVINASHRAJNo ratings yet
- Watershed & Four Water ConceptDocument31 pagesWatershed & Four Water ConceptNarendra SinghNo ratings yet
- Design of Water Cooled Electric Motors Using CFD and Thermography TechniquesDocument6 pagesDesign of Water Cooled Electric Motors Using CFD and Thermography TechniquesNicolas JerezNo ratings yet
- Eee342 hw3 PDFDocument2 pagesEee342 hw3 PDFRedion XhepaNo ratings yet
- ALFA 4000 - Peru 2 PDFDocument2 pagesALFA 4000 - Peru 2 PDFErick MaderoNo ratings yet
- User's Manual: Motherboard AMD Socket AM2Document56 pagesUser's Manual: Motherboard AMD Socket AM2vagnerrock007No ratings yet
- Marine Fuel Stability and Compatibility IssuesDocument4 pagesMarine Fuel Stability and Compatibility IssuesRebekah SchmidtNo ratings yet
- Example of BVP ProblemsDocument3 pagesExample of BVP ProblemsAbhishek KumarNo ratings yet
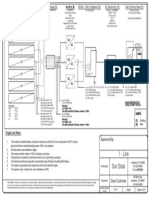
- Sample Solar Permit Plan - 1 Line Drawing PDFDocument1 pageSample Solar Permit Plan - 1 Line Drawing PDFSAEL SOLARNo ratings yet
- The Electromagnetic Spectrum: Multiple ChoiceDocument10 pagesThe Electromagnetic Spectrum: Multiple ChoiceVannie MonderoNo ratings yet
- Usb Modem 2Document4 pagesUsb Modem 2emadNo ratings yet
- Tensile TestDocument15 pagesTensile Testdwimukh360No ratings yet
- What is a Gear Motor? - An In-Depth GuideDocument15 pagesWhat is a Gear Motor? - An In-Depth GuidePuneet KumarNo ratings yet
- Bio BatteryDocument29 pagesBio BatteryDileepChowdary100% (1)
- FrlsDocument25 pagesFrlssudeepjosephNo ratings yet
- CADAM 2000 - Model ParametersDocument3 pagesCADAM 2000 - Model ParametersAqua MaNo ratings yet
- Blast Furnace Cooling System MonitoringDocument27 pagesBlast Furnace Cooling System MonitoringAnil MistryNo ratings yet
- 1 Hyperion Essbase Interview QuestionsDocument2 pages1 Hyperion Essbase Interview Questionssen2natNo ratings yet
- Datasheet Modevapac v2.1 PDFDocument4 pagesDatasheet Modevapac v2.1 PDFParvezNo ratings yet
- 66 67wvh8m8dall BLL-2936104Document50 pages66 67wvh8m8dall BLL-2936104ManunoghiNo ratings yet
- Quality aspects of new product developmentDocument65 pagesQuality aspects of new product developmentSebastian CotinghiuNo ratings yet
- Evaluating SWOT's Value in Creating Actionable, Strategic IntelligenceDocument94 pagesEvaluating SWOT's Value in Creating Actionable, Strategic IntelligenceMJFinnegan4100% (4)
- Third Party Inspection Report: Industry & Facilities Division Page 1 of 9Document9 pagesThird Party Inspection Report: Industry & Facilities Division Page 1 of 9mustafa nasihNo ratings yet
- Sensor Performance Characteristics DefinitionsDocument12 pagesSensor Performance Characteristics DefinitionsKhairul FahzanNo ratings yet
- GT Kompetitor parts list comparisonDocument4 pagesGT Kompetitor parts list comparisonrachmad syahputraNo ratings yet
- A Young Lasallian Is US Environmental ScholarDocument1 pageA Young Lasallian Is US Environmental ScholarDia DimayugaNo ratings yet
- Enprep - 110 EC Steel Cu BrassDocument3 pagesEnprep - 110 EC Steel Cu BrassLựuLiềuLìNo ratings yet
- UGC MarketingDocument16 pagesUGC MarketingJK MarketingNo ratings yet
- Avinash Excat Full ProjectDocument87 pagesAvinash Excat Full ProjectNaguSwamyNo ratings yet