You might also like
- Assignment II and III - Apurva's AnswersDocument15 pagesAssignment II and III - Apurva's Answersapi-26676616No ratings yet
- Class 39 - 41 Introduction To Missile DynamicsDocument38 pagesClass 39 - 41 Introduction To Missile Dynamicsapi-26676616100% (1)
- Class 34 - 35 Modeling of A Inverted PendulumDocument14 pagesClass 34 - 35 Modeling of A Inverted Pendulumapi-26676616100% (1)
- Class 37 - 38 Linear Is at Ion and Its ConsequencesDocument23 pagesClass 37 - 38 Linear Is at Ion and Its Consequencesapi-26676616No ratings yet
- Notes On Missile GuidanceDocument3 pagesNotes On Missile Guidanceapi-26676616No ratings yet
- Assingment II and III - Varun's AnswersDocument23 pagesAssingment II and III - Varun's Answersapi-26676616No ratings yet
- Class 10 - Mathematical Modeling of Liquid Level SystemDocument11 pagesClass 10 - Mathematical Modeling of Liquid Level Systemapi-26676616No ratings yet
- Class 33 - Modeling of A Hydraulically Acutated Gun TurretDocument24 pagesClass 33 - Modeling of A Hydraulically Acutated Gun Turretapi-26676616No ratings yet
- Class 30 - Modeling of A Batch ReactorDocument22 pagesClass 30 - Modeling of A Batch Reactorapi-26676616No ratings yet
- Class 28 - Modeling of A Gear TrainDocument19 pagesClass 28 - Modeling of A Gear Trainapi-26676616100% (2)
- SM II Test QP With AnswersDocument6 pagesSM II Test QP With Answersapi-26676616No ratings yet
- Class 29 - Modeling of A Distillation ColumnDocument16 pagesClass 29 - Modeling of A Distillation Columnapi-26676616No ratings yet
- Class 24-26 PID Controllers and Robust DesignDocument34 pagesClass 24-26 PID Controllers and Robust Designapi-26676616No ratings yet
- Assingment NoDocument2 pagesAssingment Noapi-26676616No ratings yet
- Assignment NoDocument2 pagesAssignment Noapi-26676616No ratings yet
- Class 27 - Modeling of Servo MotorsDocument25 pagesClass 27 - Modeling of Servo Motorsapi-26676616100% (1)
- Assignment - I Answers - VarunDocument15 pagesAssignment - I Answers - Varunapi-26676616No ratings yet
- Class 21-23 - Transmissibility PhenomenonDocument47 pagesClass 21-23 - Transmissibility Phenomenonapi-26676616No ratings yet
- Class 13 - Mathematical Modeling of Thermal SystemDocument15 pagesClass 13 - Mathematical Modeling of Thermal Systemapi-2667661650% (2)
- Assignment - I Answers - AbiranjanDocument10 pagesAssignment - I Answers - Abiranjanapi-26676616No ratings yet
- Class 19-20 - Free Vibrations (Damped and Undamped)Document26 pagesClass 19-20 - Free Vibrations (Damped and Undamped)api-2667661667% (3)
- Class 15-17 Problems For Modeling of SystemsDocument15 pagesClass 15-17 Problems For Modeling of Systemslucy2112No ratings yet
- Class 18 - Introduction To The Vibration PhenomenonDocument13 pagesClass 18 - Introduction To The Vibration Phenomenonapi-26676616No ratings yet
- Class 14 - Mathematical Modeling of Chemical SystemDocument16 pagesClass 14 - Mathematical Modeling of Chemical Systemapi-26676616No ratings yet
- Class 10 - Mathematical Modeling of Liquid Level SystemDocument11 pagesClass 10 - Mathematical Modeling of Liquid Level Systemapi-26676616No ratings yet
- Class 7 - 9 State Space Representation To Transfer Function and Vice VersaDocument13 pagesClass 7 - 9 State Space Representation To Transfer Function and Vice Versaapi-26676616No ratings yet
- Class 11 - Mathematical Modeling of Pneumatic SystemDocument18 pagesClass 11 - Mathematical Modeling of Pneumatic Systemapi-26676616100% (2)
- Class 12 - Mathematical Modeling of Hydraulic SystemDocument14 pagesClass 12 - Mathematical Modeling of Hydraulic Systemapi-26676616No ratings yet
- Class 5 - 6 Analogous SystemsDocument22 pagesClass 5 - 6 Analogous Systemsapi-2667661650% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Thesis TipsDocument57 pagesThesis TipsJohn Roldan BuhayNo ratings yet
- G.Devendiran: Career ObjectiveDocument2 pagesG.Devendiran: Career ObjectiveSadha SivamNo ratings yet
- Core CompetenciesDocument3 pagesCore Competenciesapi-521620733No ratings yet
- "Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Document12 pages"Organized Crime" and "Organized Crime": Indeterminate Problems of Definition. Hagan Frank E.Gaston AvilaNo ratings yet
- Building Material Supplier in GurgaonDocument12 pagesBuilding Material Supplier in GurgaonRodidustNo ratings yet
- Consecration of TalismansDocument5 pagesConsecration of Talismansdancinggoat23100% (1)
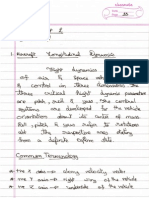
- Rankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothDocument111 pagesRankine-Froude Model: Blade Element Momentum Theory Is A Theory That Combines BothphysicsNo ratings yet
- Class 12 Physics Derivations Shobhit NirwanDocument6 pagesClass 12 Physics Derivations Shobhit Nirwanaastha.sawlaniNo ratings yet
- CycleMax IntroDocument13 pagesCycleMax IntroIslam AtefNo ratings yet
- Pearson R CorrelationDocument2 pagesPearson R CorrelationAira VillarinNo ratings yet
- Rsi r2 Super Rsi FaqDocument14 pagesRsi r2 Super Rsi FaqChandrasekar Chandramohan100% (1)
- Tribes Without RulersDocument25 pagesTribes Without Rulersgulistan.alpaslan8134100% (1)
- SievesDocument3 pagesSievesVann AnthonyNo ratings yet
- 23 Ray Optics Formula Sheets Getmarks AppDocument10 pages23 Ray Optics Formula Sheets Getmarks AppSiddhant KaushikNo ratings yet
- SSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Document22 pagesSSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Ivy JeanneNo ratings yet
- RSW - F - 01 " ": Building UtilitiesDocument4 pagesRSW - F - 01 " ": Building Utilities62296bucoNo ratings yet
- PDFDocument653 pagesPDFconstantinNo ratings yet
- Michael Clapis Cylinder BlocksDocument5 pagesMichael Clapis Cylinder Blocksapi-734979884No ratings yet
- Raiders of SuluDocument1 pageRaiders of SuluBlexx LagrimasNo ratings yet
- Arudha PDFDocument17 pagesArudha PDFRakesh Singh100% (1)
- Topic: Grammatical Issues: What Are Parts of Speech?Document122 pagesTopic: Grammatical Issues: What Are Parts of Speech?AK AKASHNo ratings yet
- Moral GPS: A Positive Ethic For Our Multicultural WorldDocument279 pagesMoral GPS: A Positive Ethic For Our Multicultural WorldLeonard Bowman75% (4)
- Object Oriented ParadigmDocument2 pagesObject Oriented ParadigmDickson JohnNo ratings yet
- CHAPTER 2 Part2 csc159Document26 pagesCHAPTER 2 Part2 csc159Wan Syazwan ImanNo ratings yet
- Poster-Shading PaperDocument1 pagePoster-Shading PaperOsama AljenabiNo ratings yet
- Point and Figure ChartsDocument5 pagesPoint and Figure ChartsShakti ShivaNo ratings yet
- Radio Ac DecayDocument34 pagesRadio Ac DecayQassem MohaidatNo ratings yet
- MPI Unit 4Document155 pagesMPI Unit 4Dishant RathiNo ratings yet
- ISO Position ToleranceDocument15 pagesISO Position ToleranceНиколай КалугинNo ratings yet