You might also like
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- CD 00000063Document11 pagesCD 00000063api-306853111No ratings yet
- L297Document12 pagesL297wtn2013No ratings yet
- LS7290 Stepper Motor ControlDocument12 pagesLS7290 Stepper Motor ControlOlger NavarroNo ratings yet
- L297Document11 pagesL297Igor Rocha PauloNo ratings yet
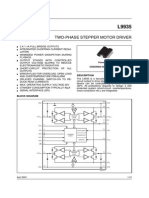
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
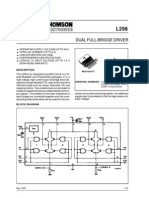
- Dual Full-Bridge Driver: DescriptionDocument13 pagesDual Full-Bridge Driver: DescriptionBaher Bassem MorkosNo ratings yet
- Motor Controller Data SheetDocument13 pagesMotor Controller Data Sheetapi-284769767No ratings yet
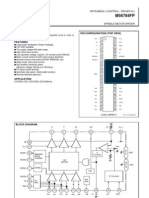
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- LS7290Document9 pagesLS7290Cidão GuimarãesNo ratings yet
- MC3479 Stepper Motor Driver: FeaturesDocument10 pagesMC3479 Stepper Motor Driver: FeaturesHenry CastandNo ratings yet
- GS D200 Stepper DrivesDocument17 pagesGS D200 Stepper DrivesFred BloggsNo ratings yet
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocument14 pagesLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiNo ratings yet
- Imprimir Datasheet 1Document14 pagesImprimir Datasheet 1Randy Siancas VelezNo ratings yet
- ALPHA 10/10P SERVICE MANUALDocument19 pagesALPHA 10/10P SERVICE MANUAL王宗超No ratings yet
- Datasheet l298bDocument14 pagesDatasheet l298bgioganNo ratings yet
- Kta198 ManualDocument4 pagesKta198 ManualnasadllNo ratings yet
- lm2917 NDocument24 pageslm2917 NAlejandro RojoNo ratings yet
- LMD 18200Document14 pagesLMD 18200Itzamary Romero SosaNo ratings yet
- Data Sheet L298 PDFDocument13 pagesData Sheet L298 PDFbaymax love spideyNo ratings yet
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocument26 pagesVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNo ratings yet
- LMD18201 3A, 55V H-Bridge: General DescriptionDocument8 pagesLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoNo ratings yet
- L298 Dual Full-Bridge Driver IC for Motors and RelaysDocument12 pagesL298 Dual Full-Bridge Driver IC for Motors and RelaysBastian RamadhanNo ratings yet
- Mach Cong Suat Cau H - Lmd18200Document14 pagesMach Cong Suat Cau H - Lmd18200hieuhuech1No ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- 19 Current ControlDocument5 pages19 Current ControlZeshan LatifNo ratings yet
- LM2621Document12 pagesLM2621nad_chadi8816No ratings yet
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Document26 pagesFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNo ratings yet
- TB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionDocument18 pagesTB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionAdelNo ratings yet
- LB1845 PWM Current ControlDocument7 pagesLB1845 PWM Current ControlNacer MezghicheNo ratings yet
- 3ph Ac Motor ControlerDocument11 pages3ph Ac Motor Controleradamkam1111No ratings yet
- DeviceCraftDCmotorController 1015BDocument24 pagesDeviceCraftDCmotorController 1015BbetortitaNo ratings yet
- Protek B8110 User Instruction ManualDocument23 pagesProtek B8110 User Instruction ManualXray CrossingNo ratings yet
- Brush LessDocument17 pagesBrush LessPresanth AjayNo ratings yet
- LORAIN POWER PLANT MICROPROCESSOR CONTROL PANELDocument22 pagesLORAIN POWER PLANT MICROPROCESSOR CONTROL PANELRajesh Sharma100% (1)
- LB1845 DDocument9 pagesLB1845 DFernando LizarragaNo ratings yet
- 74 Ls 191Document7 pages74 Ls 191xuankien181991No ratings yet
- lm2907 PDFDocument20 pageslm2907 PDFArieNo ratings yet
- 555 Timer Introduction: A Cheap and Useful Precision Timing DeviceDocument29 pages555 Timer Introduction: A Cheap and Useful Precision Timing DeviceAnsor NtNo ratings yet
- A4954 DatasheetDocument9 pagesA4954 DatasheetAngly1959No ratings yet
- l291 5 Bit D A Converter Position AmplifierDocument8 pagesl291 5 Bit D A Converter Position AmplifierRayner MihailovNo ratings yet
- Current Controller For Stepping Motors: DescriptionDocument8 pagesCurrent Controller For Stepping Motors: Descriptiontryu40No ratings yet
- LM2907Document21 pagesLM2907leorio88No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- 110 Integrated Circuit Projects for the Home ConstructorFrom Everand110 Integrated Circuit Projects for the Home ConstructorRating: 4.5 out of 5 stars4.5/5 (2)
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- PLL and VCODocument35 pagesPLL and VCOG RAJESHNo ratings yet
- الالكترونيات الرقمية المتقدمةDocument4 pagesالالكترونيات الرقمية المتقدمةQUSI E. ABDNo ratings yet
- Experiment 7: The Bipolar Junction Transistor (BJT) Characteristic CurveDocument9 pagesExperiment 7: The Bipolar Junction Transistor (BJT) Characteristic CurveAyeshaNo ratings yet
- Chapter 5 Signal ConditioningDocument70 pagesChapter 5 Signal ConditioningAkramNo ratings yet
- Stereo Toner Control CircuitDocument9 pagesStereo Toner Control Circuitsyed_hafeez_2No ratings yet
- EasaDocument33 pagesEasaAlaa MortadaNo ratings yet
- S-1132 Series: High Ripple-Rejection and Low Dropout Middle Output Current Cmos Voltage RegulatorDocument35 pagesS-1132 Series: High Ripple-Rejection and Low Dropout Middle Output Current Cmos Voltage RegulatorWilliam Rangel GarciaNo ratings yet
- Important MCQ on VLSI Design Logic Gates and CMOS TechnologyDocument4 pagesImportant MCQ on VLSI Design Logic Gates and CMOS TechnologyAkanksha DixitNo ratings yet
- Variable Power Supply 0-24V - Electronic CircuitsDocument6 pagesVariable Power Supply 0-24V - Electronic CircuitsejazNo ratings yet
- Op-Amp Based LC Oscillator With Minimum Components For Wireless CommunicationsDocument6 pagesOp-Amp Based LC Oscillator With Minimum Components For Wireless CommunicationsaryNo ratings yet
- Lab 12: BJT Common Emitter Amplifier: 1. ObjectivesDocument4 pagesLab 12: BJT Common Emitter Amplifier: 1. ObjectivesAnuj MishraNo ratings yet
- RE1 - Noise - Nonlinearity - Low - NoiDocument18 pagesRE1 - Noise - Nonlinearity - Low - NoiDinaj AttanayakaNo ratings yet
- Indikator Water Level Control: Circuit Diagram of Final ProjectsDocument4 pagesIndikator Water Level Control: Circuit Diagram of Final ProjectsJoseph BryanNo ratings yet
- EEL 3304C - Design and Experiment Project Lab # 4 Common-Emitter AmplifierDocument4 pagesEEL 3304C - Design and Experiment Project Lab # 4 Common-Emitter AmplifierHarshaNo ratings yet
- Circuit Note: Dual-Channel Colorimeter With Programmable Gain Transimpedance Amplifiers and Digital Synchronous DetectionDocument8 pagesCircuit Note: Dual-Channel Colorimeter With Programmable Gain Transimpedance Amplifiers and Digital Synchronous DetectionfengheNo ratings yet
- Datasheet NCP81109Document28 pagesDatasheet NCP81109zigmund zigmundNo ratings yet
- PID and Feedback Compensation Design for Control SystemsDocument32 pagesPID and Feedback Compensation Design for Control SystemsNikhil PanikkarNo ratings yet
- Mathcad - Opamp 1974Document7 pagesMathcad - Opamp 1974Frank KarthikNo ratings yet
- Amplifier ျပဳျပင္နည္းDocument24 pagesAmplifier ျပဳျပင္နည္းMyo ThantNo ratings yet
- OPAMP by COEP ProfDocument171 pagesOPAMP by COEP Profonkarsinare1No ratings yet
- Thb7128 InstructionsDocument9 pagesThb7128 InstructionsanhxcoNo ratings yet
- Sir Padampat Singhania University Digital Electronics ExamDocument5 pagesSir Padampat Singhania University Digital Electronics ExamIyyakutti GanapathiNo ratings yet
- 1.3 Series and Parallel Resistance NewDocument32 pages1.3 Series and Parallel Resistance Newnandhakumarme64% (11)
- ConvertersDocument32 pagesConvertersJeff's SKiNo ratings yet
- Gran Mango 3.1416: Resistors Capacitors Potentiometers Parts List (Stock Big Muff)Document2 pagesGran Mango 3.1416: Resistors Capacitors Potentiometers Parts List (Stock Big Muff)Léon GomesNo ratings yet
- Three-Phase Power Systems ExplainedDocument18 pagesThree-Phase Power Systems ExplainededelapolloNo ratings yet
- Electrical Symbols ChartDocument8 pagesElectrical Symbols ChartJoryl Shane Matero RamirezNo ratings yet
- Shantou Huashan Electronic Devices Co.,Ltd.: CBO CEO EBO CES FE CE (Sat) BE (ON) TDocument2 pagesShantou Huashan Electronic Devices Co.,Ltd.: CBO CEO EBO CES FE CE (Sat) BE (ON) TRãŸàñe HãmãdouçhéNo ratings yet
- Lab 4 A Folded-Cascode Operational AmplifierDocument6 pagesLab 4 A Folded-Cascode Operational AmplifierJatinKumarNo ratings yet