You might also like
- ASAT - Volume 12 - Issue ASAT Conference, 29-31 May 2007 - Pages 1-15Document15 pagesASAT - Volume 12 - Issue ASAT Conference, 29-31 May 2007 - Pages 1-15Ramesh BabuNo ratings yet
- (Preprint) Iaa-Aas-Dycoss1-11-05: Mauro Pontani and Paolo TeofilattoDocument19 pages(Preprint) Iaa-Aas-Dycoss1-11-05: Mauro Pontani and Paolo TeofilattoKartik ShankarNo ratings yet
- 01.mechanical Black BoxDocument6 pages01.mechanical Black BoxZaeem Ul IslamNo ratings yet
- Coopertitchener Trifilar1Document30 pagesCoopertitchener Trifilar1api-24490620450% (2)
- Feasibility Analysis of The Modified Point Mass Trajectory Model For The Need of Ground Artillery Fire Control SystemsDocument12 pagesFeasibility Analysis of The Modified Point Mass Trajectory Model For The Need of Ground Artillery Fire Control Systemscacak283No ratings yet
- Inertia Matrices Explained for Launch Vehicle DesignDocument12 pagesInertia Matrices Explained for Launch Vehicle DesignAnonymous swEs7SEgNo ratings yet
- The Post Buckling Behaviour of Bending ElementsDocument23 pagesThe Post Buckling Behaviour of Bending ElementsrkafinaNo ratings yet
- Dynamics Model of Backhoe Devices Considering Excavation Load ForDocument10 pagesDynamics Model of Backhoe Devices Considering Excavation Load ForIdha AprianNo ratings yet
- NR - Numerical Model of Single Main Rotor Helicopter DynamicsDocument10 pagesNR - Numerical Model of Single Main Rotor Helicopter DynamicsHossam T BadranNo ratings yet
- Experiment No (4) Torque and Angular Acceleration of A FlywheelDocument4 pagesExperiment No (4) Torque and Angular Acceleration of A FlywheelNihad MohammedNo ratings yet
- Detection of Bearing Fault in 3 PHASE INDUCTION MOTOR USING WAVELETDocument8 pagesDetection of Bearing Fault in 3 PHASE INDUCTION MOTOR USING WAVELETamrpalaNo ratings yet
- Design of Foundations For Dynamic LoadsDocument446 pagesDesign of Foundations For Dynamic LoadsJose Luis Velasco Cadavid100% (49)
- Mub04 Jour Pra PDFDocument21 pagesMub04 Jour Pra PDFakashpatro25No ratings yet
- IntroductionDocument9 pagesIntroductionJM085No ratings yet
- The Dynamic Characteristics Analysis of Rotor Blade Based On ANSYSDocument11 pagesThe Dynamic Characteristics Analysis of Rotor Blade Based On ANSYSFrancisco HidalgoNo ratings yet
- M1 Work and Energy (FE1073)Document10 pagesM1 Work and Energy (FE1073)Lim RufeiNo ratings yet
- FE1073 M1 Work and Energy Manual PDFDocument10 pagesFE1073 M1 Work and Energy Manual PDFBonza RatashNo ratings yet
- Mass Changing With Time: The Vertical Rocket, EtcDocument8 pagesMass Changing With Time: The Vertical Rocket, EtcEpic WinNo ratings yet
- M1 Work and Energy Lab ManualDocument10 pagesM1 Work and Energy Lab Manualglenlcy0% (2)
- Stochastic Response To Earthquake Forces of A Cable Stayed Bridge 1993Document8 pagesStochastic Response To Earthquake Forces of A Cable Stayed Bridge 1993ciscoNo ratings yet
- Moment of Inertia of a Tennis Ball ExperimentDocument8 pagesMoment of Inertia of a Tennis Ball ExperimentShaheer ShahzadNo ratings yet
- CP1 June 2018Document5 pagesCP1 June 2018Sifei ZhangNo ratings yet
- Microwave-Propelled Sails and Their ControlDocument6 pagesMicrowave-Propelled Sails and Their ControlmegustalazorraNo ratings yet
- Modeling and Simulation Method of Flight TrajectorDocument7 pagesModeling and Simulation Method of Flight Trajectorleorio88No ratings yet
- CP1 June 2019Document6 pagesCP1 June 2019Sifei ZhangNo ratings yet
- Model Rocket Lab Report Rachel Anders Ames Mr. Hendricks, A2 Dec. 11, 2015Document14 pagesModel Rocket Lab Report Rachel Anders Ames Mr. Hendricks, A2 Dec. 11, 2015api-254833527No ratings yet
- Quadcopter Math Model (Amazing)Document26 pagesQuadcopter Math Model (Amazing)Joseph Oberholtzer83% (6)
- Comparative Study of The Geometric Incompatibilities in The Dinamica of Expandable StructuresDocument11 pagesComparative Study of The Geometric Incompatibilities in The Dinamica of Expandable StructureskarrakukafeoNo ratings yet
- Design and Stress Analysis of Connecting Rod For Light Truck EngineDocument7 pagesDesign and Stress Analysis of Connecting Rod For Light Truck EngineRaja Sekhar KonathamNo ratings yet
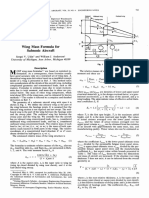
- Wing Mass CalculationDocument3 pagesWing Mass Calculationjacob ellyNo ratings yet
- Rigid Body DynamicsDocument17 pagesRigid Body Dynamicsrammi4978No ratings yet
- Rotation Formulations For Dynamic Relaxation - With Application in 3D Framed Structures With Large Displacements and RotationsDocument8 pagesRotation Formulations For Dynamic Relaxation - With Application in 3D Framed Structures With Large Displacements and RotationsGene KaoNo ratings yet
- Perpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Document17 pagesPerpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Ebru AnaNo ratings yet
- Properties of AreasDocument20 pagesProperties of AreasroyNo ratings yet
- Control of Variable Pitch QuadrotorsDocument6 pagesControl of Variable Pitch QuadrotorsTomislav SertićNo ratings yet
- Transfer Theorem For Moment of InertiaDocument8 pagesTransfer Theorem For Moment of InertiaDianne VillanuevaNo ratings yet
- Blade Design Calvin John PDFDocument35 pagesBlade Design Calvin John PDFElijah NormanNo ratings yet
- FlywheelsDocument33 pagesFlywheelsbijinder06No ratings yet
- Design Optimization of Solid Propellant Rocket Motor Pavel Konečný, Vojtěch Hrubý, Zdeněk KřižanDocument8 pagesDesign Optimization of Solid Propellant Rocket Motor Pavel Konečný, Vojtěch Hrubý, Zdeněk KřižanyararaNo ratings yet
- Multi-Vane Expanders-Geometry and Vane Kinematics - BadrDocument24 pagesMulti-Vane Expanders-Geometry and Vane Kinematics - BadrTodd StevensNo ratings yet
- Integral Analysis of Conveyor Pulley Using ®nite Element MethodDocument30 pagesIntegral Analysis of Conveyor Pulley Using ®nite Element MethodEsteban CorderoNo ratings yet
- الايروداينمك ... دكتور نبراس محمدDocument11 pagesالايروداينمك ... دكتور نبراس محمدAli MahmoudNo ratings yet
- Nasa Technical Note: Aerodynamic-Center Considerations Wings and Wing-Body CombinationsDocument16 pagesNasa Technical Note: Aerodynamic-Center Considerations Wings and Wing-Body CombinationsAngel Villalonga MoralesNo ratings yet
- FlywheelsDocument33 pagesFlywheelsKaranSinghNo ratings yet
- Rocket Lab: Collin TengDocument7 pagesRocket Lab: Collin Tengapi-285958721No ratings yet
- Mechanical Engineering Fundamentals Lab ME-373 Bifilar and Trifilar Suspensions ExperimentDocument43 pagesMechanical Engineering Fundamentals Lab ME-373 Bifilar and Trifilar Suspensions ExperimentHasan Seleem100% (1)
- (2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformDocument5 pages(2009) Research On Unbalance Torque of The Three Axis Air Bearing Based PlatformAlex YangNo ratings yet
- Numerical Study On Performance of Curved Wind Turbine Blade For Loads ReductionDocument9 pagesNumerical Study On Performance of Curved Wind Turbine Blade For Loads ReductionCid CastroNo ratings yet
- YoshimuraDocument4 pagesYoshimurafranco.sosaNo ratings yet
- PHYS 381 W23 MidtermDocument6 pagesPHYS 381 W23 MidtermNathan NgoNo ratings yet
- Conservation of Energy in a Simple PendulumDocument17 pagesConservation of Energy in a Simple PendulumSNS-12 PAVITHRAA TNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- Solenoid Actuators: Theory and Computational MethodsFrom EverandSolenoid Actuators: Theory and Computational MethodsRating: 3 out of 5 stars3/5 (1)
- The Science and Design of the Hybrid Rocket EngineFrom EverandThe Science and Design of the Hybrid Rocket EngineRating: 3 out of 5 stars3/5 (2)
- Harmonic Vector Fields: Variational Principles and Differential GeometryFrom EverandHarmonic Vector Fields: Variational Principles and Differential GeometryRating: 5 out of 5 stars5/5 (1)
- Electrolytic Nickel Phosphorus PlatingDocument34 pagesElectrolytic Nickel Phosphorus PlatingKhoa Vũ100% (1)
- Kemni-508 TDSDocument6 pagesKemni-508 TDSKhoa VũNo ratings yet
- White AnodizeDocument23 pagesWhite AnodizeKhoa Vũ100% (2)
- PressureAltitude Derived PDFDocument4 pagesPressureAltitude Derived PDFrahpooye313No ratings yet
- NASA - sp8126 - Space Vehicle Design Criteria - Glossary of Terms and Table of Conversion Factors Used in Design of Chemical Propulsion Systems PDFDocument104 pagesNASA - sp8126 - Space Vehicle Design Criteria - Glossary of Terms and Table of Conversion Factors Used in Design of Chemical Propulsion Systems PDFKhoa VũNo ratings yet
- Epoxy Concrete MachineDocument26 pagesEpoxy Concrete MachineKhoa VũNo ratings yet
- Pdms TrainingDocument9 pagesPdms TrainingKhoa VũNo ratings yet
- Computational Algorithm For Gravity TurnDocument7 pagesComputational Algorithm For Gravity TurnKhoa VũNo ratings yet
- Optimization and Design For Heavy Lift Launch Vehicles PDFDocument178 pagesOptimization and Design For Heavy Lift Launch Vehicles PDFKhoa VũNo ratings yet
- Dynamic Modeling and Ascent Flight Control of Ares-I Crew LaunchDocument167 pagesDynamic Modeling and Ascent Flight Control of Ares-I Crew LaunchKhoa VũNo ratings yet
- Developments in Liquid Rocket Engine Tech - Richard Cohn PDFDocument53 pagesDevelopments in Liquid Rocket Engine Tech - Richard Cohn PDFKhoa VũNo ratings yet
- 3D Printing GuideDocument77 pages3D Printing GuideKhoa Vũ100% (5)
- Elastomeric Rocket Motor Insulation Developed for Flexibility and Ablation ResistanceDocument32 pagesElastomeric Rocket Motor Insulation Developed for Flexibility and Ablation ResistanceKhoa VũNo ratings yet
- Bi-Propellant Rocket MotorDocument14 pagesBi-Propellant Rocket MotorKhoa VũNo ratings yet
- Role of Nuclear Power - Space Exploration - IAEADocument145 pagesRole of Nuclear Power - Space Exploration - IAEADinesh KumarNo ratings yet
- Angelfire Booster DesignDocument1 pageAngelfire Booster DesignKhoa VũNo ratings yet
- ASTRID Rocket Flight TestDocument7 pagesASTRID Rocket Flight TestKhoa VũNo ratings yet
- Solventless Manufacture of Artillery Propellant Using Thermoplastic Elastomer BinderDocument9 pagesSolventless Manufacture of Artillery Propellant Using Thermoplastic Elastomer BinderKhoa VũNo ratings yet
- Forces Model RocketDocument13 pagesForces Model Rocketlrodriguez_892566No ratings yet
- Comparison of The Effects of Using Tygon Tubing in Rocket Propulsion Ground Test Pressure TransducerDocument10 pagesComparison of The Effects of Using Tygon Tubing in Rocket Propulsion Ground Test Pressure TransducerKhoa VũNo ratings yet
- Approaches To Low Fuel Regression Rate in Hybrid Rocket EnginesDocument12 pagesApproaches To Low Fuel Regression Rate in Hybrid Rocket EnginesKhoa VũNo ratings yet
- Potassium Nitrate Rocket Engine RatiosDocument15 pagesPotassium Nitrate Rocket Engine RatiosKhoa Vũ100% (1)
- Nonlinear Analysis of Free Flight Rockets Using MSC-NASTRANDocument16 pagesNonlinear Analysis of Free Flight Rockets Using MSC-NASTRANKhoa VũNo ratings yet
- Aerodynamic Analysis of a Rocket Configuration with Grid FinDocument5 pagesAerodynamic Analysis of a Rocket Configuration with Grid FinKhoa VũNo ratings yet
- Integrated Diagnostics of Rocket Flight ControlDocument12 pagesIntegrated Diagnostics of Rocket Flight ControlKhoa VũNo ratings yet
- Active Guidance For A Finless Rocket Using NeuroevolutionDocument12 pagesActive Guidance For A Finless Rocket Using NeuroevolutionKhoa VũNo ratings yet
- Fundal Rocket StabilityDocument13 pagesFundal Rocket StabilityĐăng Khôi TrầnNo ratings yet
- A Dynamic Stability Rocket SimulatorDocument16 pagesA Dynamic Stability Rocket SimulatorĐăng Khôi TrầnNo ratings yet
- Ageing Behaviour of HTPB Based Rocket Propellant Formulations NDocument18 pagesAgeing Behaviour of HTPB Based Rocket Propellant Formulations NKhoa VũNo ratings yet