Professional Documents
Culture Documents
Airfoil Aerodynamics: 3 - 1 Forces and Moments
Uploaded by
Rafael SanchezOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Airfoil Aerodynamics: 3 - 1 Forces and Moments
Uploaded by
Rafael SanchezCopyright:
Available Formats
CHAPTER 3
AIRFOIL AERODYNAMICS
3. 1 FORCES AND MOMENTS
It is conventional to separate aerodynamic forces and moments into three force
components (lift, drag, sideforce) and three moments (pitch, yaw, roll). These
components may be defined relative to the wind direction (wind axis system) or relative to
the vehicle centerline (body axis system) or a combination of the two. One must be careful
in the computation or use of force and moment data to use the proper axis system and to be
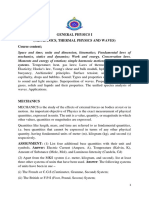
consistent in its use. The most commonly used system is the wind axis system where the
forces are defined either along the free stream velocity vector or perpendicular to it as
shown in Figure 3.1.
Figure 3.1. Wind Axis System
To many people this axis system appears inverted and somewhat unnatural. It was chosen
primarily because it is a standard right hand system. It is often more intuitive to invert part
of the system to make the z axis point "ups and the x axis go with the wind; however, in
that arrangement the moments do not follow the right hand rule. Either system can be used
if one is careful in its use.
It is important to note that the axis system is aligned with the wind, rather than the
horizon or the vehicle axis. This is an easy source of confusion since it is common to
visualize the wind vector concurrent with the horizon or along the aircraft axis. Indeed, in
a straight and level flight situation for an aircraft the free stream wind vector might coincide
with the vehicle axis and the horizon; however it is best not to think in terms of that special
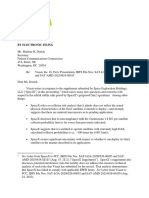
case. Some people prefer to think of the x axis shown in Figure 3.1 as lying along the path
of flight of the vehicle. Figure 3.2 illustrates the problem by showing a typical glide
situation for an aircraft.
63
Figure 3.2. Aircraft in Glide
The three orthogonal forces are lift, L, drag, D, and side force, Y. Lift is defined as the
force along the negative z axis (normally "upward") and acting perpendicular to the free
stream direction. Note that this is not necessarily upward with respect to the aircraft axis or
the horizon as indicated in Figure 3.2.
Drag is defined as the force in the direction of the relative wind or along the negative x
axis. Drag can always be thought of as the force which resists the motion of the vehicle.
Side force, given the symbol Y, is defined as mutually perpendicular to both lift and
drag and is positive outhe the right hand or starboard side of the vehicle.
The three moments, pitch (M), roll (L
R
) and yaw (N) are the moments which tend to
result in a rotation of the vehicle about the y, x or z axes respectively.
Pitching moment, M, is by far the most widely discussed of the three moments since it
must be considered in two dimensional (x, z plane) problems as well as in 3-D cases.
Pitching moment is defined as positive when it tends to raise the nose of the vehicle. It is
this basic definition of the sense of pitch that requires the use of an "inverted" (z
downward) axis system in order to have a right had coordinate system. The pitching
moment acts about the positive y axis.
The rolling moment, L
R
, is the moment which causes rotation about the x axis or
causes an aircraft to roll one wing up and the other down. Note that this definition of roll
may not coincide with that of an airplane pilot who thinks of roll as occurring about the
plane's body axis rather than the wind axis.
Yawing moment, N. rotates the vehicle around the lift direction and is defined as
positive when it is clockwise or results in a nose right motion. Again the use of a body
axis rather than a wind axis may result in a different value for yawing moment.
64
3. 2 DIMENSIONAL ANALYSIS AND NON-DIMENSIONAL
COEFFICIENTS
It is convenient in engineering work to deal with non-dimensional terms or unitless
numbers rather than everyday dimensional terms. The resulting non-dimensional
parameters not only remain unchanged from one unit system to another but they are usually
more meaningful in terms of the physics of a problem than conventional dimensional
numbers.
It is possible to develop the concept of a non-dimensional force coefficient and to
examine the important physical parameter groupings on which aerodynamic forces depend
by using a simple process known as dimensional analysis. Dimensional analysis, as used
here, is simply a process of first identifying the parameters on which fluid forces depend
and then grouping these parameters in such a way that the units or dimensions balance.
Assume then that it is know that the forces one body in a fluid depend on the following:
1. The properties of the fluid itself, pressure, P, density, , viscosity, , and the
speed of sound (fluid's elastic properties), a. Note that one need not include
temperature since P and are considered.
2. The speed of the body relative to the fluid, V.
3. The acceleration of gravity, g.
4. The characteristic size or dimension of the body, l, or the distance of a body
from a fluid boundary, also designated l.
Hence it can be said that the force on a body in a fluid is a function of all of the above,
F f( ,V,l, ,g,P,a)
[3.1]
or to be completely general, the force is a function of each variable to some power,
F f(
A
,V
B
,l
C
,
D
,g
E
,P
G
,a
H
)
[3.2]
Since the left hand side of this equation, [3.1] has the dimensions of force, the right
hand side must also have the same dimensions. Force has units of mass multiplied by
acceleration (kilograms meters/seconds
2
or slugs feet/seconds
2
). To be general then it can
be said that force has dimensions of (mass)x(length)/(time)
2
and letting M, L, and T
represent these physical dependencies one can write the dimensions for force as MLT
-2
.
Likewise, one can write the dimensions for all the other terms in equation 3.2 in terms of
mass, length, and time:
65
Parameter Dimension
velocity (V) LT
-1
length (L) L
density ( ) ML
-3
viscosity ( ) ML
-1
T
-1
pressure (P) ML
-1
T
-2
gravitational
acceleration (g) LT
-2
speed of sound (a) LT
-1
force (F) MLT
-2
Now, substituting these into equation [3.2] the result is a dimensional equation of the
form:
MLT
2
ML
3
( )
A
LT
1
( )
B
L ( )
C
ML
1
T
1
( )
D
LT
2
( )
E
ML
1
T
2
( )
G
LT
1
( )
H
[3.3]
The task is now to balance the above equation dimensionally; i.e.., the sum of the mass
exponents on the left side of the equation must equal those on the right, etc. Equating
exponents of mass, length and time respectively leads to three equations:
(Mass) 1 = A + D + G
(Length) 1 = -3A + B + C - D + E - G + H
(Time) 2 = B + D + 2E + 2G + H
[3.4]
Now, equations [Figure 3.4] give a set of three equations and seven unkowns. These
equations may be solved for the values of any three of the unknowns in terms of the
remaining four. Solving then for A, B, and C in terms of the remaining terms gives:
A = 1 - D - G
B = 2 - D - 2E - 2G - H
C = 2 - D + E
[3.5]
Substituting these solutions [Figure 3.2.5] into the original relationship [3.2.2] and
grouping all terms of like exponents gives:
F V
2
l
2 Vl
_
,
D
gl
V
2
_
,
E
P
V
2
_
,
G
V
a
_
,
H
1
]
1
1
[3.6]
66
It is noted that each of the terms with an unknown exponent is a dimensionless term;
i.e., the term
Vl
is unitless as are
gl
V
2
,
p
V
2
and
V
a
. If the equation is divided
by
V
2
l
2
, both side become unitless.
F V
2
l
2
f
Vl
_
,
gl
V
2
_
,
P
V
2
_
,
V
a
_
,
1
]
1
1
[3.7]
Two conclusions can be drawn from equation [3.7]. The first is that the proper way to
nondimensionalize a fluid force is to divide it by the fluid density, the square of the velocity
and the square of the characteristic dimension of the body or the body's representative area.
Since the term
1
2
V
2
represents the dynamic pressure of the fluid as found in Bernoulli's
equation, a factor of
1
2
is introduced into the relationship and a "force coefficient" is
defined as
C
F
F
1
2
V
2
S
(unitless)
[3.8]
where S is the representative area of the body. In two dimensional problems a
characteristic length (2-D area) is used in the denominator instead of S.
The second conclusion is that the nondimensional fluid force is dependent on the
groups of parameters on the right of equation [3.7]. These groups are known as "similarity
parameters" and are important in relating nondimensional force coefficients found on one
body in a fluid to those on a geometrically similar body of different size. Technically,
equation [3.7] says that for force coefficients on two geometrically similar bodies to be
equal, each of the grouped terms or "similarity parameters" must be identical for the flows
around the two bodies. It is obvious that it would be quite a task to make all of these
similarity parameters equal for tests on bodies of two different sizes or in different fluids.
Fortunately, it is seldom necessary to match all four of these similarity parameters at the
same time as an examination of the meaning of each term will show.
The first term on the right of equation [3.7] is known as Reynolds number, Re.
Re
Vl
[3.9]
67
Reynolds number is a parameter relating inertial effects in a fluid to viscous effects. This is
an important parameter for flow similarity because it is found that laminar-turbulent
transition in a boundary layer is a function of Re and a body at low Re values may have a
significantly different behavior from one at high Reynolds number. The classic example of
Reynolds number effects is found in the flow around a sphere or cylinder, where at low Re
boundary layer separation occurs early, resulting in a high wake drag and at high Re
separation is delayed by turbulence and the wake drag is reduced.
Reynolds number is an important similarity parameter which must be considered in
every flow. However, there are some cases where it may be ignored. These are generally
where flow separation occurs at a sharp corner on a body and the separation point will not
be influenced by the laminar or turbulent character of the flow. For this reason Re may not
be a factor when considering flows around some non-streamlined shapes. However, these
situations are rare and Reynolds number is almost always the most important factor in
considerations of flow scaling and similarity.
The second most important similarity parameter in most aerospace problems is Mach
number, M, where
M
V
a
[3.10]
This parameter indicates the relevance of compressibility effects. Compressibility effects
occur due to elastic compression and expansion of a fluid as it passes over a body. These
are important only when compression or mach waves begin to form in a fluid as it flows
around a body. Hence, Mach number similarity need not be considered at speeds giving
Mach numbers less than 0.5 or so. In water Mach number need not be considered since
water is an incompressible fluid.
In some aerospace problems both Reynolds number and Mach number are important
but it is impossible to satisfy both types of similarity at one time. Here, tests are usually
done to examine separately the effects of each parameter and the resulting scaling of data
must be done using engineering judgement based on past experience and a thorough
understanding of the problem at hand.
The remaining two parameter groupings on the right side of equation [3.7] are
encountered primarily in the fields of naval architecture or ocean engineering. The first of
these is the inverse square root of a widely used similarity parameter known as Froude
number (F), where
F V gL
[3.11]
Froude number is the ratio of inertial forces to gravitational forces and it is essentially a
measure of the importance of the effects of a fluid boundary or interface on the forces on
the body. Here the term L refers to a distance which may be the distance of the vehicle
above or below the ground or air-water interface or the height of waves generated by a
68
ship. The importance of Froude number is perhaps most easily understood when
considering the motion of a submarine below the surface. When a submarine is sufficiently
far below the surface it can move without disturbing the surface; however, if it is close to
the surface, waves are generated. The energy present in these waves represents an energy
loss by the submarine and consequently must be treated as part of the vehicle's drag. In
like manner any vehicle moving over, under or through the air-sea interface which causes
such surface waves develops a wave drag and for proper simulation of this drag in testing
Froude number for aerodynamic similarity, hydrodynamic problems often involve a need
for both Re and F similarity at the same time, a condition which may not be easily
achievable.
The last of the four similarity parameters developed in equation [3-7] is Euler number,
Euler number
P
V
2
[3.12]
which is a measure of the ratio of inertial forces and pressure forces. This term assumes
importance when cavitation is a problem on ship hulls or propellers. Basically, cavitation
occurs when the pressures caused by motion of water around a body become low enough
to result in boiling of the water. Cavitation can result in loss of lift on hydrofoils, loss of
thrust on propellers, and high drag on hulls and is thus a very important phenomenon.
Proper scaling of flows where cavitation may occur therefore nessitates the use of Euler
number to insure similarity. In practice Ocean Engineers define a slightly different number
called the cavitation number, , where
P P
v
V
2
and P
v
is the vapor pressure of the water. This is used in place of Euler number as the
cavitation similarity parameter.
Example 3.1. An aircraft is designed to fly at 250 mph at an altitude of 25,000 feet
where the pressure, temperature and density are standard. We wish to test a one-tenth scale
model of this plane in a wind tunnel at sea level standard conditions. What problems might
we have in achieving flow similarity?
The Reynolds number for the full scale aircraft would be
Re
f
Vl
f
and, at standard conditions for 25,000 feet and 250 mph we have
0.001066sl ft
3
3.196x10
-7
sl ft
V = 250mph = 367.5 fps
69
This gives a Reynolds Number per foot of
Re
f
l
f
1.226x10
6
ft
-1
Note: It is common practice in wind tunnel testing to speak of Reynolds Number
per foot.
To achieve this Reynolds Number on a one-tenth scale model in the wind tunnel at
sea level conditions we need to make
Re
f
Re
m
SL
V
m
1
m SL
Re
f
1
f
1.223 10
6
1
b
Thus, the speed in the wind tunnel test section must be
V
m
1.226x10
6
l
f SL
( )
SL
l
m
Using
SL
= 0.002376 sl ft
3
,
SL
= 3.719 x 10
7
sl ftsec and l
f
l
m
= 10, we
get:
V
m
1919ft sec 1305mph
But this supersonic speed quite obviously violates the Mach Number similarity
requirement! Does this mean that it is impossible to properly test for full scale
aerodynamics effects by using small scale models in a wind tunnel? Fortunately not.
One solution is to use a sealed, variable density wind tunnel. Most of the early
wing aerodynamics tests of the National Advisory Committee for Aeronautics ( NACA ),
NASA's predecessor, were done in such a tunnel at Langley Field using 1/20th scale
models tested in a tunnel pressurized to 20 atmospheres, giving a density twenty times
normal and matching full scale Reynolds Numbers.
Another commonly used method, provided that the model scale is not too small, is
to "fool" the flow into behaving like it would at a higher Reynolds Number. The primary
flow influence of Reynolds Number on a streamlined shape is to determine where on the
shape the flow in the thin "boundary layer" next to the body changes from a smooth
"laminar"" behavior to a turbulent behavior. This, in turn, partly determines where flow
separation from the surface might occur. We can "fool" the flow by forcing or tripping"
boundary layer transition from laminar to turbulent flow by using a "trip strip" which can
be as simple as a line of fine sand grains glued to the surface.
70
3. 3 FORCE AND MOMENT COEFFICIENTS
In the preceeding section it was shown that thenondimensional force coefficient took
the form
C
F
Force
1
2
V
2
S
Hence, force coefficients can be defined for the aerodynamic forces of lift, drag and
sideforce:
lift coefficient, C
L
lift
1
2
V
2
S
drag coefficient, C
D
drag
1
2
V
2
S
side force coefficient, C
Y
side force
1
2
V
2
S
As with all force coefficients these are unitless (nondimensional) and therefore are invariant
from one unit system to another.
One problem which appears when using force coefficients is the area, S, to be used in
the denominator. This is merely a representative area which is characteristic of the body or
case being considered. For example, when using lift coefficient the area S used is almost
always the planform or projected area of the wing. This is logical since the wing is the lift
producing element of the vehicle. The best area to use for drag coefficient is not as obvious
and any one of several areas will be found in common usage; wing planform area when
considering drag wings, fuselage or hull cross sectional when considering such shapes, or
"wetted" (total surface) area when skin friction drag is being treated. Similar variations will
be found when defining characteristic areas for side force coefficients. Hence, it is
important that one be extremely careful in interpreting data in coefficient form since
themagnitude of the resulting coefficient may vary greatly depending on the choice of a
representative area. For the same reason extreme care must be exercised in combining
71
coefficients. The drag coefficients of various parts of a vehicle cannot merely be added to
get a total drag coefficient unless all the coefficients are based on a common area
Force coefficients can also be similarly defined in two dimensions where only a two
dimensional section of a body such as an airfoil section is under consideration. In these
cases only lift and drag are considered and the forces are two dimensional forces; that is,
they are expressed in units of force-per-unit-length such as force-per-foot or meter of wing
span. Therefore, to obtain a nondimensional coefficient only a characteristic length is
needed in the denominator.
C
L
2D
L
1
2
V
2
1
C
D
2D
D
1
2
V
2
1
3.13
The length commonly used for two dimensional lift and drag coefficients is the wing chord
(distance from leading-to-trailing edge) when dealing with airfoils.
Moment coefficients are similarly defined except that an additional length factor is
needed in the coefficient denominator. The length most commonly used is the wing's mean
chord c or the length of the body.
C
M
M
1
2
V
2
S c
3.14
In like manner coefficients for rolling and yawing moment may be defined with appropriate
characteristic lengths.
In two dimensions the pitching moment coefficient becomes
C
M
2D
M
1
2
V
2
c
2
3.15
72
3. 4 AIRFOIL GEOMETRY
In order to discuss airfoil aerodynamics it is necessary to have a grasp of the
terminology commonly used to define the geometry of a wing. This terminology will be
discussed in reference to Figure 3.3 which shows the "planform" view of a wing and
Figure 3.4 which shows a typical airfoil section.
Figure 3.3. Wing Planform Geometry
Figure 3.4. Wing Section Geometry
73
The wing span, b, is the tip-to-tip dimension perpendicular to the fuselage centerline
indlucing the width of the fuselage.
Several chords may be defined for a 3-D wing. The root chord, C
o
, is the distance
from the airfoil leading edge to trailing edge taken parallel to the fuselage centerline at he
wing-fuselage junction. The tip chord C
T
is the same dimension taken at the wing tip.
Two
different definitions of a mean or average chord are in common usage. The mean chord c
is defined as
c
o
b 2
cdy
o
b 2
dy
[3.16]
where y is measured from fuselage centerline along the span to the wing tip. Also defined
is the "aerodynamic mean chord", cA ,
cA
o
b 2
c
2
dy
o
b 2
cdy
[3.17]
Wing area, S, is usually thought of as the planform area rather than the actual surface
area. The planform area includes the imaginary area between the wings in the fuselage.
When this fuselage area is to be ignored, ie., the planform area of the exposed wing only is
to be used, this is referred to as the net wing area S
N
.
A term which is of some importance in airfoil fluid dynamics is the "aspect ratio"
AR . Aspect ratio is a measure of the "narrowness" of the wing planform and is the ratio of
the wing span to the mean chord
AR b c
[3.18a]
which is often written as
AR
b
2
bc
b
2
S
[3.18b]
a form which is easier to use. Aspect ratio will be found to be a measure of the 3-D
efficiency of a wing.
74
While some airfoils have a rectangular planform, most are swept and/or tapered to some
degree. Wing sweep can be measured at the leading or trailing edge or at some other point
such as a line along the quarter chord (C/4 behind the leading edge) and the sweep angle is
given the symbol . Taper is defined in terms of a taper ratio where C
r
C
o
. The
wing angle of attack ( ) shown in Fig. 3.4 is defined as the angle between the chord line
and the fluid velocity vector.
Wing camber is usually expressed as percent camber of an airfoil section where percent
camber is the percentage of the airfoil chord represented by the maximum perpendicular
distance between the chord and camber lines. Wing thickness is also defined in terms of
percent chord.
Figure 3.5 illustrates wing dihedral which is defined as a dihdral angle due to the
inclination of the wings from a common plane. Dihedral is built into wings for roll
stabaility purposes and the dihedral angle is defined as 2 , the sum of the inclination angles
of both wings. A negative dihedral is called "anhedral".
Figure 3.5. Wing Dihedral
75
3. 5 NACA AIRFOIL DESIGNATIONS
In the early days of wing development wing shapes were often given names and
numbers in a very nonsystematic manner. Sections were names after researchers such as
Clark or Eiffel or after laboratories or research groups (RAF, Gottingen) and each group
developed its own series of airfoil shapes. In an attempt to systematize airfoil research and
designation, the National Advisary Committee for Aeronautics or NACA (NASA's
forerunner), devised a systematic scheme of testing and classifying airfoil sections.
Hundreds of airfoil sections were thoroughly tested and catalogues. These airfoils were
designated by four, five, and six digit numbers according to basic shape and performance.
The data from these tests is reported in numerous NACA publications and some of it will
be referenced in later sections. To properly use this data one should understand the
meaning of the NACA airfoil designations.
Most of the NACA airfoils fall into the four, five or six digit airfoil series as explained
in examples below.
NACA 2412
2 - The maximum camber of the mean line is 0.02c
4 - the position maximum camber is 0.4c
12 - the maximum thickness is 0.12c
NACA 23021
2 - the maximum camber of the mean line is approximately 0.02c (also the
design lift coefficient is 0.15 times the first digit for this series)
30 - the position of the maximum camber is at 0.30/2 = 0.15c
21- the maximum thickness is 0.21c
NACA 63
2
-215 (laminar flow series)
6 - series designation
3 - the maximum pressure is at 0.3c
2 - the drag coefficient is near its minimum value over of lift coefficients of
0.2 above and below the design C
L
2 - the design lift coefficient is 0.2
15 - the maximum thickness is 0.15c
There are other series of airfoil sections besides the ones given above, however, these
are most common. There is a new class of airfoil which will be discussed later that is being
developed out of the "super critical" design of wing. NASA has now began to
systematically number these shapes in categories of low, medium and high speed airfoils
with shapes given designations such as LS(1)-0417 and MS (1)-0313 etc. Hence, the
process of systematically defining and designating airfoil shapes still continues.
76
3. 6. PITCHING MOMENT AND ITS TRANSFER
Before a discussion of airfoil characteristics can be meaningful a better understanding
of pitching moment is helpful. Since most of the later discussion of airfoils will center
around the dimensional case the only moment of concern will be the pitching moment. It is
obvious that pitching moment can be defined as acting about any chosen point on the
airfoil, however, its value will vary depending on the point of definition. It is therefore
convenient to choose some sort of standard reference points for definition of pitching
moment which will be meaningful physically. One then needs to be able to transfer a
pitching moment which has been measured or calculated at a given point on the airfoil to
one of the chosen reference points or any other location.
In order to transfer the pitching moment all forces and moments acting on the airfoil
must be known. In two dimensions this means that one must know the lift, drag and
pitching moment at some point. Suppose, for example, that wing has been mounted in a
wind tunnel and the lift, drag and pitching moment measured at the mounting point (a), a
distance, a, behind the airfoil's leading edge, as shown in Figure 3.6 (a) and that one needs
to know the pitching moment about a different point x where a structural member is to be
located.
Figure 3.6. Transfer of Pitching Moment
The forces are invariant in the transfer, however, their effects on the moment must be
considered.
L
a
L
x
D
a
D
x
77
To examine the effect of the moment transfer take the moments in each case relative to a
common reference point, the leading edge. In case a, the lift and drag produce moments
around the leading edge of
a ( ) Lcos ( )
and a ( ) Dsin ( )
Since both moments are counterclockwise they are considered negative.
Thus, the entire moment about the leading edge is
M
LE
= M
a
- Lacos - Dasin
Likewise for wing b
M
LE
= M
x
-Lxcos -Dxsin
Since these two moments must be identical, equating [3.19] and [3.20] gives
M
x
= M
a
- Lcos Dsin ( ) a - x ( )
converting to coefficient form by dividing by
1
2
V
2
c
2
gives
C
Mx
C
Ma
C
L
cos +C
D
sin ( )
a
c
x
c
_
,
As mentioned previously, there are some cases of special interest regarding placement
of pitching moment. One such case is the point where the pitching moment becomes zero
and another is the point where the moment becomes a constant over a wide range of angle
of attack or lift. Both of these may be important both aerodynamically and structurally in
the design of a wing. These two points are called the center of pressure and the
aerodynamic center, respectively.
The aerodynamic center is probably the most commonly used reference point for
forces and moment on an airfoil. If one were to measure the forces and pitching moment on
an airfoil over a wide range of angles of attack or lift coefficient and then for each value of
C
L
look at the values of C
M
at various chordwise positions on the wing, one special point
would be found where C
M
was virtually constant for all values of C
L
This point is the
aerodynamic center.
78
The aerodynamic center is defined as the point along the chord where the pitching
moment coefficient is constant and independent of the lift coefficient. Note that C
M
is
constant at the aerodynamic center and not necessarily zero. There are some limits to this
definition since at high angles of attack where C
L
does not change linearly with the
aerodynamic center may shift; however, the concept of an aerodynamic center is very
useful and valid over the normal operating range of C
L
's for an airfoil.
It is therefore useful to find an equation which will locate the aerodynamic center once
the forces and pitching moment about some point on the airfoil have been found.
Returning to equation [3.22] and assuming that the unknown position x is the aerodynamic
center
C
M
xac
C
Ma
C
L
cos +C
D
sin ( )
a
c
x
ac
c
_
,
[3.23]
Several assumptions can be used to simplify this equation based on the already
mentioned fact that the definition for the aerodynamic center is only meaningful for
moderate angles of attack. At these angles cos is approximately ten times the magnitude
of sin ,
cos 10sin
Also at moderate one normally finds that C
L
is about twenty times the magnitude of
C
D
,
C
L
20C
D
therefore,
C
L
cos 200C
D
sin
and the latter term can be neglected. Using this and assuming Cos is approximately
unity gives
C
Mx
ac
C
M
a
C
L
a
c
x
ac
c
_
,
[3.24]
Now the definition for aerodynamic center can be utilized. This definition states that at
the aerodynamic center C
M
does not vary as C
L
is changed, or
dC
Mac
dC
L
0
79
To use this the derivative of equation [3.23] is taken with respect to C
L
,
dC
Mac
dC
L
dC
Ma
dC
L
dC
L
dC
L
a
c
x
ac
c
_
,
By definition then the term on the left becomes zero and the derivative of C
L
with respect
to itself is unity; thus, the equation can be rearranged as
x
ac
c
a
c
dC
Ma
dC
L
[3.24]
Using the equation 3.24 the position of the aerodynamic center can be found as a
distance x
ac
from the leading edge by finding the value of the derivative of the known
moment coefficient with respect to the lift coefficient. This can be easily obtained by
plotting a graph of C
M
versus C
L
and measuring the slope of the curve. Such a curve will
be essential linear over a normal range of angle of attack for most common airfoils.
EXAMPLE 3.2 For a particular airfoil section the pitching moment coefficient about a
point 1/3 chord behind the leading edge varies with the lift coefficient in the following
manner:
C
L
K 0.2 0.4 0.6 0.8
C
M
K 0.02 0.00 + 0.02 + 0.04
Find the aerodynamic center and the value of C
Mo
.
It is seen that C
M
varies linearly with C
L
, value of dC
M
dC
L
being
0.04 0.02 ( )
0.80 0.20
+
0.06
0.60
+0.10
Therefore, from equation 3.12, with a/c = 1/3
x
ac
c
1
3
0.10 0.233
The aerodynamic centre is therefore at 23.3% chord behind the leading edge.
Plotting C
M
against C
L
gives the value of C
Mo
, the value of C
M
when C
L
= 0, as
-0.04.
80
Theoretically, on a flat plate or circular arc airfoil in subsonic flow the aerodynamic
center is exactly one forth of the chord from the leading edge or at a point called the
"quarter chord". In practice it is usually from 23 to 25% of the chord from the leading edge
at incompressible speeds. For this reason it is popular to define aerodynamic forces and
pitching moments about the quarter chord as is the practice in may reports of tabulated
airfoil aerodynamic data.
When speeds are high enough for compressibility to become a factor (M 0.5) the
aerodynamic center will start to move rearward along the airfoil. The theoretical position of
the aerodynamic center in supersonic flow is at 50% chord. This shift will be examined in a
later section where compressibility effects on airfoils are discussed.
The center of pressure, while not necessarily a fixed point over a range of or
C
L
, is important since this is the point where the moment disappears. It is the point, not
necessarily on the chord, where the pitching moment is zero for a particular value of lift.
Returning to equation [3.20] the following relation can be written relating the moment at the
leading edge, M
LE
to the moment at the center of pressure M
MP
.
M
LE
M
MCP
Lcos +Dsin ( )k
CP
C
Now, recognizing that by definition M
CP
= O and writing X
CP
as k
CP
C where k
CP
is the
fraction of the chord to the center of pressure, the result is
M
LE
M
CP
Lcos a + Dsin a ( )k
CP
C
.
Writing the same equation with the moment about the aerodynamic center in the equation
gives
M
LE
M
ac
Lcos + Dsin ( )Xac
Now equating the two equations [3.25] and [3.56] and dividing by
1
2
V
2
c
2
to get the
relation in coefficient form gives
C
Mac
C
L
cos + C
D
sin ( )
Xac
c
C
L
cos + C
D
sin ( )kcp
Solving for kcp, the position of the center of pressure as a fraction of the chord,
kcp
Xac
c
C
Mac
C
L
cos + C
D
sin
81
Here again, since is relatively small and C
L
> > C
C
, the term C
D
sin can be
neglected and cos is assumed to be unity, giving
kcp
Xac
c
C
Mac
C
L
Hence a relation has been developed which will determine the position of the center of
pressure for any value of C
L
once the pitching moment at the aerodynamic center and the
location of the aerodynamic center known.
Since C
Mac
is almost always negative it can be seen from equation [3.28] that
kcp
Xac
c
will be positive, indicating that the center of pressure is almost always behind
the aerodynamic center.
Example 3.3 For the airfoil section of Example 3.2, plot a curve showing the
approximate variation of center of pressure position with lift coefficient, for lift coefficients
between zero and unity.
For this case, kcp 0.233
0.04
C
L
0.233+
0.04
C
L
82
The corresponding curve is shown above. It shows that kcp tends asymptotically to Xac as
C
L
increases, and tends to infinity behind the airfoil as C
L
tends to zero. For values of
C
L
less that 0.05 the center of pressure is actually behind the airfoil.
For a symmetrical section (zero camber) and for some special camber lines, the pitching
moment coefficient about the aerodynamic center is zero. It then follows, that kcp = x
ac
;
i.e., the center of pressure and the aerodynamic center coincide, and that for moderate
incidences the center of pressure is therefore stationary at about the quarterchord point.
3. 7 AIRFOIL AERODYNAMIC PERFORMANCE
Now that the meaning of forces and moments on airfoils have been discussed and the
terminology of airfoil geometry is understood, the effects of changes in airfoil geometry
and fluid flow behavior can be explored. The discussion that follows will be very general
and many exceptions can undoubtedly be found to the examples given; however, the airfoil
behavior discussed will be that typical of most airfoils.
Any discussion of airfoils should begin with the simple symmetrical airfoil which
typically exhibits an aerodynamic behavior similar to that shown in Figure 3.7.
Theoretically the lift coefficient for a two dimensional airfoil increases linearly with a curve
slope of 2 per radian when plotted against . When the C
L
curve begins to become
non-linear, flow separation is beginning along the upper surface of the airfoil. As
separation or stall progresses the curve slope decreases until a peak is reached and beyond
this angle of attack C
L
will decrease. At this peak the value of lift coefficient is termed
C
Lmax
The nature of the stall region will vary with leading edge radius, Reynolds number
and other factors which will be discussed later.
Fig. 3.7. Symmetrical airfoil characteristics.
83
The pitching moment coefficient shown is for the quarter chord position and since this
is roughly the position for the aerodynamic center for an airfoil in incompressible flow,
C
Mc 4
is constant over the range of where dC
L
d is constant.
The drag coefficient for the symmetrical airfoil is seen to be at a minimum at a C
L
of
zero which corresponds to a zero angle of attack. Drag coefficient rises rapidly in the stall
region as wake drag increases.
The effects of camber on an airfoil are illustrated in Figure 3.8.
Fig. 3.8. Effects of Camber
The primary effect of camber on an airfoil is to shift the C
L
vs curve to the left which
means that the cambered airfoil produces a finite lift at a zero nominal angle of attack. The
cambered airfoil experiences a zero lift at some negative angle of attack designated
LO
.
Stall usually occurs at a lower nominal angle of attack for the cambered airfoil, however
C
Lmax
will usually be somewhat increased over that for a symmetrical airfoil of comparable
thickness and leading edge radius.
Increasing camber is seen to produce a larger negative C
Mc 4
and to cause shift in the
drag polar to correspond to the C
L
shift.
The effects of changes in airfoil thickness depend largely on where the maximum
thickness of the airfoil occurs. It is somewhat intuitive that a thicker section will produce a
higher drag coefficient, however, the primary effect of thickness is on the wings stall
behavior and the lift curve slope. The effect of thickness on the lift curve slope varies with
the distribution of the thickness along the chord as shown in Figure 3.9
84
Fig. 3.9 Effect of Thickness on Lift Curve Slope
For the NACA 4 and 5 digit series airfoils the slope of the lift curve is seen to decrease
slightly as thickness increases (the theoretical slope should be 2 radian or
0.10966/degree)/ whereas, for the 63 series airfoil it shows an increase.
The thickness can also either increase or decrease C
Lmax
as illustrated in Figure 3.10.
An increase in thickness up to a point can lead to a higher C
Lmax
because of its effect on
improving the leading edge radius, however further increases increase the likelihood of
earlier separation over the rear of the airfoil.
Figure 3.10. Thickness effects on C
Lmax
85
The most significant effect of thickness is to be seen near the airfoil's leading edge in
terms of leading edge radius. Too small a leading edge radius can result in an abrupt stall
with a sudden decrease in lift coefficient. A larger leading edge radius can smooth the stall
and give an increase in C
LMax
as shown in Figure 3.11.
Figure 3.11
The effects of Reynolds number on airfoil performance are due to the influence of
Reynolds number on the airfoil boundary layer and on flow separation. These effects have
been discussed to some extent earlier. At low values of Re a laminar boundary layer exists
over a large distance from the leading edge of the airfoil. A laminar boundary layer is very
poor at resisting separation over the region of the airfoil where the flow is slowing down
and the pressure is increasing, and early flow separation may result, giving larger drag and
early stall. At high Re values the boundary layer goes turbulent at an early point on the
airfoil and because of the ability of a turbulent boundary layer to resist flow separation,
wake drag may be reduced and stall delayed. These effects are illustrated in Figure 3.12
for a typical airfoil.
Figure 3.12. Reynolds Number Effects on Lift and Drag
86
One of the more important effects of Reynolds number is its influence on the near stall
region at high angles of attack. Increasing Reynolds number almost always increases
C
LMax
and it can also have a significant effect on the nature of stall as shown in Figure
3.13. For a particular airfoil it is seen that at low Re a fairly smooth stall exists with a
relatively low C
LMax
. As Re is increased a higher C
LMax
is obtained but the stall is a
sharp one. Here the high Re flow is able to resist separation but when it finally occurs it
suddenly covers a large portion of the airfoil. At even higher Re the turbulent boundary
layer is able to resist a sudden leading edge separation and an ever higher C
LMax
is
achieved with a somewhat improved stall behavior.
Figure 3.13. Effect of Re on Stall
The effect shown in Figure 3.13 is also a function of the airfoil thickness and
particularly the leading edge radius even small increases in Re may increase C
LMax
while
on a thin airfoil with small leading edge radius it may be necessary to go to very high
values of Re before significant C
LMax
increases occur, as shown in Figure 3.14. A small
leading edge radius produces very large flow accelerations at high angles of attack resulting
in large pressure deficits. The subsequent pressure rise as the flow slows down again over
the airfoil's upper surface is also very rapid and this large "adverse" pressure gradient
causes flow separation. Very high Reynolds numbers are required to resist the separation
inducing effects of this large pressure gradient. on a thicker airfoil with a larger leading
edge radius the pressure gradient is not as large and it is not necessary to reach as large a
value of Re to control separation.
Fig. 3.14. Effects of thickness and Re on C
LMax
87
Compressibility effects on an airfoil must be considered at Mach numbers above 0.5 or
so. Even at relatively modest subsonic speeds the local velocities of air over a wing may
approach the speed of sound. When the free stream velocity is great enough that the local
flow at some point on the upper surface of the airfoil reaches the speed of sound the airfoil
is said to have reached its "critical Mach number, M
crit
." For example, the NACA 4412
airfoil flying in air at sea level standard conditions will begin to experience locally
supersonic flow at about 20 - 30% of the chord behind the leading edge at a speed of 592
fps or 180m/s. Since the speed of sound is 1117 fps at sea level the wing is flying at a
Mach number of 0.53. Hence its critical Mach number M
crit
= 0.53.
Once a region of supersonic flow beings to form on the airfoil a shock wave will form
as the flow "shocks" down to subsonic flow. In a shock wave the flow deceleration occurs
very suddenly resulting in a sharp, essentially instantaneous, pressure increase. It is this
pressure increase or compression wave which results in the sonic boom when the wave is
strong enough to reach the ground. The sudden pressure increase in the shock wave acts
as an almost infinite adverse pressure gradient on the wing's boundary layer, resulting in
almost certain flow separation. This process is illustrated in Figure 3.15.
Figure 3.15. Transonic Flow Patterns Around an Airfoil
As this supersonic flow region and accompanying shock wave grow the separated
wake also grows, increasing drag and changing the manner in which lift is produced on the
wing. This causes the aerodynamic center to shift and large changes in the pitching
moment about the quarter chord. These changes with Mach number are shown in Figure
3.16 as changes in the slope of the lift curve, drag coefficient and moment coefficient about
the quarter chord.
88
Figure 3.16. Compressibility Effects on Lift Curve Slope, Drag and Pitching Moment
It is these large changes which created the myth of the "sound barrier" in the early days
of transonic flight. For an aircraft designed for subsonic flight these changes could easily
lead to disaster when the wing reached and passed its critical Mach number in a high speed
dive. When these speeds were reached there was a sudden sharp rise in drag which
required thrust beyond that available in the engine technology of the day, and worse, the
sudden aerodynamic center shift and flow separation caused severe stress in the structure
and loss of control. As shown in Figure 3.16-c the value of C
Mc 4
may go from a negative
to a positive value, resulting in a complete reversal of the stability behavior of the aircraft
and control behavior. The result was often a disaster where the aircraft went out of control
and broke up in mid-air. Once powerplants were large enough to handle the drag rise and
aircraft were designed to handle the moment shifts it became possible to fly in and through
the transonic regime.
3. 8 FLAPS AND HIGH LIFT DEVICES
In order to fly, an aircraft must produce enough lift to counteract its weight. From the
equation for lift coefficient [3.12] it can be seen that the lift generated by a wing is a
function of its area, (S), the square of its velocity (V
), the air density ( ), and the lift
coefficient (C
L
).
Lift
1
2
V
2
SC
L
Hence, lift can be increased by increasing any one of these four parameters. This presents
little problem in high speed flight since for a given wing and angle of attack the lift
increases as the square of the speed. There are however, problems at lower speeds.
89
The lower limit for the airspeed of a wing is its stall speed V
STALL
. This is the speed
at which a wing of given area will stall at a given altitude (or density). Stall occurs when
the lift coefficient has reached its maximum (C
LMax
). Thus for a given wing area, density
and weight of aircraft, the minimum flying speed is given by:
V
min
L
1
2
SC
Lmax
2W
SC
L max
This is obviously then the speed which will result in the shortest takeoff or landing roll.
Naturally, it would not be safe to land or takeoff an aircraft at C
LMax
conditions since it is
on the verge of stall; thus, a slightly higher speed is used to give a safety factor. This
speed is usually figured to be 1.3V
STALL
. However, the fact still remains that the
minimum safe flying speed and, hence, the minimum landing or takeoff distance is
determined by C
LMax
for a wing at a given altitude, weight and wing area.
In the early days of aviation, when more lift was needed to keep landing and takeoff
distances within limits, a larger wing area was used. However, this also increased the drag
of the aircraft and limited its cruise speed. A more highly cambered wing or one which
was relatively thick to give a larger leading edge radius could also be used to increase
C
LMax
but these also increased drag and limited cruise speed. Therefore, the cruise speed
of an aircraft was effectively limited by the length of runway available for the takeoff and
landing. What was needed was a way to use a minimal drag wing for high speed cruise
and then increase wing area and/or camber for takeoff and landing to reduce the required
takeoff and landing speeds.
The answer to this requirement was the flap. The basic idea behind the use of the flap
is that of developing a variable camber airfoil which will normally have a low camber, low
drag shape but can have its camber increased when a higher maximum lift coefficient is
needed for low speed flight. Adjustable camber airfoils were built and flown as early as
1910 and the hinged flap can be traced to as early as 1914 in England.
Theory can show that a change in camber near the trailing edge of an airfoil has a much
greater effect on C
L
than changes at any other position. Hence flaps are, in their simplest
form, merely hinged portions of the airfoil's trailing edge as shown in Figure 3.17. The
typical effects of flap deflection are also shown in the figure to be essentially the same as
adding camber.
90
Figure 3.17. Aerodynarnic Effects of the Flap
.
91
There are many different designs for flaps, some more effective than others. The
effectiveness of a variety of flaps is illustrated in Figure 3.18.
Designation Diagram C
LMax
at C
LMax
(degrees)
L D
at C
LMax
Reference
NACA
Basic airfoil
Clark Y
1.29 15 7.5 TN 459
.30c
Plain flap
deflected 45
o
1.95 12 4.0 TR 427
.30c
Slotted flap
deflected 45
o
1.98 12 4.0 TR 427
.30c
Slit flap
deflected 45
o
2.16 14 4.9 TN 422
.30c hinged at .80c
Split flap (zap)
deflected 45
o
2.26 13 4.43 TN 422
.30c hinged at .90c
Split flap (zap)
deflected 45
o
2.32 12.5 4.45 TN 422
.30c
Fowler flap
deflected 40
o
2.82 13 4.55 TR 534
.40c
Fowler flap
deflected 40
o
3.09 14 4.1 TR 534
Fixed slot 1.77 24 5.35 TR 427
Handley Page
automatic slot
1.04 28 4.1 TN 459
Fixed slot and
.30c plain flap
deflected 45
o
2.18 19 3.7 TR 427
Fixed slot and
.30c slotted flap
deflected 45
o
2.26 18 3.77 TR 427
Handley Page slot and
.40c Fowler flap
deflected 40
o
3.36 16 3.7 TN 459
Data taken form NACA 7 x 10 ft tunnel, wing AR=6, Re=609,000
Fig. 3.18. Effectiveness of Flaps and Slots on a Clark Y airfoil.
92
Some of the flaps have slots between the flap and the main wing and some both deflect and
extend. The Fowler flap, which deflects and extends to open a slot is seen to be the most
effective of the single flap systems, increasing C
LMax
by a factor of 2.4.
The leading edge slot and flap is also illustrated in Figure 3.18. It is seen that the
leading edge flap and slot can be very effective in increasing C
LMax
by itself and its use
with trailing edge flaps improves the performance of the wing even further.
The leading edge flap, slot of "slat" does not achieve its effectiveness through a change
in camber, because a camber change at the leading edge has very little effect; but works by
reducing the likelihood of flow separation and stall at high angles, much like an increased
leading edge radius or increased Reynolds number would. Figure 3.19 illustrates the basic
influence of the slot on an airfoils performance.
Figure 3.19. Effect of Leading Edge Slot
Figure 3.20 shows several types of leading edge devices which have been used on
wings. The first four do not incorporate slots and achieve their effect essentially by
providing an easier path for the flow to follow over the leading edge. This reduces the low
pressure peak experienced by the upper surface of the airfoil at high angles of attack since
the flow does not have to accelerate as rapidly to get around the leading edge.
Subsequently the following adverse pressure gradient is not as strong and separation is less
likely.
93
Figure 3.20. Leading Edge Devices
The other two devices shown in Figure 3.20 incorporate a slot of some type. The
leading edge flap with a slot is much more effective than one without it. The action of the
leading edge slot has often been incorrectly explained as that of a nozzle which directs high
speed air into the wing's boundary layer, "energizing" it so that it can continue on around
the wing without separating. However, an examination of the flow through the slot will
show that it is, in fact, a very low speed flow and that, instead of adding high speed air to
the flow above the wing, it slows the flow.
The slot effect is best understood if the main wing and the leading edge flap or slat are
viewed as two separate wings. If these two wings (A and B in Figure 3.21) were tested
alone at the orientation to the free stream shown, a pressure distribution similar to that
shown by the dashed lines in the plot would result. When the two are placed in proximity
to each other however, the blockage of flow through the slot slows the flow over the
bottom of wing A and the leading edge of wing B. This reduction in the velocity of the
flow has two effects. The most important effect is that by slowing the flow over the
leading edge of wing B, the low pressure peak is reduced in magnitude, thus reducing the
severity of the adverse pressure gradient which follows and delaying separation. This
means the wing can go to higher angles of attack before stall. As is always the case,
however, this benefit is not free. The solid line on the C
P
graph shows that the new
pressure distribution reduces the lift generated by the wing.
The loss of lift on wing B is more than counteracted by the increase i lift on wing A due
to the reduced velocity and hence, higher pressure below wing A. In actuality, the flow
around wing B results in an effective large positive angle of attack on wing A. The
pressure distribution on wing A thus changes as shown in Figure 3.21 and the lift on wing
A changes from negative to a large positive value.
94
The net effect of the flow over the two wings is a slotted airfoil which can go to high
angles of attack before separation and stall. In actuality, the total flow is a bit more
complicated than that just described and includes boundary layer interaction and
downstream influences. However, the essentials of the flow fit the above description.
Figure 3.21. Action of a Leading Edge Slot.
Slotted trailing edge flaps work on the same principle as that just described for the
leading edge slot. In this case the slots allow the trailing edge flaps to be deflected to very
large angles without flap stall. Modern transport aircraft which need to be able to cruise at
high speeds and land in reasonable distances often use multiple flap and slot systems such
as the one shown in Figure 3.22.
Fig. 3.22. Geometry of Leading Edge Slat and Triple Slotted Flap
95
A number of other devices exist which are intended to increase the maximum lift
coefficient of an airfoil. Most of these devices are in some way dependent on power from
the aircraft and are essentially boundary layer control devices. With non-power augmented
devices such as mechanical flaps and slats it is possible to achieve lift coefficients in the
range of 3.5 to 4.0. According to inviscid theory the upper limit on C
L
is 4 or about
12.5. Of course, this theory does not account for the effects of viscosity in retarding the
flow in the boundary layer and subsequent flow separation. By attempting to control the
boundary layer to prevent separation it is possible to achieve higher maximum lift
coefficients.
The two primary types of power augmented boundary layer control high lift devices
used have been suction and blowing. Boundary layer suction can be effective in
delaying separation on an airfoil. Suction is applied through a slot in the wing surface in
the region where the adverse pressure gradient would be likely to lead to separation. The
suction pulls away the "stale" boundary layer and, essentially a new boundary layer begins.
It is possible to roughly double C
Lmax
for an airfoil by using suction properly. The
improvement in C
Lmax
increases as the suction increases.
A certain amount of power is required to create the suction used to control the boundary
layer and this power usage must be accounted for. Since power used in a vehicle is usually
that used for propulsion to overcome drag and the use of suction for boundary layer control
must be considered as part of the total vehicle power requirement, this power is usually
treated as a drag penalty. Hence the question must always be asked whether or not the gain
in lift is worth the price paid.
Boundary layer blowing may be accomplished in several different ways and is more
common than suction as a boundary layer control device. Boundary layer control by
blowing is usually accomplished by introducing a jet through a slot such that the jet is
tangential to the boundary layer (Figure 3.23). This jet "energizes" the boundary layer by
introducing a high speed stream and by entraining fluid from outside the boundary layer.
Like suction similarly placed, boundary layer blowing on the wing's upper surface can
essentially double the C
Lmax
of the airfoil. Again, the power required for blowing must be
considered as a penalty and is usually treated as drag.
Blowing is often used to control the flow over the flaps where fluid is blown over the
flap either from a slot in the aft portion of the main airfoil or from a slot in the leading edge
of the flap itself. This can be extremely effective in increasing C
Lmax
for a wing by
preventing flow separation over the flaps at high wing angles of attack and high flap
deflection angles (Figure 3.24).
96
Fig. 3.23. Boundary Layer
Figure 3.24. Internally Blown Flaps
97
A type of blowng with sinilar effect is found in the externally flow flap (Figure 3.25)
where the jet engine or fan exhaust flows over the airfoil enhancing the normal flap, slot,
slat action to increase C
Lmax
. Engine placement is critical in this system and the exhaust
must be designed to cover as much of the wing as possible.
Many other types of boundary layer control, high lift devices exist or have been
investigated. These are too numerous to mention within the scope of this text. These
include the augmentor wing upper surface blowing, the Coanda effect, jet flaps and other
devices.
Figure 3.25. Externally Blown Flaps.
3.9 LAMINAR FLOW AIRFOILS
An examination of boundary layer behavior would show that a laminar boundary layer
causes less skin friction drag than a turbulent boundary layer; however, the turbulent
boundary layer is much better at resisting flow separation. Knowing this, NACA
researchers in the late 1930's and 1940's designed a low drag series of airfoils called
laminar flow airfoils. These airfoils, know as the NACA 6-series airfoils, were designed
to take advantage of the low skin friction of a laminar boundary layer by encouraging a
laminar flow over the first 30 to 50 percent of the airfoil surface.
In order to maintain laminar flow over a large portion of an airfoil something must be
done to prevent laminar-turbulent transition and to prevent flow separation, which occurs
rather easily in a laminar boundary layer. In the laminar flow airfoil this can be achieved at
low to moderate angles of attack by shaping the airfoil to produce a favorable pressure
gradient over the area where laminar flow is required. A favorable pressure gradient, that
is one where pressure is decreasing and flow is accelerating, has the effect of suppressing
the development of turbulence in the boundary layer. Laminar-turbulent transition in a
boundary layer is caused by the growth and merger of small scale turbulence disturbances
in the flow. The likelihood of the growth of these disturbances is spoken of in terms of
boundary layer stability and a favorable pressure gradient is a stabilizing one while an
adverse gradient is de-stabilizing.
98
The most straightforward way of creating a favorable pressure gradient on an airfoil is
to shape the wing in such a way that the flow accelerates relatively slowly over a large
portion of the wing. This is done primarily by reducing the leading edge radius to cut
down on large accelerations there, and by moving the maximum thickness of the airfoil
rearward. This will result in easier separation at high angles of attack and a lower C
Lmax
but will give a lower drag at more moderate angles of attack hence, saving fuel in a long
distance cruise condition. Figure 3 26 shows the difference in wing shape and pressure
gradient between the conventional NACA 0015 airfoil and its laminar flow counterpart, the
NACA 65
3
-015.
Figure 3.26. Conventional and Laminar Flow Airfoils
Figure 3.27 shows the result of this change in comparing an NACA 2415 airfoil with a
NACA 64
2
-415 wing. Both airfoils are 15% thickness and have the same camber,
however the latter has a region of reduced drag coefficient over a range of C
L
from 0 to
0.5. This area of reduced C
D
is known as the "drag bucket" and it is this "bucket" that is
the primary characteristic of laminar flow airfoils. It should be noted that at C
L
s above the
bucket, the drag of the laminar flow airfoil is actually higher than its conventional
counterpart because of the effect of the sharper leading edge at high , however the
reduction of drag coefficient by a factor of two in the drag bucket region may be more
important in a given wing design than the effects at higher angles of attack.
The position of the drag bucket can be changed as shown in Figure 3.28 with the first
digit in the second series of three numbers in the NACA designation referring to the value
of C
L
at the center of the drag bucket. This gives the designer an important tool, allowing
her or him to select a laminar flow airfoil which is best for his or her design. If an aircraft
is to be designed for long distance cruise and a C
L
of 0.2 is needed in cruise, the designer
can select the laminar flow airfoil which will position the drag bucket around the C
L
= 0.2
range, giving a low drag cruise and a high fuel economy in cruise. Likewise if a high
performance aircraft requires low drag during maneuvers and climbs where C
L
is high, the
drag bucket can be placed there.
99
Fig. 3.27: Drag Bucket for a Laminar Airfoil
Figure 3.28. Placement of Drag Bucket
100
Laminar flow airfoils have been used on almost all transport aircraft and on many
general aviation aircraft designed since about 1940. They can greatly reduce drag in cruise
and with proper use of flaps and other high lift devices it is still possible to achieve high
C
Lmax
values when needed for landing and takeoff. It should be noted however, that it is
possible to loose the drag bucket if sufficient dirt or roughness accumulates on the forward
part of the airfoil and, hence, such wings must be kept clean to work at their best.
3.10 SUPERCRITICAL AIRFOILS
The problem of drag rise, moment shift and lift loss during transonic flow was
discussed earlier. When the critical Mach number is reached, a shock wave forms on the
airfoil's upper surface and the flow is very likely to separate due to the large adverse
pressure gradient imposed by the shock. Anything which can be done to increase the
critical Mach number; i.e., delay the onset of the shock wave to a higher speed, will allow
higher speed subsonic flight with low drag. Hence a higher M
crit
will allow flight at
higher speed on a given amount of engine power or flight at the same speed as wings with
low M
crit
at reduced power and fuel levels.
The most obvious way to delay the onset of an upper wing surface shock is to reduce
the curvature of the upper surface in such a way that the flow does not accelerate to as high
a speed as it would with a conventional or even a laminar flow airfoil. With a "flatter"
upper surface the region of supersonic flow may be spread over a larger portion of the
airfoil and the flow does not accelerate to as high a supersonic speed. This accomplishes
two things, it delays the onset of the shock until a more aft position where any resulting
separation will affect less of the airfoil and it gives a weaker shock which is less likely to
cause separation. Because of the lower supersonic speeds over the airfoil the pressures
developed are not as low and lift due to the flow over the upper surface may be reduced
from that on a conventional airfoil. Hence, the new airfoil is designed with a large camber
created by a cusp in the lower surface at the trailing edge which creates enough lift to make
up for that lost on the upper surface. The resulting design is shown in Figure 3.29.
Figure 3.29. Supercritical Airfoils
101
The supercritical airfoil has proved to be very effective at lower speeds as well as in the
transonic regime. As of the mid 1970's supercritical airfoils were appealing on transport
designs for production in the 1980's and beyond. Low speed versions of the airfoil have
been tested on general aviation aircraft and are appearing on new models of such airplanes.
the airfoil design has an advantage of giving low drag with a relatively thick wing section
(13 to 21% thickness) and thus provides room for improved structure or fuel capacity. The
large thickness and large leading edge radius generally result in a higher C
Lmax
in low
speed applications.
The primary drawback for the supercritical airfoil design has been the large negative
pitching moment caused by the large magnitude of lift generated near its trailing edge.
Another problem has been in the manufacture of the sharp trailing edges which result from
the trailing edge cusp. It is, however, possible to design around these problems and the
supercritical airfoil is expected to be the wing used on most aircraft for the foreseeable
future.
3.11 THREE DIMENSIONAL EFFECTS
Most of the discussion in the previous sections of this chapter has dealt with two
dimensional airfoil behavior. A two dimensional airfoil is, of course, only a section or
slice of a 3-D airfoil and two dimensional airfoil aerodynamics must be considered the ideal
case. Three dimensional effects can often be thought of as simply factors which limit the
normal 2D performance of an airfoil. The two primary three dimensional factors which
affect wing performance are aspect ratio, AR, and wing sweep.
As mentioned in section 3.4 aspect ratio is a measure of the ratio of the span to the
mean chord. Aspect ratio has a significant effect on the performance of the total wing
because of wing tip losses. Ideally, the lift generated by an untapered wing would be
constant at every point along the span. However, due to flow around the wing tip there are
lift losses near the tip as shown in Figure 4.30. Since there is a lower pressure on top of
the wing than below the fluid will flow around the wingtip to the area of lower pressure.
This, therefore reduces the lift generated near the wingtip and must be considered as a 3-D
loss. This flow around the wingtip is also the source of the trailing vortex, a swirling flow
coming off of each wingtip.
The loss of lift at the tip of a 3-D wing goes inboard over some percentage of the
span. Hence, for a short stubby wing with low AR a greater percentage of the total wing
area experiences some tip loss than in a high aspect ratio wing. Therefore a high aspect
wing will produce more lift than a low aspect ratio wing of the same area and airfoil
section. The 3-D wing has a higher drag coefficient than the 2D airfoil and this additional
drag is inversely proportional to aspect ratio. The net result is that a high aspect ratio airfoil
has higher lift and lower drag than a low aspect ratio wing of the same area and airfoil
shape.
102
Figure 3.30. 3-D Airflow Effects
Wing sweep primarily affects the performance of a 3-D airfoil in the transonic flow
regime. The primary effect of sweeping the wing is to raise the critical Mach number of the
airfoil. The shock wave, which develops on an airfoil in transonic flow, is developed in
response to the component of the free stream to the line down the quarter chord of the
wing. Hence, for a given free stream velocity, the greater the wing sweep the lower will be
the component of velocity normal to the quarter chord line. It is not until this normal
component of the flow reaches the critical Mach number that the drag rise will occur and
even when it does occur the drag rise is not as great as in the unswept case. Figure 3.31
shows the effect of varymg degrees of sweep on one senes of wings.
Figure 3.31. Sweepback Effect on Drag Rise vs. Mach No.
As is the case with almost any change that is of benefit in some way a price must be
paid for the favorable effects of sweep. This price is sweep-induced cross flow tip stall.
The span-wise flow which results from the sweep can cause severe adverse pressure
gradients at the wing tips and tip stall. Severe structural as well as aerodynamic problems
can result.
103
Summary
A review of this chapter will show that almost all phenomena which occur on airfoils
can be understood in terms of simple pressure-velocity behavior and their effects on the
behavior and their effects on the behavior of the boundary layer. All that is needed for a
physical understanding of airfoil aerodynamics is an appreciation of the meaning of the
pressure-velocity relationship called Bernoullis equation. This, combined with a physical
feel for the meaning of laminar, turbulent and separated boundary layers can explain the
aerodynamic behavior of flow about any shape. Other texts will show how to take this
simple physical understanding and build it into a useful mathematical description of fluid
flows.
104
You might also like
- Stanford Aero SimDocument23 pagesStanford Aero Simjohn kasichNo ratings yet
- Chapter 3Document59 pagesChapter 3megaadjiNo ratings yet
- The Equations of Change For Isothermal SystemsDocument60 pagesThe Equations of Change For Isothermal SystemsaprfdystNo ratings yet
- Transport Phenomena Chapter 3Document62 pagesTransport Phenomena Chapter 3bima0407No ratings yet
- Fluids Ebook - Linear Momentum EquationDocument3 pagesFluids Ebook - Linear Momentum EquationYim Hoe YenNo ratings yet
- Origin of Fluid Forces ExplainedDocument212 pagesOrigin of Fluid Forces Explainedpremiitr05No ratings yet
- MM301 1 IntroductionDocument26 pagesMM301 1 IntroductionoddomancanNo ratings yet
- 3D Stress ComponentsDocument8 pages3D Stress Componentsonnly1964No ratings yet
- Capitulo 4 WhiteDocument62 pagesCapitulo 4 Whitegabo2008No ratings yet
- Lecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFDocument132 pagesLecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFvibhor28No ratings yet
- Nonlinear Aeroelastic Behavior of Flexible High-Aspect Ratio WingsDocument2 pagesNonlinear Aeroelastic Behavior of Flexible High-Aspect Ratio WingsRamaleela KannanNo ratings yet
- Navier Stokes EquationDocument20 pagesNavier Stokes EquationNaveen SapareNo ratings yet
- The Differential Equations of FlowDocument12 pagesThe Differential Equations of Flowsundari_muraliNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Complete Phy101-Note-first QuaterDocument22 pagesComplete Phy101-Note-first QuaterdxdxedddNo ratings yet
- Green's Theorem ApplicationsDocument22 pagesGreen's Theorem ApplicationsPraveen RathodNo ratings yet
- Fundamentals of Fluid Mechanics ExplainedDocument89 pagesFundamentals of Fluid Mechanics Explainedpraveen_01236No ratings yet
- Tugas 2 Hidrodinamika 1 Dosen Bapak Sujantoko ST, MTDocument17 pagesTugas 2 Hidrodinamika 1 Dosen Bapak Sujantoko ST, MTAriefNo ratings yet
- Dimensional Analysis and Hydraulic SimilarityDocument43 pagesDimensional Analysis and Hydraulic SimilarityTing Wee KietNo ratings yet
- Daniel Spirn and J. Douglas Wright - Linear Dispersive Decay Estimates For Vortex Sheets With Surface TensionDocument27 pagesDaniel Spirn and J. Douglas Wright - Linear Dispersive Decay Estimates For Vortex Sheets With Surface TensionPonmijNo ratings yet
- New Microsoft Office Word DocumentDocument33 pagesNew Microsoft Office Word DocumentArvind YelshettiNo ratings yet
- ASC-mod 3-Dynamic Longitudinal StabilityDocument32 pagesASC-mod 3-Dynamic Longitudinal StabilityJason JeevanNo ratings yet
- Lifting-Line Theory - WikipediaDocument29 pagesLifting-Line Theory - WikipediaSãröj ShâhNo ratings yet
- Fundamentals of Fluid MechanicsDocument90 pagesFundamentals of Fluid MechanicsSurendar MechNo ratings yet
- Lec 1 Aerodynamics - Fundamental Principles of AerodynamicsDocument50 pagesLec 1 Aerodynamics - Fundamental Principles of AerodynamicsFiri Derara Deresa OljiraNo ratings yet
- Introduction To Basic Principles of Fluid MechanicsDocument11 pagesIntroduction To Basic Principles of Fluid MechanicsNoureldin YosriNo ratings yet
- VII. Derivation of The Navier-Stokes Equations and SolutionsDocument20 pagesVII. Derivation of The Navier-Stokes Equations and SolutionsRiddhesh PatelNo ratings yet
- EuleDocument9 pagesEuleAnand Utsav KapoorNo ratings yet
- 1973-62 Simplified Theory of Rolling ContactDocument6 pages1973-62 Simplified Theory of Rolling ContactStefan TudoracheNo ratings yet
- Fluid MechanicsDocument41 pagesFluid MechanicsRian SteveNo ratings yet
- Reading 1Document20 pagesReading 1Hwee Peng YeoNo ratings yet
- Livro - Modern Compressible Flow (2) 81-160Document80 pagesLivro - Modern Compressible Flow (2) 81-160Antônio Jorge SesanaNo ratings yet
- WIKI Lifting-Line TheoryDocument8 pagesWIKI Lifting-Line TheoryHossam T BadranNo ratings yet
- 01-ES202 - Topic1Document18 pages01-ES202 - Topic1Moguri OwowNo ratings yet
- Ch9 Equations of Motion in A Rotating Frame and Geostrophic FlowDocument8 pagesCh9 Equations of Motion in A Rotating Frame and Geostrophic FlowGoverdhan Singh RatnawatNo ratings yet
- Anglais Technique 1 2021 2022Document13 pagesAnglais Technique 1 2021 2022Yehya BOUNABNo ratings yet
- MAE 4242 Aircraft Stability and Control Unit 1 Notes on Airfoil AerodynamicsDocument18 pagesMAE 4242 Aircraft Stability and Control Unit 1 Notes on Airfoil AerodynamicsMatthew RhoneyNo ratings yet
- Scaling Analysis Provides Insights into Fluid-Structure InteractionDocument6 pagesScaling Analysis Provides Insights into Fluid-Structure Interaction1AdityaPathania1No ratings yet
- ME582 CH 01Document13 pagesME582 CH 01Jackie HendersonNo ratings yet
- F-16 Dynamic ModelDocument19 pagesF-16 Dynamic ModelMuhammad AbdullahNo ratings yet
- Aerodynamics: Lecturer: C. W. Fan, PH.DDocument21 pagesAerodynamics: Lecturer: C. W. Fan, PH.DVasanth AradhyaNo ratings yet
- Mechanical Systems 3Document34 pagesMechanical Systems 3sidkhan1No ratings yet
- Paper On Navier-Stokes EquationsDocument11 pagesPaper On Navier-Stokes EquationsVSTomarNo ratings yet
- Statics - PresentationDocument164 pagesStatics - PresentationKorpy KorpyNo ratings yet
- 8-Chapter 3 Text 2011Document50 pages8-Chapter 3 Text 2011medievoloNo ratings yet
- Mixed multiple DOF systemsDocument13 pagesMixed multiple DOF systemspanos2244662864100% (1)
- Dimensional Analysis Handout PDFDocument10 pagesDimensional Analysis Handout PDFHafiz Mudaser AhmadNo ratings yet
- Vector and Tensor Analysis 1Document4 pagesVector and Tensor Analysis 1Meetu KaurNo ratings yet
- Rotations in QuantumDocument5 pagesRotations in QuantumShami CosineroNo ratings yet
- Dimensional Analysis and Hydraulic SimilitudeDocument9 pagesDimensional Analysis and Hydraulic SimilitudeinsaneabhayNo ratings yet
- Isotropic DefinitionDocument11 pagesIsotropic DefinitionAnaniah DuraiNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- Scientific Abbreviation and Acronym ListDocument42 pagesScientific Abbreviation and Acronym ListMahboob QureshiNo ratings yet
- Michael Steytler EPQ EssayDocument21 pagesMichael Steytler EPQ EssayMichael SteytlerNo ratings yet
- Business Spotlight Space Exploration Adv. SSDocument6 pagesBusiness Spotlight Space Exploration Adv. SSDaniel NazwiskoNo ratings yet
- VFR Navigation Standard Closing Angle TechniqueDocument9 pagesVFR Navigation Standard Closing Angle TechniqueachendkeNo ratings yet
- Spacex PDFDocument69 pagesSpacex PDFEmerovsky ReyesNo ratings yet
- UfoDocument15 pagesUfoStevan Arta RisajayaNo ratings yet
- Viasat Response To SDocument11 pagesViasat Response To Smichaelkan1No ratings yet
- GM's Mark On The MoonDocument14 pagesGM's Mark On The MoonBob AndrepontNo ratings yet
- 5600 Circuit DiagramDocument11 pages5600 Circuit DiagramPaulmankeNo ratings yet
- UAV EvolutionDocument8 pagesUAV EvolutionUAVs AustraliaNo ratings yet
- DLR PresentationDocument22 pagesDLR Presentationafeef_ziaNo ratings yet
- NASA - sp8126 - Space Vehicle Design Criteria - Glossary of Terms and Table of Conversion Factors Used in Design of Chemical Propulsion Systems PDFDocument104 pagesNASA - sp8126 - Space Vehicle Design Criteria - Glossary of Terms and Table of Conversion Factors Used in Design of Chemical Propulsion Systems PDFKhoa VũNo ratings yet
- Human Migration To MarsDocument1 pageHuman Migration To MarswatsuyajiNo ratings yet
- Elon MuskDocument7 pagesElon MuskVaranc AvetisyanNo ratings yet
- ZAERO BrochureDocument32 pagesZAERO BrochureMuhammad KusniNo ratings yet
- AI Attitude Indicator GuideDocument11 pagesAI Attitude Indicator GuideversineNo ratings yet
- Nasa-Space-Toilet-Challenge-2001010718-Article Quiz and AnswersDocument4 pagesNasa-Space-Toilet-Challenge-2001010718-Article Quiz and Answersapi-302899266No ratings yet
- Conceptual Design ReviewDocument11 pagesConceptual Design ReviewArun KumarNo ratings yet
- Introduction to Airport Components and OperationsDocument55 pagesIntroduction to Airport Components and OperationsSavitha Pradeep100% (1)
- Turn of PhraseDocument1,108 pagesTurn of Phraseanbinh4uNo ratings yet
- Satellite CommunicationDocument16 pagesSatellite CommunicationArun KumarNo ratings yet
- Quran & AstronomyDocument5 pagesQuran & Astronomynoelbaba71No ratings yet
- Winston Churchill's Views On Aliens Revealed in Lost Essay - BBC NewsDocument13 pagesWinston Churchill's Views On Aliens Revealed in Lost Essay - BBC NewsoglasifwdNo ratings yet
- Planetary AssaultDocument5 pagesPlanetary AssaultAnonymous tMbueXyNo ratings yet
- Rocket Propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument24 pagesRocket Propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, Madrasvinodtiwari808754No ratings yet
- Amos Ariny Astronomer DART MissionDocument19 pagesAmos Ariny Astronomer DART MissionDr. Amos ArinyNo ratings yet
- Vintage Airplane - Apr 1993Document36 pagesVintage Airplane - Apr 1993Aviation/Space History Library100% (1)
- Singing Rock - Distribuidor Senior 10122022Document4 pagesSinging Rock - Distribuidor Senior 10122022Pretecsi SasNo ratings yet
- AAS Wealth Yoga ReportDocument5 pagesAAS Wealth Yoga ReportshunmugathasonNo ratings yet
- Jung Et Al - AEOLUS, Wind Weighting Program and Concept For Unguided Suborbital Launch VehiclesDocument4 pagesJung Et Al - AEOLUS, Wind Weighting Program and Concept For Unguided Suborbital Launch VehiclesluizotaviocfgNo ratings yet