Synchronization in Power Networks
Florian Dorer and Francesco Bullo
Center for Control,
Dynamical Systems & Computation
University of California at Santa Barbara
http://motion.me.ucsb.edu
Institute for Energy Eciency
UC Santa Barbara
Santa Barbara, California, October 19, 2011
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 1 / 23
Motivation: the current power grid is . . .
. . . the greatest engineering achievement of the 20th century.
[National Academy of Engineering 10]
1
large-scale, complex, & rich nonlinear dynamics
2
100 years old and operating at its capacity limits
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 2 / 23
Motivation: the current power grid is . . .
. . . the greatest engineering achievement of the 20th century.
[National Academy of Engineering 10]
1
large-scale, complex, & rich nonlinear dynamics
2
100 years old and operating at its capacity limits BLACKOUTS
The Blackout of 2003: 8/15/2003
Failure Reveals Creaky System, Experts Believe
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 2 / 23
Motivation: the envisioned power grid
Energy is one of the top three national priorities
Expected developments in smart grid:
1
large number of distributed power sources
2
increasing adoption of renewables
3
sophisticated cyber-coordination layer
challenges: increasingly complex networks & stochastic disturbances
opportunity: some smart grid keywords:
control/sensing/optimization distributed/coordinated/decentralized
Central theme: understanding and taming complexity
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 3 / 23
Motivation: the envisioned power grid
Energy is one of the top three national priorities
Expected developments in smart grid:
1
large number of distributed power sources
2
increasing adoption of renewables
3
sophisticated cyber-coordination layer
challenges: increasingly complex networks & stochastic disturbances
opportunity: some smart grid keywords:
control/sensing/optimization distributed/coordinated/decentralized
Central theme: understanding and taming complexity
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 3 / 23
Motivation: the envisioned power grid our viewpoint
Projects at UCSB: power systems engineering networked control
1
detection and identication of faults & cyber-physical attacks
(together with F. Pasqualetti)
t
1
t
2
t
3
3
g
1
g
2
g
3
b
4
b
1
b
5
b
2
b
6
b
3
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
Sensors
WECC 3/9 power system system dynamics & measurement
Objectives:
Is the attack or fault detectable/identiable by measurements?
How to design (distributed) lters for detection/identication?
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 4 / 23
Motivation: the envisioned power grid our viewpoint
Projects at UCSB: power systems engineering networked control
1
detection and identication of faults & cyber-physical attacks
(together with F. Pasqualetti)
t
1
t
2
t
3
3
g
1
g
2
g
3
b
4
b
1
b
5
b
2
b
6
b
3
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
Sensors
WECC 3/9 power system system dynamics & measurement
Objectives:
Is the attack or fault detectable/identiable by measurements?
How to design (distributed) lters for detection/identication?
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 4 / 23
Motivation: the envisioned power grid our viewpoint
Projects at UCSB: power systems engineering networked control
2
Synchronization & transient stability
Generators have to swing synchronously
despite severe uctuations in generation/load
or faults in network/system components
Objectives [D. Hill & G. Chen 06]: power network dynamics
?
graph
Observations from distinct elds:
power networks are coupled oscillators
coupled oscillators sync for large coupling
graph theory quanties coupling, e.g.,
2
plausible(?): power networks sync for large
2
x
x
x
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 5 / 23
Motivation: the envisioned power grid our viewpoint
Projects at UCSB: power systems engineering networked control
2
Synchronization & transient stability
Generators have to swing synchronously
despite severe uctuations in generation/load
or faults in network/system components
Objectives [D. Hill & G. Chen 06]: power network dynamics
?
graph
Observations from distinct elds:
power networks are coupled oscillators
coupled oscillators sync for large coupling
graph theory quanties coupling, e.g.,
2
plausible(?): power networks sync for large
2
x
x
x
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 5 / 23
Motivation: the envisioned power grid our viewpoint
Projects at UCSB: power systems engineering networked control
3
Kron reduction model reduction using algebraic graph theory
2
10
30
25
8
37
29
9
38
23
7
3
6
22
6
3
5
19
4
33
20
5
34
10
3
32
6
2
3
1
1
8
7
5
4
3
18
17
26
27
28
24
21
16
15 14
13
12
11
1
3
9
9
2
30 25
37
29
38
23
3
6
22
3
5
19
33
20
34
10
32
6 3
1
1
8
7
5
4
3
18
17
26
27
28
24
21
16
15 14
13
12
11
3
9
9
10
9
7
6
4
5
3
2
1
8
15
5
12
11
10
7
8
9
4
3
1
2
17
18
14
16
19
20
21
24
26
27
28
31
32
34 33
36
38
39
22
35
6
13
30
37
25
29
23
1
10
8
2
3
6
9
4
7
5
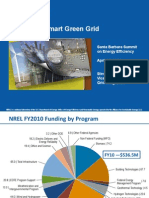
F
Fig. 9. The New England test system [10], [11]. The system includes
10 synchronous generators and 39 buses. Most of the buses have constant
active and reactive power loads. Coupled swing dynamics of 10 generators
are studied in the case that a line-to-ground fault occurs at point F near bus
16.
test system can be represented by
i
=
i
,
H
i
f
s
i
= D
i
i
+ P
mi
G
ii
E
2
i
10
j=1,j=i
E
i
E
j
{G
ij
cos(
i
j
) + B
ij
sin(
i
j
)},
(11)
where i = 2, . . . , 10.
i
is the rotor angle of generator i with
respect to bus 1, and
i
the rotor speed deviation of generator
i relative to system angular frequency (2f
s
= 2 60 Hz).
1
is constant for the above assumption. The parameters
f
s
, H
i
, P
mi
, D
i
, E
i
, G
ii
, G
ij
, and B
ij
are in per unit
system except for H
i
and D
i
in second, and for f
s
in Helz.
The mechanical input power P
mi
to generator i and the
magnitude E
i
of internal voltage in generator i are assumed
to be constant for transient stability studies [1], [2]. H
i
is
the inertia constant of generator i, D
i
its damping coefcient,
and they are constant. G
ii
is the internal conductance, and
G
ij
+ jB
ij
the transfer impedance between generators i
and j; They are the parameters which change with network
topology changes. Note that electrical loads in the test system
are modeled as passive impedance [11].
B. Numerical Experiment
Coupled swing dynamics of 10 generators in the
test system are simulated. E
i
and the initial condition
(
i
(0),
i
(0) = 0) for generator i are xed through power
ow calculation. H
i
is xed at the original values in [11].
P
mi
and constant power loads are assumed to be 50% at their
ratings [22]. The damping D
i
is 0.005 s for all generators.
G
ii
, G
ij
, and B
ij
are also based on the original line data
in [11] and the power ow calculation. It is assumed that
the test system is in a steady operating condition at t = 0 s,
that a line-to-ground fault occurs at point F near bus 16 at
t = 1 s20/(60 Hz), and that line 1617 trips at t = 1 s. The
fault duration is 20 cycles of a 60-Hz sine wave. The fault
is simulated by adding a small impedance (10
7
j) between
bus 16 and ground. Fig. 10 shows coupled swings of rotor
angle
i
in the test system. The gure indicates that all rotor
angles start to grow coherently at about 8 s. The coherent
growing is global instability.
C. Remarks
It was conrmed that the system (11) in the New Eng-
land test system shows global instability. A few comments
0 2 4 6 8 10
-5
0
5
10
15
i
/
r
a
d
10
02
03
04
05
0 2 4 6 8 10
-5
0
5
10
15
i
/
r
a
d
TIME / s
06
07
08
09
Fig. 10. Coupled swing of phase angle i in New England test system.
The fault duration is 20 cycles of a 60-Hz sine wave. The result is obtained
by numerical integration of eqs. (11).
are provided to discuss whether the instability in Fig. 10
occurs in the corresponding real power system. First, the
classical model with constant voltage behind impedance is
used for rst swing criterion of transient stability [1]. This is
because second and multi swings may be affected by voltage
uctuations, damping effects, controllers such as AVR, PSS,
and governor. Second, the fault durations, which we xed at
20 cycles, are normally less than 10 cycles. Last, the load
condition used above is different from the original one in
[11]. We cannot hence argue that global instability occurs in
the real system. Analysis, however, does show a possibility
of global instability in real power systems.
IV. TOWARDS A CONTROL FOR GLOBAL SWING
INSTABILITY
Global instability is related to the undesirable phenomenon
that should be avoided by control. We introduce a key
mechanism for the control problem and discuss control
strategies for preventing or avoiding the instability.
A. Internal Resonance as Another Mechanism
Inspired by [12], we here describe the global instability
with dynamical systems theory close to internal resonance
[23], [24]. Consider collective dynamics in the system (5).
For the system (5) with small parameters p
m
and b, the set
{(, ) S
1
R | = 0} of states in the phase plane is
called resonant surface [23], and its neighborhood resonant
band. The phase plane is decomposed into the two parts:
resonant band and high-energy zone outside of it. Here the
initial conditions of local and mode disturbances in Sec. II
indeed exist inside the resonant band. The collective motion
before the onset of coherent growing is trapped near the
resonant band. On the other hand, after the coherent growing,
it escapes from the resonant band as shown in Figs. 3(b),
4(b), 5, and 8(b) and (c). The trapped motion is almost
integrable and is regarded as a captured state in resonance
[23]. At a moment, the integrable motion may be interrupted
by small kicks that happen during the resonant band. That is,
the so-called release from resonance [23] happens, and the
collective motion crosses the homoclinic orbit in Figs. 3(b),
4(b), 5, and 8(b) and (c), and hence it goes away from
the resonant band. It is therefore said that global instability
47th EEE CDC, Cancun, Mexico, Dec. 9-11, 2008 WeA18.4
2491
Authorized licensed use limited to: Univ of Calif Santa Barbara. Downloaded on June 10, 2009 at 14:48 from IEEE Xplore. Restrictions apply.
New England power grid graph equivalent reduced grid
Objectives: How are the two electrically-equivalent networks related in
terms of graph topology, spectrum, resistance, . . . ?
Applications of Kron reduction in smart grid problems?
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 6 / 23
Summary of activities of last 2 years
Research Areas: power systems engineering networked control
1
synchronization and transient stability
2
detection and identication of faults and cyber-physical attacks
3
model reduction and scalability
Academics
Education: PhD students Florian Dorer and Fabio Pasqualetti
Publications: 3 journal articles (SIAM & IFAC), 9 conference articles
Awards: two plenaries, two best paper awards
2011-14 NSF project Cyber-Physical Challenges of Transient
Stability and Security in Power Grids.
NSF CyperPhysical Systems and Trustworthy Computing Programs
Collaboration with Ian Dobson (Wisconsin) and Bruno Sinopoli (CMU)
Collaboration with Los Alamos National Lab, DOE project
Optimization and Control Theory for Smart Grids, Misha Chertkov
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 7 / 23
Summary of activities of last 2 years
Research Areas: power systems engineering networked control
1
synchronization and transient stability
2
detection and identication of faults and cyber-physical attacks
3
model reduction and scalability
Academics
Education: PhD students Florian Dorer and Fabio Pasqualetti
Publications: 3 journal articles (SIAM & IFAC), 9 conference articles
Awards: two plenaries, two best paper awards
2011-14 NSF project Cyber-Physical Challenges of Transient
Stability and Security in Power Grids.
NSF CyperPhysical Systems and Trustworthy Computing Programs
Collaboration with Ian Dobson (Wisconsin) and Bruno Sinopoli (CMU)
Collaboration with Los Alamos National Lab, DOE project
Optimization and Control Theory for Smart Grids, Misha Chertkov
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 7 / 23
Outline
1
Introduction and Motivation
2
Mathematical Modeling & Synchronization Problem
3
Synchronization in the Kuramoto Model
4
From the Kuramoto Model to the Power Network Model
5
Conclusions
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 7 / 23
Structure-preserving power network model
New England Power Grid
15
5
12
11
10
7
8
9
4
3
1
2
17
18
14
16
19
20
21
24
26
27
28
31
32
34 33
36
38
39
22
35
6
13
30
37
25
29
23
1
10
8
2
3
6
9
4
7
5
F
Fig. 9. The New England test system [10], [11]. The system includes
10 synchronous generators and 39 buses. Most of the buses have constant
active and reactive power loads. Coupled swing dynamics of 10 generators
are studied in the case that a line-to-ground fault occurs at point F near bus
16.
test system can be represented by
i
=
i
,
H
i
f
s
i
= D
i
i
+ P
mi
G
ii
E
2
i
10
j=1,j=i
E
i
E
j
{G
ij
cos(
i
j
) + B
ij
sin(
i
j
)},
(11)
where i = 2, . . . , 10.
i
is the rotor angle of generator i with
respect to bus 1, and
i
the rotor speed deviation of generator
i relative to system angular frequency (2f
s
= 2 60 Hz).
1
is constant for the above assumption. The parameters
f
s
, H
i
, P
mi
, D
i
, E
i
, G
ii
, G
ij
, and B
ij
are in per unit
system except for H
i
and D
i
in second, and for f
s
in Helz.
The mechanical input power P
mi
to generator i and the
magnitude E
i
of internal voltage in generator i are assumed
to be constant for transient stability studies [1], [2]. H
i
is
the inertia constant of generator i, D
i
its damping coefcient,
and they are constant. G
ii
is the internal conductance, and
G
ij
+ jB
ij
the transfer impedance between generators i
and j; They are the parameters which change with network
topology changes. Note that electrical loads in the test system
are modeled as passive impedance [11].
B. Numerical Experiment
Coupled swing dynamics of 10 generators in the
test system are simulated. E
i
and the initial condition
(
i
(0),
i
(0) = 0) for generator i are xed through power
ow calculation. H
i
is xed at the original values in [11].
P
mi
and constant power loads are assumed to be 50% at their
ratings [22]. The damping D
i
is 0.005 s for all generators.
G
ii
, G
ij
, and B
ij
are also based on the original line data
in [11] and the power ow calculation. It is assumed that
the test system is in a steady operating condition at t = 0 s,
that a line-to-ground fault occurs at point F near bus 16 at
t = 1 s20/(60 Hz), and that line 1617 trips at t = 1 s. The
fault duration is 20 cycles of a 60-Hz sine wave. The fault
is simulated by adding a small impedance (10
7
j) between
bus 16 and ground. Fig. 10 shows coupled swings of rotor
angle
i
in the test system. The gure indicates that all rotor
angles start to grow coherently at about 8 s. The coherent
growing is global instability.
C. Remarks
It was conrmed that the system (11) in the New Eng-
land test system shows global instability. A few comments
0 2 4 6 8 10
-5
0
5
10
15
i
/
r
a
d
10
02
03
04
05
0 2 4 6 8 10
-5
0
5
10
15
i
/
r
a
d
TIME / s
06
07
08
09
Fig. 10. Coupled swing of phase angle
i
in New England test system.
The fault duration is 20 cycles of a 60-Hz sine wave. The result is obtained
by numerical integration of eqs. (11).
are provided to discuss whether the instability in Fig. 10
occurs in the corresponding real power system. First, the
classical model with constant voltage behind impedance is
used for rst swing criterion of transient stability [1]. This is
because second and multi swings may be affected by voltage
uctuations, damping effects, controllers such as AVR, PSS,
and governor. Second, the fault durations, which we xed at
20 cycles, are normally less than 10 cycles. Last, the load
condition used above is different from the original one in
[11]. We cannot hence argue that global instability occurs in
the real system. Analysis, however, does show a possibility
of global instability in real power systems.
IV. TOWARDS A CONTROL FOR GLOBAL SWING
INSTABILITY
Global instability is related to the undesirable phenomenon
that should be avoided by control. We introduce a key
mechanism for the control problem and discuss control
strategies for preventing or avoiding the instability.
A. Internal Resonance as Another Mechanism
Inspired by [12], we here describe the global instability
with dynamical systems theory close to internal resonance
[23], [24]. Consider collective dynamics in the system (5).
For the system (5) with small parameters p
m
and b, the set
{(, ) S
1
R | = 0} of states in the phase plane is
called resonant surface [23], and its neighborhood resonant
band. The phase plane is decomposed into the two parts:
resonant band and high-energy zone outside of it. Here the
initial conditions of local and mode disturbances in Sec. II
indeed exist inside the resonant band. The collective motion
before the onset of coherent growing is trapped near the
resonant band. On the other hand, after the coherent growing,
it escapes from the resonant band as shown in Figs. 3(b),
4(b), 5, and 8(b) and (c). The trapped motion is almost
integrable and is regarded as a captured state in resonance
[23]. At a moment, the integrable motion may be interrupted
by small kicks that happen during the resonant band. That is,
the so-called release from resonance [23] happens, and the
collective motion crosses the homoclinic orbit in Figs. 3(b),
4(b), 5, and 8(b) and (c), and hence it goes away from
the resonant band. It is therefore said that global instability
47th EEE CDC, Cancun, Mexico, Dec. 9-11, 2008 WeA18.4
2491
Authorized licensed use limited to: Univ of Calif Santa Barbara. Downloaded on June 10, 2009 at 14:48 from IEEE Xplore. Restrictions apply.
2
1
0
3
0
25
8
37
29
9
3
8
23
7
3
6
22
6
3
5
19
4
3
3
20
5
34
10
3
3
2
6
2
3
1
1
8
7
5
4
3
18
17
26
27
28
24
21
16
15 14
13
12
11
1
3
9
9
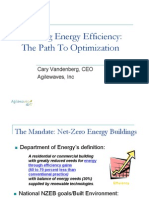
Power network topology:
1
n generators , each connected to a bus
2
m buses form a connected graph
3
admittance matrix Y
network
C
(n+m)(n+m)
characterizes the network
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 8 / 23
Structure-preserving power network model
1
n generators :
modeled by dynamic swing equations:
M
i
i
+ D
i
i
= P
mech.in,i
P
electr.out,i
2
10
30
25
8
37
29
9
38
23
7
3
6
22
6
3
5
19
4
33
20
5
34
10
3
32
6
2
3
1
1
8
7
5
4
3
18
17
26
27
28
24
21
16
15 14
13
12
11
1
3
9
9
2
m buses :
load model: constant real power demand
& linear frequency dependence
D
i
i
+ P
load,i
=
n+m
j =1
|V
i
| |V
j
| |Y
ij
| sin
i
j
Y
jk
Y
ik
D
k
k
P
load,k
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 9 / 23
Structure-preserving power network model
Classic structure-preserving model [A.R. Bergen & D. Hill 81]:
M
i
i
+ D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n}
D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {n + 1, . . . m}
P
ij
= |V
i
| |V
j
| |Y
ij
| 0 max. power transferred i j
P
i
=
P
mech.in,i
for i {1, . . . , n}
P
load,i
for i {n + 1, . . . m}
real power injection at i
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 10 / 23
Synchronization and transient stability
M
i
i
+ D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n}
D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {n + 1, . . . m}
1
General synchronization problem: |
i
j
| bounded &
i
=
j
2
Classic analysis methods: Assumptions & Hamiltonian arguments
highly developed eld based on global system perspective
Open Problem [D. Hill & G. Chen 06]:
synchronization in power networks
?
underlying graph properties
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 11 / 23
Detour: Synchronization of coupled oscillators
It all began with two pendulum clocks and the
observation of an odd kind of sympathy .
[Huygens, C. Horologium Oscillatorium, 1673]
Todays canonical coupled oscillator model
[A. Winfree 67, Y. Kuramoto 75]
Kuramoto model of coupled oscillators:
i
=
i
K
n
n
j =1
sin(
i
j
)
n oscillators with phase
i
S
1
non-identical natural frequencies
i
R
1
elastic coupling with strength K/n
x
x
x
1
2
S
1
K/n
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 12 / 23
Detour: Synchronization of coupled oscillators
Kuramoto model of coupled oscillators:
i
=
i
K
n
n
j =1
sin(
i
j
)
Just a few of various direct & related applications:
Sync of coupled pendulum clocks [C. Huygens XVII, M. Bennet et. al 02]
Sync in Josephson junctions [S. Watanabe et. al 97, K. Wiesenfeld et al. 98]
Sync in a population of reies [G.B. Ermentrout 90, Y. Zhou et al. 06]
Deep-brain stimulation and neuroscience
[P.A. Tass 03, E. Brown et al. 04]
Coordination of particle models
[R. Sepulchre et al. 07, D. Klein et al. 09]
Countless other technological, biological, & social sync
phenomena [A. Winfree 67, S.H. Strogatz 00, J. Acebr on 01]
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 13 / 23
Detour: Synchronization of coupled oscillators
A well-understood linear synchronization
model [M. DeGroot 74, J. Tsitsiklis 84,. . . ]
Consensus protocol:
x
i
=
n
j =1
a
ij
(x
i
x
j
)
n identical agents with state variable x
i
R
interaction described by a connected graph with weights a
ij
a few applications: robotic coordination, sensor networks, distributed
computation & optimization, continuous Markov chains, . . .
R
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 14 / 23
The big picture
Consensus protocols: Kuramoto oscillators:
?
Open problem: sync in power networks
state, parameters, and topology of graph
i
=
i
n
j=1
K
n
sin(
i
j
)
M
i
i
+D
i
i
= P
i
n
j=1
P
ij
sin(
i
j
)
x
i
=
n
j=1
a
ij
(x
i
x
j
)
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 15 / 23
The big picture
Consensus protocols: Kuramoto oscillators:
?
Open problem: sync in power networks
state, parameters, and topology of graph
i
=
i
n
j=1
K
n
sin(
i
j
)
M
i
i
+D
i
i
= P
i
n
j=1
P
ij
sin(
i
j
)
x
i
=
n
j=1
a
ij
(x
i
x
j
)
Previous observations about this connection:
Power systems: [D. Subbarao et al., 01, G. Filatrella et al., 08, V. Fioriti et al., 09]
Networked control: [D. Hill et al., 06, M. Arcak, 07]
Dynamical systems: [H. Tanaka et al., 97, A. Arenas 08]
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 15 / 23
Outline
1
Introduction and Motivation
2
Mathematical Modeling & Synchronization Problem
3
Synchronization in the Kuramoto Model
4
From the Kuramoto Model to the Power Network Model
5
Conclusions
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 15 / 23
Synchronization in the Kuramoto Model
Classic Homogeneous Kuramoto model
i
=
i
K
n
n
j =1
sin(
i
j
)
Notions of synchronization:
1
phase cohesiveness: |
i
(t)
j
(t)| bounded
2
frequency synchronization:
i
(t) =
j
(t)
Classic intuition:
K small & |
i
j
| large
incoherence & no sync
K large & |
i
j
| small
cohesiveness & frequency sync
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 16 / 23
Synchronization in the Kuramoto Model
Classic homogeneous Kuramoto model:
i
=
i
K
n
n
j =1
sin(
i
j
)
Necessary and sucient condition [F. Dorer & F. Bullo 10]
The following two statements are equivalent:
1
Coupling dominates non-uniformity, i.e., K > K
critical
max
min
.
2
The Kuramoto model achieves phase cohesiveness & exponential
frequency synchronization for all
i
[
min
,
max
].
Some consequences:
1) phase cohesiveness depends on ratio K/K
critical
2) frequency synchronization to average
sync
=
n
i =1
i
/n
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 17 / 23
Synchronization in the Kuramoto Model
Topological Kuramoto model
i
=
i
n
j =1
a
ij
sin(
i
j
)
Assume: coupling graph is
undirected and connected
x
x
x
2
a
12
a
13
a
23
S
1
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 18 / 23
Synchronization in the Kuramoto Model
Topological Kuramoto model
i
=
i
n
j =1
a
ij
sin(
i
j
)
Assume: coupling graph is
undirected and connected
1
Necessary conditions: no sync if
n
j =1
a
ij
n
k=1
k
n
2
Various sucient conditions in the literature [F. Dorer & F. Bullo, 09]:
Based on algebraic connectivity:
2
>
2
, . . .
2
3
Under development are exact conditions for synchronization
implication: coupling dominates non-uniformity sync
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 18 / 23
Synchronization in the Kuramoto Model
Topological Kuramoto model
i
=
i
n
j =1
a
ij
sin(
i
j
)
Assume: coupling graph is
undirected and connected
1
Necessary conditions: no sync if
n
j =1
a
ij
n
k=1
k
n
2
Various sucient conditions in the literature [F. Dorer & F. Bullo, 09]:
Based on algebraic connectivity:
2
>
2
, . . .
2
3
Under development are exact conditions for synchronization
implication: coupling dominates non-uniformity sync
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 18 / 23
Synchronization in the Kuramoto Model
Topological Kuramoto model
i
=
i
n
j =1
a
ij
sin(
i
j
)
Assume: coupling graph is
undirected and connected
1
Necessary conditions: no sync if
n
j =1
a
ij
n
k=1
k
n
2
Various sucient conditions in the literature [F. Dorer & F. Bullo, 09]:
Based on algebraic connectivity:
2
>
2
, . . .
2
3
Under development are exact conditions for synchronization
implication: coupling dominates non-uniformity sync
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 18 / 23
Outline
1
Introduction and Motivation
2
Mathematical Modeling & Synchronization Problem
3
Synchronization in the Kuramoto Model
4
From the Kuramoto Model to the Power Network Model
5
Conclusions
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 18 / 23
From the Kuramoto Model to the Power Network Model
1) Structure-preserving power network model on T
n+m
R
n
:
M
i
i
+ D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n}
D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {n + 1, . . . m}
2) Non-uniform variation of Kuramoto model on T
n+m
:
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n + m}
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 19 / 23
From the Kuramoto Model to the Power Network Model
1) Structure-preserving power network model on T
n+m
R
n
:
M
i
i
+ D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n}
D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {n + 1, . . . m}
2) Non-uniform variation of Kuramoto model on T
n+m
:
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n + m}
Synchronization conditions can be related via
1
extension of 1
st
-order analysis [D. Koditschek 88, Y.P. Choi et al. 10]
2
time scale separation analysis [F. D orer & F. Bullo 09]
3
today: local topological equivalence [F. D orer & F. Bullo 11]
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 19 / 23
From the Kuramoto Model to the Power Network Model
near the equilibrium manifolds 1) synchronizes 2) synchronizes
near the equilibrium manifolds 1) & 2) are topologically conjugate
22 F. Dorer and F. Bullo
0.5 1 1.5
0.5
0
0.5
(t)
(
t
)
0.5 1 1.5
0.5
0
0.5
(t)
(
t
)
(t) [rad] (t) [rad]
(
t
)
[
r
a
d
/
s
]
(
t
)
[
r
a
d
/
s
]
Fig. 5.1. Phase space plot of a network of n = 4 second-order Kuramoto oscillators (1.3) with
n = m (left plot) and the corresponding rst-order scaled Kuramoto oscillators (5.8) together with
the scaled frequency dynamics (5.9) (right plot). The natural frequencies
i
, damping terms D
i
,
and coupling strength K are such that
sync
= 0 and K/K
critical
= 1.1. From the same initial
conguration (0) (denoted by ) both rst and second-order oscillators converge exponentially to
the same nearby phase-locked equilibria (denoted by ) as predicted by Theorems 5.1 and 5.3.
(
,0
(t), 0
m1
). Hence, the phase-synchronized orbit (
,0
(t), 0
m1
), understood as
a geometric object in T
n
R
m
, constitutes a one-dimensional equilibrium manifold of
the multi-rate Kuramoto model (5.11). After factoring out the translational invari-
ance of the angular variable , the exponentially-synchronized orbit (
,0
(t), 0
m1
)
corresponds to an isolated equilibrium of (5.11) in the quotient space T
n
\ S
1
R
m
.
Since an isolated equilibrium of a smooth nonlinear system with bounded and Lips-
chitz Jacobian is exponentially stable if and only if the Jacobian is a Hurwitz matrix
[30, Theorem 4.15], the locally exponentially stable orbit (
,0
(t), 0
m1
) must be
hyperbolic in the quotient space T
n
\ S
1
R
m
. Therefore, the equilibrium trajec-
tory (
,0
(t), 0
m1
) is exponentially stable in T
n
R
m
if and only if the Jacobian of
(5.11) evaluated along (
,0
(t), 0
m1
), has n +m1 stable eigenvalues and one zero
eigenvalue corresponding to the translational invariance in S
1
.
By an analogous reasoning we reach the same conclusion for the rst-order multi-
rate Kuramoto model (5.6) (formulated in a rotating frame with frequency
sync
)
and for the scaled Kuramoto model (5.8): the exponentially-synchronized trajectory
,0
(t) T
n
is exponentially stable if and only if the Jacobian of (5.8) evaluated
along
,0
(t) has n 1 stable eigenvalues and one zero eigenvalue. Finally, recall
that the multi-rate Kuramoto model (5.11), its rst-order variant (5.6) together with
frequency dynamics (5.7) (in a rotating frame), and the scaled Kuramoto model (5.8)
together with scaled frequency dynamics (5.9) are all instances of the parameterized
system (5.1). Therefore, by Theorem 5.1, the corresponding Jacobians have the same
inertia and local exponential stability of one system implies local exponential stability
of the other system. This concludes the proof of the equivalences (i) (ii) (iii).
We now prove the nal conjugacy statement. By the generalized Hartman-
Grobman theorem [17, Theorem 6], the trajectories of the three vector elds (5.11),
(5.6)-(5.7) (formulated in a rotating frame), and (5.8)-(5.9) are locally topologically
conjugate to the ow generated by their respective linearized vector elds (locally
near (
,0
(t), 0
m1
). Since the three vector elds (5.11), (5.6)-(5.7), and (5.8)-(5.9)
are hyperbolic with respect to (
,0
(t), 0
m1
) and their respective Jacobians have the
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 20 / 23
Main Synchronization Results
Structure-preserving power network model:
M
i
i
+ D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n}
D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {n + 1, . . . m}
1
necessary condition: Let
sync
=
k
P
k
/
k
D
k
, then
n+m
j =1
P
ij
|P
i
D
i
sync
| no sync
2
sucient condition: Let
P
i
= P
i
D
i
sync
, then
2
>
P
1
P
2
, . . .
2
sync
3
conjectured exact conditions are under development
bottom line: coupling dominates imbalance in active power
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 21 / 23
Main Synchronization Results
Structure-preserving power network model:
M
i
i
+ D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n}
D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {n + 1, . . . m}
1
necessary condition: Let
sync
=
k
P
k
/
k
D
k
, then
n+m
j =1
P
ij
|P
i
D
i
sync
| no sync
2
sucient condition: Let
P
i
= P
i
D
i
sync
, then
2
>
P
1
P
2
, . . .
2
sync
3
conjectured exact conditions are under development
bottom line: coupling dominates imbalance in active power
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 21 / 23
Main Synchronization Results
Structure-preserving power network model:
M
i
i
+ D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {1, . . . , n}
D
i
i
= P
i
n+m
j =1
P
ij
sin(
i
j
) , i {n + 1, . . . m}
1
necessary condition: Let
sync
=
k
P
k
/
k
D
k
, then
n+m
j =1
P
ij
|P
i
D
i
sync
| no sync
2
sucient condition: Let
P
i
= P
i
D
i
sync
, then
2
>
P
1
P
2
, . . .
2
sync
3
conjectured exact conditions are under development
bottom line: coupling dominates imbalance in active power
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 21 / 23
Main Synchronization Results
Illustration with the IEEE Reliability Test System 96 under severe loading
220
309
310
120
103
209
102 102
118
307
302
216
202
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 22 / 23
Main Synchronization Results
Illustration with the IEEE Reliability Test System 96 under severe loading
t [s]
|
i
(
t
)
j
(
t
)
|
[
r
a
d
]
min
t [s] t [s]
i
(
t
)
[
r
a
d
/
s
]
i
(
t
)
[
r
a
d
]
i
(t)
(t)
i
D
i
sync
Conjectured Kuramoto sync condition is marginally satised
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 22 / 23
Main Synchronization Results
Illustration with the IEEE Reliability Test System 96 under severe loading
|
i
(
t
)
j
(
t
)
|
[
r
a
d
]
/2
t [s] t [s]
i
(
t
)
[
r
a
d
/
s
]
i
(
t
)
[
r
a
d
]
50 s
7 rad
50 s
3 rad/s
3 rad/s
15 rad
10 rad 50 s
t [s]
Conjectured Kuramoto sync condition is marginally not satised
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 22 / 23
Outline
1
Introduction and Motivation
2
Mathematical Modeling & Synchronization Problem
3
Synchronization in the Kuramoto Model
4
From the Kuramoto Model to the Power Network Model
5
Conclusions
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 22 / 23
Conclusions
Structure-preserving
power system model
2
30 25
37
29
38
23
36
22
35
19
33
20
34
10
32
6 31
1
8
7
5
4
3
18
17
26
27
28
24
21
16
15 14
13
12
11
39
9
10
9
7
6
4
5
3
2
1
8
Network-reduced
power system model
Kron
reduction
Consensus
protocols
& robotic
coordination
Coupled
Kuramoto
oscillators
Open problem: sync in power networks
state, parameters, and topology of graph
rst principle
modeling
mathematical
analysis
graph
theory
X
2
10
30 25
8
37
29
9
38
23
7
36
22
6
35
19
4
33 20
5
34
10
3
32
6
2
31
1
8
7
5
4
3
18
17
26
27
28
24
21
16
15 14
13
12
11
1
39
9
Ambitious workplan: sharpest conditions for most realistic models
from synchronization analysis to control design
F. Dorer & F. Bullo (UCSB) Synchronization in Power Networks Inst. for Energy Eciency 23 / 23
You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Crabtree Sustainable Energy Challenge UCSBDocument21 pagesCrabtree Sustainable Energy Challenge UCSBMikaela MennenNo ratings yet
- Theogarajan SlidesDocument78 pagesTheogarajan SlidesMikaela MennenNo ratings yet
- Brent Constantz Presentation - IEEDocument100 pagesBrent Constantz Presentation - IEEMikaela MennenNo ratings yet
- From Innovation To Commercialization - The Story of Solar CellsDocument43 pagesFrom Innovation To Commercialization - The Story of Solar CellsMikaela MennenNo ratings yet
- 21 MoortgatDocument16 pages21 MoortgatMikaela MennenNo ratings yet
- Electric Vehicle Technology Roadmap and Grid Integration: April 27th, 2011 JB Straubel CTO/Co-FounderDocument24 pagesElectric Vehicle Technology Roadmap and Grid Integration: April 27th, 2011 JB Straubel CTO/Co-FounderMikaela MennenNo ratings yet
- Santa Barbara Summit On Energy E Ciency: Jim DehlsenDocument18 pagesSanta Barbara Summit On Energy E Ciency: Jim DehlsenMikaela MennenNo ratings yet
- The Importance of Building Energy Efficiency Research/Practice For Hong KongDocument17 pagesThe Importance of Building Energy Efficiency Research/Practice For Hong KongMikaela MennenNo ratings yet
- Biologically Inspired High-Power BatteriesDocument19 pagesBiologically Inspired High-Power BatteriesMikaela MennenNo ratings yet
- Building A Smart Green Grid: Santa Barbara Summit On Energy Efficiency April 26, 2001Document23 pagesBuilding A Smart Green Grid: Santa Barbara Summit On Energy Efficiency April 26, 2001Mikaela MennenNo ratings yet
- Dynamic Monitoring and Decision Systems (DYMONDS) For Sustainable Energy ServicesDocument45 pagesDynamic Monitoring and Decision Systems (DYMONDS) For Sustainable Energy ServicesMikaela MennenNo ratings yet
- Auston SBSEE10Document13 pagesAuston SBSEE10Mikaela MennenNo ratings yet
- New Ideas in Energy Efficiency John Bowers: UC Santa BarbaraDocument25 pagesNew Ideas in Energy Efficiency John Bowers: UC Santa BarbaraMikaela MennenNo ratings yet
- Energy Efficiency at Extreme Scales: Kathy Yelick NERSC DirectorDocument32 pagesEnergy Efficiency at Extreme Scales: Kathy Yelick NERSC DirectorMikaela MennenNo ratings yet
- Eucalyptus: An Open-Source Infrastructure For Cloud ComputingDocument11 pagesEucalyptus: An Open-Source Infrastructure For Cloud ComputingMikaela MennenNo ratings yet
- Building Energy Efficiency: The Path To Optimization: Cary Vandenberg, CEO Agilewaves, IncDocument11 pagesBuilding Energy Efficiency: The Path To Optimization: Cary Vandenberg, CEO Agilewaves, IncMikaela MennenNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Newton's Law of Universal GravitationDocument9 pagesNewton's Law of Universal GravitationSanNo ratings yet
- Concrete Box Sections Under Biaxial BendDocument4 pagesConcrete Box Sections Under Biaxial Bendwing444No ratings yet
- Prestressed Concrete Structures: Prepared By: Dr. Amlan K. Sengupta Dr. Devdas MenonDocument11 pagesPrestressed Concrete Structures: Prepared By: Dr. Amlan K. Sengupta Dr. Devdas MenonJeffrey Carlo Viduya AgliamNo ratings yet
- Molecular Mechanics 2018Document3 pagesMolecular Mechanics 2018calebNo ratings yet
- NEMO Ocean Engine: Gurvan Madec, and The NEMO TeamDocument332 pagesNEMO Ocean Engine: Gurvan Madec, and The NEMO TeamMohab ShalabiNo ratings yet
- Minimising Crack Control Reinforcement - Design BookletDocument21 pagesMinimising Crack Control Reinforcement - Design BookletNitish Ramdawor100% (1)
- 6CCP3212 Statistical Mechanics Homework 2Document4 pages6CCP3212 Statistical Mechanics Homework 2Hameed ul haqNo ratings yet
- PLAXIS - 2D - CEV21 - Tutorial - 04 - Settlements Due To Tunnel ConstructionDocument16 pagesPLAXIS - 2D - CEV21 - Tutorial - 04 - Settlements Due To Tunnel ConstructionjayawiadnyanaNo ratings yet
- Zimbabwe School Examinations Council Mathematics 9164/3: General Certificate of Education Advanced LevelDocument8 pagesZimbabwe School Examinations Council Mathematics 9164/3: General Certificate of Education Advanced LevelEmily NcubeNo ratings yet
- Midterm Examination in Physics 101Document7 pagesMidterm Examination in Physics 101Ires YuloNo ratings yet
- Rectangular Hollow Plate-Fine Analysis-1Document14 pagesRectangular Hollow Plate-Fine Analysis-1Francisco UribeNo ratings yet
- Session 1 2Document10 pagesSession 1 2Mix-Kat ZiakaNo ratings yet
- Validation-Triaxial Test With Hardening Soil Model (2015)Document4 pagesValidation-Triaxial Test With Hardening Soil Model (2015)Geeta JiraliNo ratings yet
- Phy212 CH14 Worksheet-W07-KeyDocument5 pagesPhy212 CH14 Worksheet-W07-Keyangelyn tiongcoNo ratings yet
- ch2 S College PDFDocument20 pagesch2 S College PDFmohammed elobideNo ratings yet
- Compressible Fluids: 2004 Faith A. Morrison, All Rights ReservedDocument5 pagesCompressible Fluids: 2004 Faith A. Morrison, All Rights ReservedcoffewhoreNo ratings yet
- Fluid Mechanics (Hydrostatics)Document11 pagesFluid Mechanics (Hydrostatics)Derrick Ramos100% (1)
- Material Science and Testing Lab MANUALDocument33 pagesMaterial Science and Testing Lab MANUALAtul Gaur75% (4)
- BeerVM11e PPT Ch12Document70 pagesBeerVM11e PPT Ch12brayanNo ratings yet
- IJNN Volume 11 Issue 4 Pages 241-248Document8 pagesIJNN Volume 11 Issue 4 Pages 241-248SanjuNo ratings yet
- Dark Energy and MatterDocument6 pagesDark Energy and MatterLallu PrathapanNo ratings yet
- 2018 - 10 - Assistant Engineer (Mechanical) - Fnalanswerkey - Withquestion PDFDocument18 pages2018 - 10 - Assistant Engineer (Mechanical) - Fnalanswerkey - Withquestion PDFvjtiitNo ratings yet
- M-Caps-04: Physics M-Caps-04: Physics M-Caps-04: Physics M-Caps-04: Physics M-Caps-04: PhysicsDocument5 pagesM-Caps-04: Physics M-Caps-04: Physics M-Caps-04: Physics M-Caps-04: Physics M-Caps-04: PhysicsJeel KadiaNo ratings yet
- Electrostatic Sheet ObjDocument16 pagesElectrostatic Sheet ObjMP12No ratings yet
- Simulation Investigation - Youngs Double Slit ExpDocument4 pagesSimulation Investigation - Youngs Double Slit ExppixelhoboNo ratings yet
- Xi Physics - Sqp-Set 3Document3 pagesXi Physics - Sqp-Set 3Ben TenNo ratings yet
- Interpretation and Analysis of Hydraulic Fracture Pressures F. Guo N.R. Morgenstern J.D. ScottDocument6 pagesInterpretation and Analysis of Hydraulic Fracture Pressures F. Guo N.R. Morgenstern J.D. ScottEdwin TapiasNo ratings yet
- Solution Manual 3rd Ed. Metal Forming: Mechanics and Metallurgy CHAPTER 1-3Document11 pagesSolution Manual 3rd Ed. Metal Forming: Mechanics and Metallurgy CHAPTER 1-3Nadia Zukry83% (6)
- Thermodynamics Tutorial 1Document4 pagesThermodynamics Tutorial 1hellothereNo ratings yet