You might also like
- Safety of PeopleDocument40 pagesSafety of PeopleSuryavenkat RaghavanNo ratings yet
- Application FormDocument1 pageApplication FormSuneelKumarNo ratings yet
- DC and Synchronous Machines Course OutlineDocument3 pagesDC and Synchronous Machines Course OutlineAhas AlqNo ratings yet
- Quizzes 30 % Exam 1 30 % Final Exam 40 %Document1 pageQuizzes 30 % Exam 1 30 % Final Exam 40 %Ahas AlqNo ratings yet
- Basic InstallationDocument7 pagesBasic InstallationAhas AlqNo ratings yet
- Tecnel Pe LabDocument159 pagesTecnel Pe LabAhas AlqNo ratings yet
- Determine The Equivalent Impedance in The Circuit ShownDocument1 pageDetermine The Equivalent Impedance in The Circuit ShownAhas AlqNo ratings yet
- Solve Arbitrary Equations: Newton's MethodDocument1 pageSolve Arbitrary Equations: Newton's MethodAhas AlqNo ratings yet
- Ee 125 SP 19 L1 L2Document12 pagesEe 125 SP 19 L1 L2Ahas AlqNo ratings yet
- التحكم في المحركات الحثية ثلاثية الأوجهDocument15 pagesالتحكم في المحركات الحثية ثلاثية الأوجهAaissa AaissNo ratings yet
- EEP110 SyllabusDocument1 pageEEP110 SyllabusAhas AlqNo ratings yet
- EE 115 Electrical Circuits Quiz 2 Norton Equivalent ProblemDocument1 pageEE 115 Electrical Circuits Quiz 2 Norton Equivalent ProblemAhas AlqNo ratings yet
- Course Outline: Electrical Machines Technology ProgramDocument3 pagesCourse Outline: Electrical Machines Technology ProgramAhas AlqNo ratings yet
- EEP110 SyllabusDocument1 pageEEP110 SyllabusAhas AlqNo ratings yet
- Ee270 Fall17 L1Document8 pagesEe270 Fall17 L1Ahas AlqNo ratings yet
- For The Circuit Shown, Write The Mesh Equations and Solve For I, I, and IDocument1 pageFor The Circuit Shown, Write The Mesh Equations and Solve For I, I, and IAhas AlqNo ratings yet
- Ee115 Sample Exam1Document4 pagesEe115 Sample Exam1Ahas AlqNo ratings yet
- EE 115 Electrical Circuits Quiz 4 SolutionsDocument1 pageEE 115 Electrical Circuits Quiz 4 SolutionsAhas AlqNo ratings yet
- Find: A) Total Impedance Z - B) Determine The Current I - C) Calculate I Using Current Divider Rule. D) Calculate VDocument1 pageFind: A) Total Impedance Z - B) Determine The Current I - C) Calculate I Using Current Divider Rule. D) Calculate VAhas AlqNo ratings yet
- PV Lab ManualDocument15 pagesPV Lab ManualAhas AlqNo ratings yet
- Blue Sample FinalDocument5 pagesBlue Sample FinalAhas AlqNo ratings yet
- Electric Drive Solution Manual PDFDocument138 pagesElectric Drive Solution Manual PDFAhas AlqNo ratings yet
- Kantipudi PTLDocument6 pagesKantipudi PTLAhas AlqNo ratings yet
- Quiz1 Be322sp17Document1 pageQuiz1 Be322sp17Ahas AlqNo ratings yet
- Curves AyedhDocument1 pageCurves AyedhAhas AlqNo ratings yet
- Electrical Machines I Sample Final ExamDocument9 pagesElectrical Machines I Sample Final ExamAhas AlqNo ratings yet
- Faisal2005 PDFDocument8 pagesFaisal2005 PDFAhas AlqNo ratings yet
- Renewable Energy in Kuwait: History and ChallengesDocument1 pageRenewable Energy in Kuwait: History and ChallengesAhas AlqNo ratings yet
- Plotting in ScilabDocument17 pagesPlotting in ScilabCarlos Soza RossNo ratings yet
- Curves AyedhDocument1 pageCurves AyedhAhas AlqNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Greek MathemaDocument6 pagesGreek MathemaSebastian GhermanNo ratings yet
- Casa Cook ArvindDocument65 pagesCasa Cook ArvindLEAN MauritiusNo ratings yet
- Lynn Waterhouse - Critique On Multiple IntelligenceDocument20 pagesLynn Waterhouse - Critique On Multiple IntelligencenkrontirNo ratings yet
- Data Sheet 2.07 Issue A: Water Flow Detector Model: WFDENDocument2 pagesData Sheet 2.07 Issue A: Water Flow Detector Model: WFDENOvidiu GavrilasNo ratings yet
- CrankDocument9 pagesCrankKresna BayuNo ratings yet
- Yara Crop Nutrition For HorticultureDocument8 pagesYara Crop Nutrition For HorticultureadjieNo ratings yet
- Intelligence, Reasoning, Creativity, and WisdomDocument3 pagesIntelligence, Reasoning, Creativity, and WisdomSammy DeeNo ratings yet
- Effect of Usage of Sinter in BOF Steelmaking As A Replacement To Iron Ore As Coolant For Thermal BalanceDocument11 pagesEffect of Usage of Sinter in BOF Steelmaking As A Replacement To Iron Ore As Coolant For Thermal BalancesomnathNo ratings yet
- NSBI 2022-2023 FormsDocument16 pagesNSBI 2022-2023 FormsLove MaribaoNo ratings yet
- Alfa Laval Energy Balance Casestory enDocument2 pagesAlfa Laval Energy Balance Casestory enHélder FernandoNo ratings yet
- NPTEL Control Engineering Assignment 2 - SEO OptimizedDocument4 pagesNPTEL Control Engineering Assignment 2 - SEO OptimizedGanesh RadharamNo ratings yet
- AIA Design Development Deliverable ListDocument8 pagesAIA Design Development Deliverable Listpeterhwilliams100% (1)
- Final 401Document8 pagesFinal 401Hong Chul NamNo ratings yet
- ASTM D 2726 - 05a Standard Test Method For Bulk Specific Gravity and DensityDocument4 pagesASTM D 2726 - 05a Standard Test Method For Bulk Specific Gravity and DensityAzlan AbdNo ratings yet
- Serospin Operating Manual 20100407Document19 pagesSerospin Operating Manual 20100407Verdana50% (2)
- RepairManual NEF M100 M150 P3D32N003E Mar06Document172 pagesRepairManual NEF M100 M150 P3D32N003E Mar06manuel segovia100% (1)
- Incorrect Fuel Level Indication RepairDocument3 pagesIncorrect Fuel Level Indication RepairBogdan StefanNo ratings yet
- Descent of Darwin - Theosophy WatchDocument17 pagesDescent of Darwin - Theosophy Watchjorge_lazaro_6No ratings yet
- B. WoolworthsDocument5 pagesB. WoolworthsNjabulo Shakes NtuliNo ratings yet
- 02 - AFT - Know Your Pump & System Curves - Part 2ADocument8 pages02 - AFT - Know Your Pump & System Curves - Part 2AAlfonso José García LagunaNo ratings yet
- Reviewer On Nervous System Grade VIDocument4 pagesReviewer On Nervous System Grade VIKent Francis LayaguinNo ratings yet
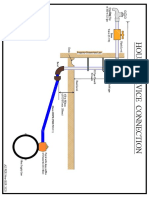
- House Service Connection NEW BSR 2020-1Document1 pageHouse Service Connection NEW BSR 2020-1Deshraj BairwaNo ratings yet
- English Idea BookDocument2 pagesEnglish Idea Bookapi-551731988No ratings yet
- MỘT SỐ CÂU HỎI TRẮC NGHIỆM ÁP DỤNG CHUYÊN ĐỀ GIỚI TỪ TRONG ĐỀ THI ĐHDocument6 pagesMỘT SỐ CÂU HỎI TRẮC NGHIỆM ÁP DỤNG CHUYÊN ĐỀ GIỚI TỪ TRONG ĐỀ THI ĐHPhương ThảoNo ratings yet
- 066 LW Tensile Tester v2.0 PDFDocument4 pages066 LW Tensile Tester v2.0 PDFMarkusNo ratings yet
- Nursing Care Plan For HypertensionDocument5 pagesNursing Care Plan For HypertensionJessy MalloNo ratings yet
- Transmission Lines Explained for Efficiency and Loss ReductionDocument25 pagesTransmission Lines Explained for Efficiency and Loss Reductionjagdish choudharyNo ratings yet
- CBSE Class 11 English Sample Paper Set 5Document8 pagesCBSE Class 11 English Sample Paper Set 5Shantam BasuNo ratings yet
- Alimak AustraliancontractminingDocument5 pagesAlimak AustraliancontractminingmanudemNo ratings yet