You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- (Solutions Manual) Communication Systems 4Th Edition Simon HaykinDocument1,397 pages(Solutions Manual) Communication Systems 4Th Edition Simon HaykinPablo Montes0% (1)
- PLC Primer PDFDocument16 pagesPLC Primer PDFAnish GoswamiNo ratings yet
- In Gate 2012Document24 pagesIn Gate 2012Anish GoswamiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- EECE 301 Signals & Systems Prof. Mark Fowler: Note Set #18Document10 pagesEECE 301 Signals & Systems Prof. Mark Fowler: Note Set #18ahmdNo ratings yet
- V.35 Cable Interface: TutorialDocument4 pagesV.35 Cable Interface: Tutorialamin_bravoNo ratings yet
- Data Book: Automotive TechnicalDocument1 pageData Book: Automotive Technicalpepa67No ratings yet
- En An Ce / Co Nti Nu Ed: Silicon N-Channel Enhancement IGBTDocument4 pagesEn An Ce / Co Nti Nu Ed: Silicon N-Channel Enhancement IGBTOsvaldo ChimbasNo ratings yet
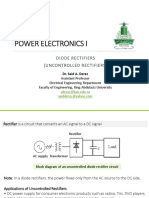
- EE 442 Power Electronics I: Diode Rectifiers (Uncontrolled Rectifiers)Document28 pagesEE 442 Power Electronics I: Diode Rectifiers (Uncontrolled Rectifiers)Hashim GurmaniNo ratings yet
- ANSI C84.1 Table 1 - System Voltage RangesDocument2 pagesANSI C84.1 Table 1 - System Voltage Rangesangel vivasNo ratings yet
- Smartphone - And.pocket - Pc.magazie - June JulyDocument96 pagesSmartphone - And.pocket - Pc.magazie - June Julyanderson4leeNo ratings yet
- Multiplexers and DemultiplexersDocument10 pagesMultiplexers and Demultiplexersamury kgNo ratings yet
- PV-System SizingDocument38 pagesPV-System Sizingdastan989No ratings yet
- PSU CalculatorDocument10 pagesPSU CalculatorVíctor RojasNo ratings yet
- Brand Fatigue: Case Study - ONIDADocument9 pagesBrand Fatigue: Case Study - ONIDADlichrisNo ratings yet
- Pioneer PDP 5071 5070pu Arp 3354Document219 pagesPioneer PDP 5071 5070pu Arp 3354Dan Prewitt100% (1)
- Basic BlastingDocument79 pagesBasic BlastingSunilNo ratings yet
- Data Sheet: MPS 225 E2 20 - 126645Document8 pagesData Sheet: MPS 225 E2 20 - 126645ZOO4YOU AnimalXXXNo ratings yet
- Grade Thresholds - November 2022: Cambridge International AS & A Level Biology (9700)Document2 pagesGrade Thresholds - November 2022: Cambridge International AS & A Level Biology (9700)arhamrafique42No ratings yet
- Saddle Finisher q2 q4 GTC GCDDocument20 pagesSaddle Finisher q2 q4 GTC GCDutilscNo ratings yet
- Fabrication of Industrial Thermocouple PDFDocument2 pagesFabrication of Industrial Thermocouple PDFMarvinNo ratings yet
- Transition Delay Fault Brad Hill ELEC 7250 April 13, 2006Document6 pagesTransition Delay Fault Brad Hill ELEC 7250 April 13, 2006pravallika vysyarajuNo ratings yet
- MD2010 Metal Loop DetectorDocument4 pagesMD2010 Metal Loop DetectorJose Luis Perez MelladoNo ratings yet
- A 2.4 GHZ Fully Integrated LC Vco Design Using 130 NM Cmos TechnologyDocument9 pagesA 2.4 GHZ Fully Integrated LC Vco Design Using 130 NM Cmos TechnologyAdam HernandezNo ratings yet
- Plus Elite Cabin Regatta: User and Installation Guide Manuel D'emploi Et D'installationDocument85 pagesPlus Elite Cabin Regatta: User and Installation Guide Manuel D'emploi Et D'installationmansoorNo ratings yet
- InstallDocument2 pagesInstallambonsolehNo ratings yet
- Two eFlexPWM Module SynchronizationDocument10 pagesTwo eFlexPWM Module SynchronizationDinesh Dhiman100% (1)
- Catalogo CB HVXDocument2 pagesCatalogo CB HVXChristian ReynagaNo ratings yet
- Sifian Ben Khalifa - ErDocument6 pagesSifian Ben Khalifa - ErSofian Ben KhalifaNo ratings yet
- John Sheliak TWZ FormalizationDocument49 pagesJohn Sheliak TWZ Formalizationgalaxy5111No ratings yet
- Gas Leakage Detector (Presentation)Document13 pagesGas Leakage Detector (Presentation)Visveswarnaidu PeravaliNo ratings yet
- Study of Commercial RTOSDocument16 pagesStudy of Commercial RTOSnespijorziNo ratings yet
- PAG 09.1 - Investigating Charging and Discharging of CapacitorsDocument4 pagesPAG 09.1 - Investigating Charging and Discharging of CapacitorsjmsonlNo ratings yet
- All About OFDMDocument7 pagesAll About OFDMDheyauldeen NajimNo ratings yet