You might also like
- Manual de Operacion Taladros KiraDocument53 pagesManual de Operacion Taladros Kiragalvangrr100% (1)
- Tool Load For MC-APP2008-003Document16 pagesTool Load For MC-APP2008-003jon doughNo ratings yet
- SP43 Machine & MaintenanceDocument207 pagesSP43 Machine & Maintenanceorhan kızmazNo ratings yet
- Cara Penggantian Servopack Sigma 2 Ke Sigma 5 Yaskawa PDFDocument47 pagesCara Penggantian Servopack Sigma 2 Ke Sigma 5 Yaskawa PDFyumarestuNo ratings yet
- 12 - System Pomiarowy 1 - ACM-MCMSC-A0E - L14752B01Document79 pages12 - System Pomiarowy 1 - ACM-MCMSC-A0E - L14752B01Leadec LumelNo ratings yet
- Assignment Top Sheet Department of Civil Engineering & TechnologyDocument6 pagesAssignment Top Sheet Department of Civil Engineering & TechnologyEngr MahwishNo ratings yet
- The TurbochargerDocument19 pagesThe TurbochargerAbdallah MansourNo ratings yet
- ANSI-SMACNA 2006 HvacDuctStandardsDocument64 pagesANSI-SMACNA 2006 HvacDuctStandardsErica MorrisonNo ratings yet
- 16 TewariDocument22 pages16 TewariNebojsa BascarevicNo ratings yet
- Numbering Machine DrawingsDocument23 pagesNumbering Machine Drawingsnaga_hsr1986100% (1)
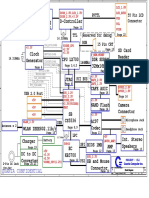
- XO 1 SchematicsDocument25 pagesXO 1 SchematicsSergioNo ratings yet
- Mitsubishi Lathe Macro Guide. 70 Pages.Document70 pagesMitsubishi Lathe Macro Guide. 70 Pages.JohnPaulSmith1No ratings yet
- CNCU ManualDocument6 pagesCNCU ManualJosé AdelinoNo ratings yet
- EN. Barload MINI. Operation Manual.Document168 pagesEN. Barload MINI. Operation Manual.АлексейNo ratings yet
- Automatic Pallet Changer Mechanism Used OnDocument6 pagesAutomatic Pallet Changer Mechanism Used OnSyakuraNo ratings yet
- 2414 2416 Installation ProcedureDocument4 pages2414 2416 Installation ProcedureJames BondNo ratings yet
- FX50Document198 pagesFX50iohammorillo40% (5)
- CabreraDocument62 pagesCabreraIvan IvanovNo ratings yet
- 0006-Configuring Profibus DP Network QJ71PB92V-FX3U-32DP.Document17 pages0006-Configuring Profibus DP Network QJ71PB92V-FX3U-32DP.Pham LongNo ratings yet
- Variable Lead Thread Cutting Initialization Flow For FS-0iDocument20 pagesVariable Lead Thread Cutting Initialization Flow For FS-0iS.DharanipathyNo ratings yet
- ProgrammingDocument274 pagesProgrammingorhan kızmazNo ratings yet
- Kashifuji Gear Deburring Instruction ManualDocument33 pagesKashifuji Gear Deburring Instruction ManualsunhuynhNo ratings yet
- FD Tial: Servicetechnical ReportDocument11 pagesFD Tial: Servicetechnical Reportnhatnguyen101No ratings yet
- Application Equipment Part4Document66 pagesApplication Equipment Part4gguadian21No ratings yet
- Standard ThreadmillsDocument1 pageStandard ThreadmillsshawntsungNo ratings yet
- Able F Ontents: Wire EDM Machine OperationDocument210 pagesAble F Ontents: Wire EDM Machine OperationtranhoachbnNo ratings yet
- Borrado de Todos Los Datos de NC y PLC Gildemeister 6017Document2 pagesBorrado de Todos Los Datos de NC y PLC Gildemeister 6017Antonio de la TorreNo ratings yet
- B-Axis Synchronization Function Work Program - 02Document2 pagesB-Axis Synchronization Function Work Program - 02Kamal KannanNo ratings yet
- Cyclone Data Sheet-1Document10 pagesCyclone Data Sheet-1homersimpson01No ratings yet
- Kafo hmc-500 OMDocument55 pagesKafo hmc-500 OMGuillermo RamirezNo ratings yet
- MX45VAE Diag Elect 7000M P-K601-017-E-R1 AD0002Document75 pagesMX45VAE Diag Elect 7000M P-K601-017-E-R1 AD0002Andres Conejo VargasNo ratings yet
- V-500iA ManualDocument229 pagesV-500iA ManualKien Nguyen TrungNo ratings yet
- VTC510 Romi - ARGO A51+APC-961028Document126 pagesVTC510 Romi - ARGO A51+APC-961028mec04162No ratings yet
- Manual GuideDocument6 pagesManual GuideDeysi CardenasNo ratings yet
- BNP b2309 (Eng) D PDFDocument478 pagesBNP b2309 (Eng) D PDFAngga BismokoNo ratings yet
- LS182 H My FukudaDocument128 pagesLS182 H My FukudavipvashNo ratings yet
- All Clear The NC and The PLC DataDocument2 pagesAll Clear The NC and The PLC DataAntonio de la TorreNo ratings yet
- Modulos y Servos FanucDocument14 pagesModulos y Servos FanucIrving LopezNo ratings yet
- Abx 64TH2Document20 pagesAbx 64TH2lastking_king17No ratings yet
- Fourth-Axis Beta-I Drive Kit User Manual B-165ADocument20 pagesFourth-Axis Beta-I Drive Kit User Manual B-165AGuillermo RamirezNo ratings yet
- Application Equipment Part3Document140 pagesApplication Equipment Part3gguadian21No ratings yet
- Start Up Procedure For Siemens MDocument6 pagesStart Up Procedure For Siemens MS.DharanipathyNo ratings yet
- V55 Maintenance 2Document5 pagesV55 Maintenance 2วรพงษ์ กอชัชวาลNo ratings yet
- PS65 & PS105 - Instruction Manual (En)Document498 pagesPS65 & PS105 - Instruction Manual (En)Cuong tran anhNo ratings yet
- Troubleshooting - 108 Tank Is Not Ready - v1.0Document2 pagesTroubleshooting - 108 Tank Is Not Ready - v1.0nhatnguyen101No ratings yet
- YCM NSV SeriesDocument26 pagesYCM NSV SeriesCNC SYSTEMSNo ratings yet
- Saving and Restoring The PLC: Digital Manuf@cturing SolutionsDocument55 pagesSaving and Restoring The PLC: Digital Manuf@cturing SolutionsTensaigaNo ratings yet
- JIG Controller APC-Safety-Door Functions: Pro.5/Pro.6 (PMC2)Document18 pagesJIG Controller APC-Safety-Door Functions: Pro.5/Pro.6 (PMC2)ceginoNo ratings yet
- Okuma PM-600 PDFDocument1 pageOkuma PM-600 PDFMaria ArnoldNo ratings yet
- Okuma Manuals 368Document71 pagesOkuma Manuals 368AminNo ratings yet
- OPERATION MANUAL SR-20R IV Type B cz.2Document300 pagesOPERATION MANUAL SR-20R IV Type B cz.2slawekudNo ratings yet
- Fanuc 0i-Tc Gs-200 Series v1Document216 pagesFanuc 0i-Tc Gs-200 Series v1Jessica CarterNo ratings yet
- 179 - 8 Interface Description Part 2 Bus and PCDocument362 pages179 - 8 Interface Description Part 2 Bus and PCalexmbtNo ratings yet
- SV3X Manipulator ManualDocument630 pagesSV3X Manipulator ManualMushi RodriguezNo ratings yet
- AWT Maintanace ManualDocument132 pagesAWT Maintanace ManualLawrence KellyNo ratings yet
- Parametrização Do CNC M65 para Diversos Motores e EncodersDocument1 pageParametrização Do CNC M65 para Diversos Motores e EncodersRogério PereiraNo ratings yet
- Doumentacion Ghost - DMGDocument8 pagesDoumentacion Ghost - DMGAntonio de la TorreNo ratings yet
- Transformer Concept With Fanuc Six-Axis RobotDocument20 pagesTransformer Concept With Fanuc Six-Axis RobotSyafiq AzrinNo ratings yet
- MS CitizenDocument22 pagesMS CitizenFavoreel PatrickNo ratings yet
- SVL2416-F Sharp Electrical ManualDocument397 pagesSVL2416-F Sharp Electrical ManualsunhuynhNo ratings yet
- Instalacion delNC or The PLC by Gildemeister 6017Document3 pagesInstalacion delNC or The PLC by Gildemeister 6017Antonio de la TorreNo ratings yet
- 14M Report 2222Document13 pages14M Report 2222Abi JithNo ratings yet
- Daewoo Manuals 1021Document39 pagesDaewoo Manuals 1021Anes BelNo ratings yet
- Gt8 Exciter SettingsDocument54 pagesGt8 Exciter SettingsJhon Wesly BangunNo ratings yet
- FB23 2Document2 pagesFB23 2S.DharanipathyNo ratings yet
- HANDING OVER LIST For LaundryDocument3 pagesHANDING OVER LIST For LaundryS.DharanipathyNo ratings yet
- HANDING OVER LIST For LaundryDocument3 pagesHANDING OVER LIST For LaundryS.DharanipathyNo ratings yet
- Speed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM) Pge NoDocument34 pagesSpeed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM) Pge NoS.Dharanipathy100% (9)
- Experiment Using Capture CMOS & NMOSDocument14 pagesExperiment Using Capture CMOS & NMOSS.DharanipathyNo ratings yet
- Multirate Digital Signal ProcessingDocument64 pagesMultirate Digital Signal ProcessingS.DharanipathyNo ratings yet
- Design Rules: A. Gunasundari Asst - Professor Eee Dept, PSGCTDocument35 pagesDesign Rules: A. Gunasundari Asst - Professor Eee Dept, PSGCTS.DharanipathyNo ratings yet
- pR6 40 8 3HPDocument2 pagespR6 40 8 3HPS.DharanipathyNo ratings yet
- Training Dept (Eee) V Sem E-PlanDocument33 pagesTraining Dept (Eee) V Sem E-PlanS.Dharanipathy100% (5)
- pR6-40-10-4 HPDocument2 pagespR6-40-10-4 HPS.DharanipathyNo ratings yet
- Blanking Piercing Forming DrawingDocument3 pagesBlanking Piercing Forming DrawingS.DharanipathyNo ratings yet
- Psgii - RMD Bill of Materials List 10 HP SUBMERSIBLE MOTOR 6 (9800060100)Document3 pagesPsgii - RMD Bill of Materials List 10 HP SUBMERSIBLE MOTOR 6 (9800060100)S.DharanipathyNo ratings yet
- Speed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM)Document7 pagesSpeed Control of 3 Phase Induction Motor Using PLC S7-200-Em235 & Drive (MM)S.Dharanipathy100% (1)
- Stampings 1Document1 pageStampings 1S.DharanipathyNo ratings yet
- Design of Polyphase Generators and MotorsDocument284 pagesDesign of Polyphase Generators and MotorsMartin J.50% (2)
- Measurement of Stator Resistance TestDocument4 pagesMeasurement of Stator Resistance TestS.DharanipathyNo ratings yet
- Broaching Machines-Broach Making Broaching OperationsDocument48 pagesBroaching Machines-Broach Making Broaching OperationsS.DharanipathyNo ratings yet
- Insulation Resistance TestDocument5 pagesInsulation Resistance TestS.DharanipathyNo ratings yet
- Pneumatic Actuators: For Power, Motion and ControlDocument162 pagesPneumatic Actuators: For Power, Motion and ControlS.Dharanipathy100% (5)
- Wires and Cables1Document7 pagesWires and Cables1S.DharanipathyNo ratings yet
- Installation and Start-Up Guide 11/2002 Edition: Ccu3 Software Version 6 Sinumerik 810DDocument350 pagesInstallation and Start-Up Guide 11/2002 Edition: Ccu3 Software Version 6 Sinumerik 810DS.Dharanipathy100% (5)
- Macro " B " Programming: Makino Asia Pte LTD Application DepartmentDocument71 pagesMacro " B " Programming: Makino Asia Pte LTD Application DepartmentS.Dharanipathy85% (13)
- Siemens Parameter ListDocument4 pagesSiemens Parameter ListS.DharanipathyNo ratings yet
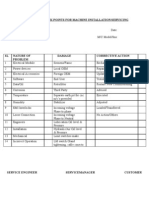
- Electrical Check Points For Machine InstallationDocument1 pageElectrical Check Points For Machine InstallationS.DharanipathyNo ratings yet
- Variable Lead Thread Cutting Initialization Flow For FS-0iDocument20 pagesVariable Lead Thread Cutting Initialization Flow For FS-0iS.DharanipathyNo ratings yet
- Variable Lead Thread Cutting Initialization Flow For FS-0iDocument20 pagesVariable Lead Thread Cutting Initialization Flow For FS-0iS.DharanipathyNo ratings yet
- PHY3QMO - Computational AssignmentDocument4 pagesPHY3QMO - Computational AssignmentReally SexyNo ratings yet
- EEG BCI For Dual Task Driving DetectionDocument9 pagesEEG BCI For Dual Task Driving DetectionBudi SetyawanNo ratings yet
- ASTM D429 Rubber To Metal Adhesion Test EquipmentDocument4 pagesASTM D429 Rubber To Metal Adhesion Test EquipmentLimNo ratings yet
- DESIGNDocument9 pagesDESIGNRowena Remorosa GalayNo ratings yet
- B Splines 04 PDFDocument16 pagesB Splines 04 PDFShawn PetersenNo ratings yet
- Tutorial 4Document30 pagesTutorial 4cruck_linNo ratings yet
- Digital Image CoorelationDocument8 pagesDigital Image CoorelationAkmal BhattiNo ratings yet
- Kinematic Analysis of SlopesDocument30 pagesKinematic Analysis of SlopeslinawebNo ratings yet
- 8 3 Simplex MethodDocument6 pages8 3 Simplex MethodARIJIT BRAHMANo ratings yet
- Cable Element Analysis TechniquesDocument16 pagesCable Element Analysis TechniquesPankaj_Taneja_9684No ratings yet
- Algebra 2 Unit 3 StudentDocument68 pagesAlgebra 2 Unit 3 Studentapi-327127977No ratings yet
- Comparacion Ansys CFX y TelemacDocument8 pagesComparacion Ansys CFX y TelemacOscar Choque JaqquehuaNo ratings yet
- Theil Index DecompositionDocument2 pagesTheil Index DecompositionshareevNo ratings yet
- The Zeeman EffectDocument11 pagesThe Zeeman EffectAlex TarrNo ratings yet
- Koncagul Predicting UCSDocument15 pagesKoncagul Predicting UCSSajid IqbalNo ratings yet
- Shear Strength of Coal Mine OverburdenDocument15 pagesShear Strength of Coal Mine Overburdenjrhst36No ratings yet
- Altitude Correction FactorsDocument6 pagesAltitude Correction Factorscarlos.calderonNo ratings yet
- Atoms Molecules and IonsDocument78 pagesAtoms Molecules and IonszulqarnainkhaliqNo ratings yet
- Result and DiscussionDocument3 pagesResult and DiscussionWenalyn Grace Abella LlavanNo ratings yet
- Lines and CurvesDocument13 pagesLines and CurvesFernandoDiazNo ratings yet
- Machining PDFDocument5 pagesMachining PDFlambrosNo ratings yet
- 9801 01 Que 20100630Document8 pages9801 01 Que 20100630SCZ28No ratings yet
- Analog Vs Digital DataDocument3 pagesAnalog Vs Digital Datanmuhunthan100% (1)
- Charlotte Perriand - From Photography To Design - de La Photographie Au DesignDocument3 pagesCharlotte Perriand - From Photography To Design - de La Photographie Au DesignCamille BinzNo ratings yet
- Rose Diagrams Intro PDFDocument3 pagesRose Diagrams Intro PDFMahmood MuftiNo ratings yet
- Mixing Time Jet MixerDocument9 pagesMixing Time Jet MixerLTE002No ratings yet