You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Coffeemaker ©Document18 pagesCoffeemaker ©pukymottoNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Power Semiconductor Devices: EE 3036 D: Presented byDocument10 pagesPower Semiconductor Devices: EE 3036 D: Presented byShubham ranjanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Transistor Bias CircuitsDocument29 pagesTransistor Bias CircuitsbruhNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Ace Circuit BuilderDocument43 pagesAce Circuit BuilderVeronica GreenNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- FR-BU2-1.5K To 55K FR-BU2-H7.5K To H280K: Inverter Instruction ManualDocument71 pagesFR-BU2-1.5K To 55K FR-BU2-H7.5K To H280K: Inverter Instruction ManualFabian MogroNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Stiker PBRDocument1 pageStiker PBRKejar TayangNo ratings yet
- Benshaw Catalog PDFDocument284 pagesBenshaw Catalog PDFjcvillabl100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On A/C All: Wiring Diagram ManualDocument4 pagesOn A/C All: Wiring Diagram ManualatrflyerNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
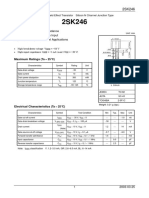
- 2SK246Document5 pages2SK246ytnateNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- تصميم و تدقيق المخططات و الشبكات الكهربائيةDocument189 pagesتصميم و تدقيق المخططات و الشبكات الكهربائيةbarka89% (9)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Monocrystalline - 50Wp - 200Wp: 50W - 200W 17.20V - 30.10V 27.5A - 7.85A 21.10V - 36.10V 2.95A - 8.34ADocument2 pagesMonocrystalline - 50Wp - 200Wp: 50W - 200W 17.20V - 30.10V 27.5A - 7.85A 21.10V - 36.10V 2.95A - 8.34AsuryarisNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Manual NEF160110VAC Overload RelayDocument25 pagesManual NEF160110VAC Overload RelayLong PhamNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Year Wise Previous Ecet Bits: (APECET-2015)Document3 pagesYear Wise Previous Ecet Bits: (APECET-2015)satyaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Price List - Final - Only - MRP - 2014Document10 pagesPrice List - Final - Only - MRP - 2014talha0703097No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Conveyor Belt-Misalignment Switch SEL: Kiepe 555Document4 pagesConveyor Belt-Misalignment Switch SEL: Kiepe 555Renzo Malcolm Garcia PickmannNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- HVDC Exam NotesDocument18 pagesHVDC Exam NotesPALASH ROY OFFICIALNo ratings yet
- Sharma ResistorsDocument6 pagesSharma ResistorsBob TaymanNo ratings yet
- AccuLoad III-SA Installation ManualDocument90 pagesAccuLoad III-SA Installation ManualAli Ben BrahimNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- PGCIL Vizag HVDC India Fact Sheet PDFDocument2 pagesPGCIL Vizag HVDC India Fact Sheet PDFMeera DeviNo ratings yet
- MC7900-Series ONDocument16 pagesMC7900-Series ONRomina DíazNo ratings yet
- Three Digit 7 Segment LED Display DatasheetDocument3 pagesThree Digit 7 Segment LED Display DatasheetMarcelo FrontaliniNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Y Three Phase MotorDocument6 pagesY Three Phase MotorVladimir233100% (2)
- DWC - Weld - Plugs Recep - Layout 1Document2 pagesDWC - Weld - Plugs Recep - Layout 1alftoyNo ratings yet
- Make This 1KVA (1000 Watts) Pure Sine Wave Inverter CircuitDocument1 pageMake This 1KVA (1000 Watts) Pure Sine Wave Inverter CircuitStefan CorneaNo ratings yet
- Headrush FRFR 108 User GuideDocument28 pagesHeadrush FRFR 108 User GuidecarlitsgpNo ratings yet
- Manual Do Gerador WEGDocument122 pagesManual Do Gerador WEGArthur Paulo50% (2)
- Zelio Control RM35LM33MWDocument6 pagesZelio Control RM35LM33MWOgreson OgreNo ratings yet
- Se-704 ManualDocument16 pagesSe-704 ManualMartin Enrique Galvan garciaNo ratings yet
- Digital Ic ApplicationsDocument1 pageDigital Ic ApplicationsChandrashekar67% (3)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Product Name Fb4Sdr70 Fit Off Guide: Electric Cable Duct Systems Pty. LTDDocument2 pagesProduct Name Fb4Sdr70 Fit Off Guide: Electric Cable Duct Systems Pty. LTDSt. Laila QadriantiNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)