You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- LB1845 DDocument9 pagesLB1845 DFernando LizarragaNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Thb7128 InstructionsDocument9 pagesThb7128 InstructionsanhxcoNo ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- 1035 Mitsubishi M56733afpDocument4 pages1035 Mitsubishi M56733afpHenrique Tannús CarvalhoNo ratings yet
- BD 7907 FsDocument3 pagesBD 7907 Fsdggiyvnxssr9222No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- FNB41560 / FNB41560B2: Motion SPM 45 SeriesDocument16 pagesFNB41560 / FNB41560B2: Motion SPM 45 SeriesHadeedAhmedSherNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- FAN7930BDocument22 pagesFAN7930Bpagy snv100% (1)
- Ltc1871ems (LTSX, Frntoluz Welch Allyn)Document36 pagesLtc1871ems (LTSX, Frntoluz Welch Allyn)RICHIHOTS2No ratings yet
- Ci Driver Do Motor Do CD Rom DatasheetDocument11 pagesCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoNo ratings yet
- Features General Description: Advanced Dual PWM and Dual Linear Power ControllerDocument13 pagesFeatures General Description: Advanced Dual PWM and Dual Linear Power ControllerbehzadNo ratings yet
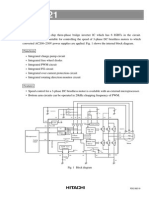
- ECN3021Document10 pagesECN3021Wasang Juwi PracihnoNo ratings yet
- IC 3842 para FonteDocument8 pagesIC 3842 para FonteTomNedscNo ratings yet
- Sla7024m PDFDocument12 pagesSla7024m PDFEJASMANYNo ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet
- 8205Document16 pages8205sonytinNo ratings yet
- 74HC4852 (Driver Injector)Document16 pages74HC4852 (Driver Injector)el_george0079491No ratings yet
- 175-4998 Signal Converter - CaterpillarDocument5 pages175-4998 Signal Converter - CaterpillarImad Hmd75% (4)
- AM5888SDocument10 pagesAM5888SproctepNo ratings yet
- Manual Motores Do Ferro Velho SanyoDocument64 pagesManual Motores Do Ferro Velho SanyoanclamixNo ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- L6565Document18 pagesL6565Sergio Daniel BarretoNo ratings yet
- Datasheet AP1513Document7 pagesDatasheet AP1513timigoNo ratings yet
- TOREX - New Product Catalog 2011Document24 pagesTOREX - New Product Catalog 2011MAfredy LMNo ratings yet
- LTM 4628Document36 pagesLTM 4628Nelson LauNo ratings yet
- Bit 3713Document24 pagesBit 3713neckoprvak5No ratings yet
- Data Sheet STK672Document21 pagesData Sheet STK672Mario Karma LeivaNo ratings yet
- LB1824 PowerBrushlessMotorDriverDocument10 pagesLB1824 PowerBrushlessMotorDriverwhynot05No ratings yet
- UTC1018Document8 pagesUTC1018tangbunnaNo ratings yet
- 4623 FDocument24 pages4623 Fante mitarNo ratings yet
- Ta8264ahq PDFDocument14 pagesTa8264ahq PDFArguetaManuelNo ratings yet
- LB 1845Document7 pagesLB 1845Nacer MezghicheNo ratings yet
- Nippon PDFDocument96 pagesNippon PDFEugen BratuNo ratings yet
- FP 6321Document11 pagesFP 6321Ahmed HussainNo ratings yet
- Data SheetDocument12 pagesData SheetMarcoAntonioCamanTraihuelNo ratings yet
- Mc44608 Fewexternal Components Reliable and Flexible Greenline Very High Voltage PWM ControllerDocument16 pagesMc44608 Fewexternal Components Reliable and Flexible Greenline Very High Voltage PWM ControllerMary ReevesNo ratings yet
- Sla7024m (Motor Driver)Document13 pagesSla7024m (Motor Driver)Franklin Miranda RoblesNo ratings yet
- High Voltage Resonant Controller: DescriptionDocument17 pagesHigh Voltage Resonant Controller: DescriptionJesus SilvaNo ratings yet
- Bd9397efv e PDFDocument30 pagesBd9397efv e PDFshafiuddin7326No ratings yet
- Ltc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching RegulatorsDocument28 pagesLtc1629/Ltc1629-Pg Polyphase, High Efficiency, Synchronous Step-Down Switching Regulatorscatsoithahuong84No ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Datasheet NECDocument20 pagesDatasheet NECPham Trung KienNo ratings yet
- HS8108Document8 pagesHS8108Miloš ZorićNo ratings yet
- Integrated Circuit Systems, IncDocument11 pagesIntegrated Circuit Systems, Incroger marqNo ratings yet
- LT1510CSDocument16 pagesLT1510CSpetrovi482No ratings yet
- STK672 080Document18 pagesSTK672 080Gerardo WarmerdamNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- 1565 RTDocument24 pages1565 RTJose Samuel Robelto RNo ratings yet
- KT60KM06Document2 pagesKT60KM06Luciano DiasNo ratings yet
- 1fázisú Frekvenciaváltó, 3fázisú Frekvenciaváltó, Inverter Katalógus KatalógusDocument10 pages1fázisú Frekvenciaváltó, 3fázisú Frekvenciaváltó, Inverter Katalógus Katalóguses64u4No ratings yet
- PM 150 CSD 120Document7 pagesPM 150 CSD 120elecompinnNo ratings yet
- Sla7024 26 29mDocument12 pagesSla7024 26 29mbashtavNo ratings yet
- 5-Channel BTL Driver For DVD Player AM5868SDocument10 pages5-Channel BTL Driver For DVD Player AM5868SnoileksirtNo ratings yet
- SA5888Document8 pagesSA5888albinicue1No ratings yet
- Datasheet tl494Document6 pagesDatasheet tl494london335No ratings yet
- Data SheetDocument7 pagesData Sheetitamar_123No ratings yet
- 10 FM Generation DetectionDocument10 pages10 FM Generation DetectionLive MCQ ExamNo ratings yet
- Application Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BDocument22 pagesApplication Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BRicardo VieiraNo ratings yet
- GBPPR 'Zine - Issue #77Document60 pagesGBPPR 'Zine - Issue #77GBPPRNo ratings yet
- Manual Instalare Utilizare en J-424Document64 pagesManual Instalare Utilizare en J-424Daniel Tiberiu DorcuNo ratings yet
- 20141018roorkee Cas WsDocument135 pages20141018roorkee Cas WsManas AroraNo ratings yet
- Experiment No. 1: Objective: Write A MATLAB Program To Generate An Exponential Sequence X (N) (A)Document53 pagesExperiment No. 1: Objective: Write A MATLAB Program To Generate An Exponential Sequence X (N) (A)Shinibali MandalNo ratings yet
- Ad 630Document13 pagesAd 630Antonio PerezNo ratings yet
- Ece V Analog Communication NotesDocument74 pagesEce V Analog Communication Notesharish solpureNo ratings yet
- SSM 2166Document20 pagesSSM 2166enzo_60No ratings yet
- 7SR11 and 7SR12 - Argus Complete Technical ManualDocument398 pages7SR11 and 7SR12 - Argus Complete Technical ManualAnonymous YWDRaCkSNo ratings yet
- Lab1 AM Modulation Demod HandoutDocument5 pagesLab1 AM Modulation Demod HandoutAshok Naik100% (1)
- Flame Eye (Mayank)Document10 pagesFlame Eye (Mayank)Sahil Mishra100% (1)
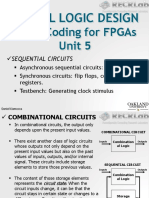
- Digital Logic Design: VHDL Coding For Fpgas Unit 5Document34 pagesDigital Logic Design: VHDL Coding For Fpgas Unit 5Srinivas CherukuNo ratings yet
- Basic Television, Bernard GrobDocument15 pagesBasic Television, Bernard GrobaledieNo ratings yet
- CS8411 CS8412: Digital Audio Interface ReceiverDocument36 pagesCS8411 CS8412: Digital Audio Interface Receivertinears02No ratings yet
- Esd5111 enDocument4 pagesEsd5111 enRicardo MonteroNo ratings yet
- CheetaDocument144 pagesCheetaArith KrishnanandanNo ratings yet
- CATALOG - Fire Alarm Control Panels PDFDocument4 pagesCATALOG - Fire Alarm Control Panels PDFYe Shen BinajayaNo ratings yet
- Service Manual: Color MonitorDocument44 pagesService Manual: Color MonitorAntonio AscanioNo ratings yet
- DS CVS 100 LC-EnglishDocument3 pagesDS CVS 100 LC-EnglishcarlosNo ratings yet
- De Lab Manual-EEE New1Document77 pagesDe Lab Manual-EEE New1selva_raj215414No ratings yet
- M177 PDFDocument47 pagesM177 PDFRAUL ALEXANDER CHAMORRO TOBARNo ratings yet
- TDA5100Document39 pagesTDA5100JGAR2009No ratings yet
- 3) DB11 Detector BaseDocument2 pages3) DB11 Detector BaseMosin Bin MahammedNo ratings yet
- Module 1 Measurement of Inductance and CapacitanceDocument15 pagesModule 1 Measurement of Inductance and CapacitancemanjulabiradarNo ratings yet
- Application Note Tea5767-8Document59 pagesApplication Note Tea5767-8lalala99999No ratings yet
- RS Unit 3Document14 pagesRS Unit 3ECE AKITSNo ratings yet
- Synchronous or Phase-Sensitive DetectorDocument3 pagesSynchronous or Phase-Sensitive DetectorJoao CelloNo ratings yet
- MTL4500/MTL5500 Series: Intrinsic Safety (IS) Isolators For Hazardous Area InterfacingDocument42 pagesMTL4500/MTL5500 Series: Intrinsic Safety (IS) Isolators For Hazardous Area InterfacingguguNo ratings yet
- Piranha and QABrowser Users Manual - English-V5.5CDocument29 pagesPiranha and QABrowser Users Manual - English-V5.5Cduyquan2999No ratings yet