You might also like
- Abinitio InterviewDocument70 pagesAbinitio InterviewChandni Kumari100% (5)
- ICC Design PlanningDocument471 pagesICC Design Planningm100% (1)
- Clock GateDocument19 pagesClock Gateamma4manuNo ratings yet
- Sybase 12 Install InstructionsDocument29 pagesSybase 12 Install InstructionsJohn ThorntonNo ratings yet
- How To Become An Online Entrepreneur Ebook V2Document7 pagesHow To Become An Online Entrepreneur Ebook V2Nick BlackNo ratings yet
- Static Timing Analysis OverviewDocument8 pagesStatic Timing Analysis OverviewAmit Raj100% (1)
- Sta VlsiDocument40 pagesSta VlsiSanchitJain100% (1)
- Synopsys PrimeTime - Introduction To Static Timing Analysis WorkshopDocument21 pagesSynopsys PrimeTime - Introduction To Static Timing Analysis WorkshopApoorva Bhatt100% (2)
- Static Timing AnalysisDocument71 pagesStatic Timing Analysisapi-3762689100% (13)
- Lpower Design Method UPFDocument12 pagesLpower Design Method UPFumeshNo ratings yet
- Advanced Fusion Compiler Synthesis and P& R Technologies To Drive Performance andDocument37 pagesAdvanced Fusion Compiler Synthesis and P& R Technologies To Drive Performance andyang hu100% (1)
- Power Gating - Power Management Technique: VLSI Basics and Interview QuestionsDocument12 pagesPower Gating - Power Management Technique: VLSI Basics and Interview QuestionsRohith RajNo ratings yet
- Upf PresentationDocument30 pagesUpf PresentationAnupam Gajendra Narayan ChoudharyNo ratings yet
- Physical Design Interview QuestionsDocument37 pagesPhysical Design Interview Questionsmaheshsamanapally100% (1)
- VLSI Test Principles and Architectures: Design for TestabilityFrom EverandVLSI Test Principles and Architectures: Design for TestabilityRating: 4.5 out of 5 stars4.5/5 (4)
- Static Timing Analysis 9100Document32 pagesStatic Timing Analysis 9100Balaji VenkataramanNo ratings yet
- Clock Skew Analysis and Static Timing Analysis FundamentalsDocument4 pagesClock Skew Analysis and Static Timing Analysis Fundamentalsniranjanpujari25100% (1)
- Static Timing AnalysisDocument40 pagesStatic Timing Analysissaranya008No ratings yet
- Static Timing AnalysisDocument100 pagesStatic Timing Analysismrinalmishra100% (2)
- 7 CLK Tree SynthesisDocument64 pages7 CLK Tree Synthesisdharma_panga8217100% (1)
- Physical Design FlowDocument42 pagesPhysical Design Flowelumalaianitha100% (1)
- 28nm Silicon and Design Enablement The Foundry and EDA Vendor PerspectiveDocument31 pages28nm Silicon and Design Enablement The Foundry and EDA Vendor Perspectiveswathikomati7870No ratings yet
- PrimeTime SlidesDocument47 pagesPrimeTime SlidesRamakrishnaRao SoogooriNo ratings yet
- From RTL To GDS Using Synopsys Flow Within Less Then 10 WeeksDocument15 pagesFrom RTL To GDS Using Synopsys Flow Within Less Then 10 WeeksLohitNo ratings yet
- 2007 12 ICC Incremental TrainingDocument129 pages2007 12 ICC Incremental Trainingvikas.vkp50% (4)
- Special CelllsDocument14 pagesSpecial Celllspdnoob100% (4)
- Static Timing Analysis Facts: Comprehensive GuideDocument2 pagesStatic Timing Analysis Facts: Comprehensive GuideLalit Gohate100% (3)
- Primetime SynopsysDocument3 pagesPrimetime SynopsysPrabakaran EllaiyappanNo ratings yet
- Static Timing 1Document27 pagesStatic Timing 1Pradeep BabuNo ratings yet
- Notes9 STA and Clock TreeDocument7 pagesNotes9 STA and Clock TreeBandari PavanNo ratings yet
- Low Power Upf NotesDocument5 pagesLow Power Upf Notessaugat guhaNo ratings yet
- SignOff checks: DRC, LVS, IR Drop, EM, Scan Tracing & DFMDocument15 pagesSignOff checks: DRC, LVS, IR Drop, EM, Scan Tracing & DFMPraveen Ramesh KarnamNo ratings yet
- PD Flow I - Floorplan - Physical Design, STA & Synthesis, DFT, Automation & Flow Dev, Verification Services. Turnkey ProjectsDocument21 pagesPD Flow I - Floorplan - Physical Design, STA & Synthesis, DFT, Automation & Flow Dev, Verification Services. Turnkey ProjectsShwethNo ratings yet
- Design Compiler SynthesisDocument14 pagesDesign Compiler SynthesisafriendNo ratings yet
- STA CornersDocument39 pagesSTA Cornerscannister100% (1)
- Wire Load ModelDocument18 pagesWire Load Modelvincentvln100% (1)
- 11timing Concepts and Physical DesignDocument42 pages11timing Concepts and Physical DesignTeja Reddy100% (2)
- Static Timing Analysis - MaharshiDocument29 pagesStatic Timing Analysis - MaharshiSatish Yada100% (1)
- Low Power VerificationDocument19 pagesLow Power VerificationJyothi ShrinivasNo ratings yet
- High Fanout Nets Optimized in Design CompilerDocument26 pagesHigh Fanout Nets Optimized in Design CompilerAditya Devarakonda100% (3)
- Training 3Document17 pagesTraining 3Thomas George100% (1)
- Clock Gating MethodologyDocument71 pagesClock Gating MethodologyGirish BabuNo ratings yet
- Low Power SyntheisDocument18 pagesLow Power Syntheispdnoob100% (3)
- Optimize Digital Design SynthesisDocument41 pagesOptimize Digital Design SynthesisFeroz AhmedNo ratings yet
- Ackend (Physical Design) Interview Questions and AnswersDocument46 pagesAckend (Physical Design) Interview Questions and AnswersP Brahma Reddy100% (2)
- Physical Design CompleteDocument303 pagesPhysical Design CompleteVenkata KarthikNo ratings yet
- Vlsi Physical DesignDocument3 pagesVlsi Physical DesignMahesh KanikeNo ratings yet
- Clock ImplementationDocument77 pagesClock ImplementationKrish GokulNo ratings yet
- 2012 Design Closure Within ICC PDFDocument171 pages2012 Design Closure Within ICC PDFelumalaianitha100% (1)
- VLSI Basics And Interview Questions Macro PlacementDocument3 pagesVLSI Basics And Interview Questions Macro Placementprasanna810243100% (1)
- PD InterviewDocument8 pagesPD InterviewPraveen Ramesh KarnamNo ratings yet
- ICCII Physical Lib Analysis For Optimal Routing v1 0122 EditDocument59 pagesICCII Physical Lib Analysis For Optimal Routing v1 0122 Editferrari100% (1)
- Design & Verification of Low Power SocsDocument54 pagesDesign & Verification of Low Power SocsAnkit GoelNo ratings yet
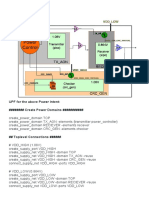
- UPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Document4 pagesUPF Example: UPF For The Above Power Intent: ######## Create Power Domains ###########Mayur Agarwal50% (2)
- Interview QuestionsDocument23 pagesInterview QuestionsSumanth VarmaNo ratings yet
- TimingDocument15 pagesTimingSameer BadachiNo ratings yet
- StaDocument91 pagesStaMohd Mayur100% (1)
- Setup Hold TimeDocument28 pagesSetup Hold Timeavneesh_singh100% (1)
- Sta Vlsi PDFDocument40 pagesSta Vlsi PDFRahul YadavNo ratings yet
- Static Timing AnalysisDocument49 pagesStatic Timing AnalysisedussinNo ratings yet
- Timing PathsDocument44 pagesTiming PathsMohammed El-Adawy100% (2)
- VLSI Design Blog Explains Types of Timing Paths in Static Timing Analysis (STADocument10 pagesVLSI Design Blog Explains Types of Timing Paths in Static Timing Analysis (STAGurusewak Singh PawarNo ratings yet
- LP Trend08 GodwinDocument56 pagesLP Trend08 Godwingoud.mahesh0584269No ratings yet
- Ethernet PrerequisiteDocument46 pagesEthernet Prerequisitejagadish_dNo ratings yet
- "Smart Grid": A Necessary Component in The Remaking of AmericaDocument20 pages"Smart Grid": A Necessary Component in The Remaking of AmericarashmibrNo ratings yet
- UART To Bus Core SpecificationsDocument10 pagesUART To Bus Core Specificationsgoud.mahesh0584269No ratings yet
- OpenModelicaUsersGuide Latest PDFDocument385 pagesOpenModelicaUsersGuide Latest PDFShubham JainNo ratings yet
- Distance Vector: Step by StepDocument12 pagesDistance Vector: Step by StepMd Saidur Rahman KohinoorNo ratings yet
- Company Profile-Human Resource ServicesDocument16 pagesCompany Profile-Human Resource Servicessyed pashaNo ratings yet
- Basic Microsoft Word (Exercise 1) 2022Document2 pagesBasic Microsoft Word (Exercise 1) 2022Khian BostonNo ratings yet
- RP State of Sre Report 2022Document46 pagesRP State of Sre Report 2022GabrielaLimaDiasNo ratings yet
- bgm13p Datasheet PDFDocument104 pagesbgm13p Datasheet PDFFranklinNo ratings yet
- Thesis School Management System PDFDocument4 pagesThesis School Management System PDFmariaparkslasvegas100% (2)
- Bapi Sap AbapDocument73 pagesBapi Sap Abaprajesh98765No ratings yet
- Generate Mapping Process FailsDocument80 pagesGenerate Mapping Process FailsKalieswaran0% (1)
- On Teaching Digital Image Processing With MATLAB: January 2014Document10 pagesOn Teaching Digital Image Processing With MATLAB: January 2014Ghalia HayetNo ratings yet
- Grillage Analogy MethodDocument43 pagesGrillage Analogy Methodkhx2No ratings yet
- NCKU Compiler 2021 Assignment 1 PagedDocument6 pagesNCKU Compiler 2021 Assignment 1 PagedArthue1316No ratings yet
- Que 1:-Using The Following Database:: Colleges (Cname, City, Address, Phone, Afdate)Document26 pagesQue 1:-Using The Following Database:: Colleges (Cname, City, Address, Phone, Afdate)jassi7nishadNo ratings yet
- HTTP Boot Console LogDocument31 pagesHTTP Boot Console Logdhiraj.testingNo ratings yet
- NWDISystemDocument16 pagesNWDISystemYvette CamposNo ratings yet
- Export Failed: The Data Cannot Be Displayed Because The Query Returned Too Many Records. Please Try Filtering Your Data in SAP Analytics CloudDocument2 pagesExport Failed: The Data Cannot Be Displayed Because The Query Returned Too Many Records. Please Try Filtering Your Data in SAP Analytics CloudVENKATESHNo ratings yet
- 2023 BlackRock Summer Analyst Program AcceleratorDocument1 page2023 BlackRock Summer Analyst Program AcceleratorOlaoluwa OgunleyeNo ratings yet
- Programmable Switching DC Power SupplyDocument6 pagesProgrammable Switching DC Power SupplyPaolo CristianiNo ratings yet
- Object Oriented Programming: RevisionDocument11 pagesObject Oriented Programming: RevisionMahmoud Abdel-SalamNo ratings yet
- CHS-NC2 Reviewer - With Oral Questioning - 0Document14 pagesCHS-NC2 Reviewer - With Oral Questioning - 0rommel patoritoNo ratings yet
- FxExtractor OperationDocument6 pagesFxExtractor OperationMirevStefanNo ratings yet
- Design and Implementation of Convolutional Neural Network Accelerator Based On RISCVDocument6 pagesDesign and Implementation of Convolutional Neural Network Accelerator Based On RISCVmadupiz@gmailNo ratings yet
- Business: Powerpoint Template Designed by Mr. Cai With Microsoft Office 2016Document20 pagesBusiness: Powerpoint Template Designed by Mr. Cai With Microsoft Office 2016daisyNo ratings yet
- Regression TestingDocument18 pagesRegression TestingAaka ShNo ratings yet
- Lab Exercise 12 - Read JSON Using PyQtDocument3 pagesLab Exercise 12 - Read JSON Using PyQthiteshNo ratings yet
- Parábolas Modernas - Modern ParablesDocument9 pagesParábolas Modernas - Modern ParablesfreekidstoriesNo ratings yet
- Thesis Chapter I - ACM FormatDocument1 pageThesis Chapter I - ACM FormatRyan Podiotan Adlao Sapitanan100% (1)