You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Cea 4022Document25 pagesCea 4022mohammadNo ratings yet
- American Literature SyllabusDocument5 pagesAmerican Literature Syllabusapi-408283709No ratings yet
- PI Datasheet E-821 20150121Document5 pagesPI Datasheet E-821 20150121Sri SaiNo ratings yet
- Our Solar System: by Harshitha Yadav J.R.KDocument5 pagesOur Solar System: by Harshitha Yadav J.R.KSri SaiNo ratings yet
- GenerationsDocument1 pageGenerationsSri SaiNo ratings yet
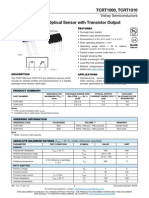
- IR Sensor DatasheetDocument10 pagesIR Sensor DatasheetSri SaiNo ratings yet
- Heli TheoryDocument105 pagesHeli TheorySri SaiNo ratings yet
- WilliamsDocument361 pagesWilliamsSri SaiNo ratings yet
- Lesson - 2: Ports or Devices Communication and Communication - ProtocolsDocument41 pagesLesson - 2: Ports or Devices Communication and Communication - ProtocolsSri SaiNo ratings yet
- Macro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresDocument11 pagesMacro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresSri SaiNo ratings yet
- Characterization of Composite Piezoelectric Materials For Smart Joint ApplicationsDocument90 pagesCharacterization of Composite Piezoelectric Materials For Smart Joint ApplicationsSri SaiNo ratings yet
- Nano MFCDocument10 pagesNano MFCSri SaiNo ratings yet
- Application of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureDocument4 pagesApplication of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureSri SaiNo ratings yet
- ThesisDocument127 pagesThesisSri SaiNo ratings yet
- MFC TtestDocument141 pagesMFC TtestSri SaiNo ratings yet
- Atmel Studio ReadmeDocument31 pagesAtmel Studio Readmetitu1993No ratings yet
- Hindi Vyakaran by Anwar ParvezDocument204 pagesHindi Vyakaran by Anwar Parvezanwar_parvez08No ratings yet
- Controller ExcitationDocument8 pagesController ExcitationSri SaiNo ratings yet
- Using Piezoelectric Materials On The Surface of Air Foils To Generate VoltageDocument13 pagesUsing Piezoelectric Materials On The Surface of Air Foils To Generate VoltageSri SaiNo ratings yet
- USB QICii Getting Started GuideDocument14 pagesUSB QICii Getting Started GuideWilliam GuarientiNo ratings yet
- Cba and CBQ: C1 Rxlev - Rxlev - Access - Min - Rxlev: Average Receive Level of The Ms in The Unit of DBMDocument3 pagesCba and CBQ: C1 Rxlev - Rxlev - Access - Min - Rxlev: Average Receive Level of The Ms in The Unit of DBMTadele TekaNo ratings yet
- Lc5296-At Lc5248e-At User ManualDocument44 pagesLc5296-At Lc5248e-At User ManualAtreyo SahaNo ratings yet
- L Edit TutorialDocument25 pagesL Edit TutorialHiren J VasavaNo ratings yet
- Battery Replacement Guide For ComAp ControllersDocument20 pagesBattery Replacement Guide For ComAp ControllersKhurram ShahzadNo ratings yet
- 22MCC20067 WS1Document6 pages22MCC20067 WS1Neeraj KukretiNo ratings yet
- Ericsson Asb 150 02 PDFDocument1 pageEricsson Asb 150 02 PDFLannNo ratings yet
- CZ 1Document2 pagesCZ 1ML MLNo ratings yet
- Ma ZEDocument1 pageMa ZEShawn MikeNo ratings yet
- Mypower S3330 Series L3 10gigabit Access Switch DatasheetDocument12 pagesMypower S3330 Series L3 10gigabit Access Switch DatasheetAlejandro LeyvaNo ratings yet
- (3T) 3R - Ilvjhi:-: 150 QV Pitd Y Ynffe 1 Y Y Os Yy #TT, Try Y JyrfeDocument11 pages(3T) 3R - Ilvjhi:-: 150 QV Pitd Y Ynffe 1 Y Y Os Yy #TT, Try Y JyrfesonalofficewscworkfileNo ratings yet
- NF79115240802810 ETicket-1Document3 pagesNF79115240802810 ETicket-1Aftab AlamNo ratings yet
- Aruba 207 Series Access Point Data SheetDocument8 pagesAruba 207 Series Access Point Data SheetMeela ZengNo ratings yet
- Using Slic3r With The XYZprinting DaVinci 1.0Document5 pagesUsing Slic3r With The XYZprinting DaVinci 1.0anonymoose471No ratings yet
- Forza XADV 750 - 2021 Program SmartkeyDocument8 pagesForza XADV 750 - 2021 Program SmartkeyAny TimNo ratings yet
- PARKER Amplificacador Valvula Proporcional VS111 HY11-5715-577 UKDocument7 pagesPARKER Amplificacador Valvula Proporcional VS111 HY11-5715-577 UKUbiratan JuniorNo ratings yet
- RPT Unit2Document180 pagesRPT Unit2MJ Sharon WilsonNo ratings yet
- Unix PDFDocument115 pagesUnix PDFLakshminarayana SamaNo ratings yet
- ZPL Programming ManualDocument1,112 pagesZPL Programming ManualMile BericNo ratings yet
- OnePlus 10T 5G (CPH2415) EU DoC V3.0 (Multilingual)Document33 pagesOnePlus 10T 5G (CPH2415) EU DoC V3.0 (Multilingual)ozan036777proNo ratings yet
- Sample IEEE Article Ready FormatDocument5 pagesSample IEEE Article Ready FormatSandra WendamNo ratings yet
- Openssl Aes.cDocument3 pagesOpenssl Aes.cschttNo ratings yet
- Nueva Vizcaya State University: Bayombong CampusDocument1 pageNueva Vizcaya State University: Bayombong CampusJenny TubaranNo ratings yet
- Onkyo Tx-Sr500e PDFDocument44 pagesOnkyo Tx-Sr500e PDFLászló TóthNo ratings yet
- Modular - Gen Math11-Lesson 1.1 Functions As Mathematical Model of Real-Life Situations - BALLERAS, MDocument12 pagesModular - Gen Math11-Lesson 1.1 Functions As Mathematical Model of Real-Life Situations - BALLERAS, MAyesha YusopNo ratings yet
- Traverse ComputationDocument42 pagesTraverse ComputationKamal KitaharaNo ratings yet
- Prakt 8 - Openssl Demo Encrypting Decrypting Files Using Both Symmetric and Asymmetric Encryption PDFDocument6 pagesPrakt 8 - Openssl Demo Encrypting Decrypting Files Using Both Symmetric and Asymmetric Encryption PDFAbiyau NeoNo ratings yet
- 8255 Interfacing ExampleDocument9 pages8255 Interfacing ExampleAsad RehanNo ratings yet