You might also like
- Nonlethal Weapons and CapabilitiesDocument74 pagesNonlethal Weapons and Capabilitiesbingwazzup100% (2)
- Non-Lethal Weaponry: Applications To Ac-130 GunshipsDocument36 pagesNon-Lethal Weaponry: Applications To Ac-130 Gunshipsbingwazzup100% (1)
- Csat 11Document52 pagesCsat 11Mossad NewsNo ratings yet
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocument6 pagesAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- DEW Electromagnetic SpectrumDocument3 pagesDEW Electromagnetic SpectrumbingwazzupNo ratings yet
- Behavioral and Cognitive Effects of Microwave ExposureDocument24 pagesBehavioral and Cognitive Effects of Microwave Exposurebingwazzup100% (1)
- Ip Multicast Part1Document18 pagesIp Multicast Part1Pallab PalNo ratings yet
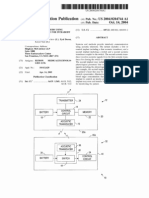
- Remote Mobile Monitoring and Communications Systems (US Patent # 5870029)Document7 pagesRemote Mobile Monitoring and Communications Systems (US Patent # 5870029)bingwazzup100% (1)
- Auditory Response To Pulsed Radiofrequency EnergyDocument12 pagesAuditory Response To Pulsed Radiofrequency Energybingwazzup100% (1)
- The Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteeDocument14 pagesThe Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteespectabearNo ratings yet
- Ultrasonic Interrogating System and Exciter-Detector Circuit ThereforDocument12 pagesUltrasonic Interrogating System and Exciter-Detector Circuit ThereforbingwazzupNo ratings yet
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocument26 pagesImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupNo ratings yet
- Radio Direction FinderDocument78 pagesRadio Direction Finderbingwazzup100% (1)
- The Invisible Third World War by W. H. Bowart and Richard SuttonDocument35 pagesThe Invisible Third World War by W. H. Bowart and Richard Suttonhisroyalslynessone2funkNo ratings yet
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocument18 pagesApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupNo ratings yet
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocument26 pagesImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupNo ratings yet
- Directed Energy WeaponsDocument368 pagesDirected Energy WeaponsPete Santilli100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocument6 pagesModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocument18 pagesApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupNo ratings yet
- Frequency Choice For Radio Telemetry: HF-vs-VHF-ConundrumDocument7 pagesFrequency Choice For Radio Telemetry: HF-vs-VHF-Conundrumbingwazzup100% (1)
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocument10 pagesRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupNo ratings yet
- An Overview of Acoustic TelemetryDocument11 pagesAn Overview of Acoustic TelemetrybingwazzupNo ratings yet
- The Radio Armateur Microwave Communications HandbookDocument192 pagesThe Radio Armateur Microwave Communications HandbookRapee Dev100% (1)
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocument6 pagesModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- Aerial Laser ScanningDocument244 pagesAerial Laser Scanningbingwazzup100% (1)
- An Overview of Acoustic TelemetryDocument11 pagesAn Overview of Acoustic TelemetrybingwazzupNo ratings yet
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocument6 pagesAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocument10 pagesRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupNo ratings yet
- Infra SoundDocument7 pagesInfra Soundbingwazzup100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Kahveci: OzkanDocument2 pagesKahveci: OzkanVictor SmithNo ratings yet
- Ecole Polytechnique Federale de LausanneDocument44 pagesEcole Polytechnique Federale de LausanneSyed Yahya HussainNo ratings yet
- PWC Global Project Management Report SmallDocument40 pagesPWC Global Project Management Report SmallDaniel MoraNo ratings yet
- Fiera Foods - Production SupervisorDocument1 pageFiera Foods - Production SupervisorRutul PatelNo ratings yet
- 2007 Bomet District Paper 2Document16 pages2007 Bomet District Paper 2Ednah WambuiNo ratings yet
- Fong vs. DueñasDocument2 pagesFong vs. DueñasWinter Woods100% (3)
- Political Reporting:: Political Reporting in Journalism Is A Branch of Journalism, Which SpecificallyDocument6 pagesPolitical Reporting:: Political Reporting in Journalism Is A Branch of Journalism, Which SpecificallyParth MehtaNo ratings yet
- Vehicle Registration Renewal Form DetailsDocument1 pageVehicle Registration Renewal Form Detailsabe lincolnNo ratings yet
- JD - Software Developer - Thesqua - Re GroupDocument2 pagesJD - Software Developer - Thesqua - Re GroupPrateek GahlanNo ratings yet
- Trading Course DetailsDocument9 pagesTrading Course DetailsAnonymous O6q0dCOW6No ratings yet
- Mechanics of Deformable BodiesDocument21 pagesMechanics of Deformable BodiesVarun. hrNo ratings yet
- Tygon S3 E-3603: The Only Choice For Phthalate-Free Flexible TubingDocument4 pagesTygon S3 E-3603: The Only Choice For Phthalate-Free Flexible TubingAluizioNo ratings yet
- Weir Stability Analysis Report PDFDocument47 pagesWeir Stability Analysis Report PDFSubodh PoudelNo ratings yet
- Periodic ClassificationDocument4 pagesPeriodic ClassificationtusharNo ratings yet
- Furnace ITV Color Camera: Series FK-CF-3712Document2 pagesFurnace ITV Color Camera: Series FK-CF-3712Italo Rodrigues100% (1)
- Oblicon SampleDocument1 pageOblicon SamplelazylawatudentNo ratings yet
- Computer Portfolio (Aashi Singh)Document18 pagesComputer Portfolio (Aashi Singh)aashisingh9315No ratings yet
- Obligations and Contracts Bar Questions and Answers PhilippinesDocument3 pagesObligations and Contracts Bar Questions and Answers PhilippinesPearl Aude33% (3)
- A General Guide To Camera Trapping Large Mammals in Tropical Rainforests With Particula PDFDocument37 pagesA General Guide To Camera Trapping Large Mammals in Tropical Rainforests With Particula PDFDiego JesusNo ratings yet
- PCSE_WorkbookDocument70 pagesPCSE_WorkbookWilliam Ribeiro da SilvaNo ratings yet
- Programming Manual Magic 308/616-CLI Quick ReferenceDocument16 pagesProgramming Manual Magic 308/616-CLI Quick ReferencekrishnamarajublrNo ratings yet
- Lecture 4Document25 pagesLecture 4ptnyagortey91No ratings yet
- Electrosteel Castings Limited (ECL) - Technology That CaresDocument4 pagesElectrosteel Castings Limited (ECL) - Technology That CaresUjjawal PrakashNo ratings yet
- Expressive Matter Vendor FaqDocument14 pagesExpressive Matter Vendor FaqRobert LedermanNo ratings yet
- Employee Engagement A Case Study at IVRCL-1Document7 pagesEmployee Engagement A Case Study at IVRCL-1Anonymous dozzql7znKNo ratings yet
- Inventarisasi Data Kondisi Jalan Ke Dalam Aplikasi Sistem Informasi Geografis (Sig)Document10 pagesInventarisasi Data Kondisi Jalan Ke Dalam Aplikasi Sistem Informasi Geografis (Sig)Wiro SablengNo ratings yet
- WhatsoldDocument141 pagesWhatsoldLuciana KarajalloNo ratings yet
- Failure Analysis Case Study PDFDocument2 pagesFailure Analysis Case Study PDFScott50% (2)
- BMS Technical ManualDocument266 pagesBMS Technical Manualiago manziNo ratings yet
- Bluetooth Home Automation Using ArduinoDocument25 pagesBluetooth Home Automation Using ArduinoRabiNo ratings yet