You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Data Sheet: TDA1510AQDocument12 pagesData Sheet: TDA1510AQGerardo PonceNo ratings yet
- DIY Homemade Septic System PDFDocument9 pagesDIY Homemade Septic System PDFCebu CribsNo ratings yet
- Lesson 5 Digital Technology and Social ChangeDocument14 pagesLesson 5 Digital Technology and Social ChangeIshang IsraelNo ratings yet
- Pumps and Filters: 345D, 349D, and 349D Excavator Hydraulic SystemDocument2 pagesPumps and Filters: 345D, 349D, and 349D Excavator Hydraulic SystemTeknik MakinaNo ratings yet
- OPA237Document21 pagesOPA237philprefNo ratings yet
- 8 PCO Training Invitation Letter December 2018Document2 pages8 PCO Training Invitation Letter December 2018sayo goraNo ratings yet
- Whirlpool Arc 6700Document7 pagesWhirlpool Arc 6700MiguelLoureiroNo ratings yet
- Soichiro HondaDocument5 pagesSoichiro HondaVeronika YsNo ratings yet
- Leadership and Management 2003Document46 pagesLeadership and Management 2003Ciella Dela Cruz100% (1)
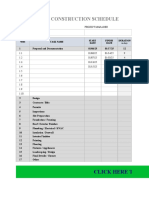
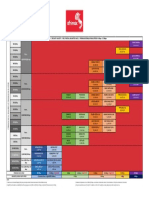
- Residential Construction Schedule: Click Here To Create in SmartsheetDocument14 pagesResidential Construction Schedule: Click Here To Create in SmartsheetVinayak VagheNo ratings yet
- Bridge and Structural EngineeringDocument4 pagesBridge and Structural EngineeringAkhil100% (1)
- 2520 995 RevBDocument52 pages2520 995 RevBgovindarulNo ratings yet
- NiplesDocument59 pagesNiplesJose LiraNo ratings yet
- Project PDFDocument13 pagesProject PDFapi-697727439No ratings yet
- Plate and Frame Filter PressDocument11 pagesPlate and Frame Filter PressOmar Bassam0% (1)
- Data Sheet - Pex 240DWDocument8 pagesData Sheet - Pex 240DWChristine ThompsonNo ratings yet
- What Is A SAP LockDocument3 pagesWhat Is A SAP LockKishore KumarNo ratings yet
- Wilf Book FlyerDocument4 pagesWilf Book FlyerEduardo Manuel Chávarry VelaNo ratings yet
- Andrea BrennanDocument2 pagesAndrea BrennanAnonymous tGJ2lopsNo ratings yet
- Introduction To Turbomachinery Final Exam 1SY 2016-2017Document1 pageIntroduction To Turbomachinery Final Exam 1SY 2016-2017Paul RodgersNo ratings yet
- My Restaurant API DocumentDocument60 pagesMy Restaurant API DocumentJosé FranciscoNo ratings yet
- Ot 701Document2 pagesOt 701Fares Al HoumsiNo ratings yet
- Whitepaper InstallScape InternalsDocument4 pagesWhitepaper InstallScape InternalsKostas KalogeropoulosNo ratings yet
- Advanced Power ElectronicsDocument4 pagesAdvanced Power ElectronicsLinkan PriyadarsiniNo ratings yet
- 58MM Printer Programmer Manual-20161207 PDFDocument31 pages58MM Printer Programmer Manual-20161207 PDFsatryaNo ratings yet
- Laporan Beton 1Document80 pagesLaporan Beton 1Seulgi BearNo ratings yet
- Preventa Safety Detection XCSE5311Document2 pagesPreventa Safety Detection XCSE5311Fernando MoreiraNo ratings yet
- Afrimax Pricing Table Feb23 Rel BDocument1 pageAfrimax Pricing Table Feb23 Rel BPhadia ShavaNo ratings yet
- Datasheet 12NA60Document11 pagesDatasheet 12NA60ed pwtNo ratings yet
- TX IrhsDocument1 pageTX IrhsvelizarkoNo ratings yet