You might also like
- 2Document23 pages2Eyob AdNo ratings yet
- Equations & Conversions: The Following Equations and Conversions Will Be Given As Part of ExamsDocument1 pageEquations & Conversions: The Following Equations and Conversions Will Be Given As Part of ExamsTruong NguyenNo ratings yet
- Boundary LayerDocument3 pagesBoundary LayerPatrick Joseph RoblesNo ratings yet
- PHYS 2210 Equation Sheet 3 Chapter 12: Static EquilibriumDocument1 pagePHYS 2210 Equation Sheet 3 Chapter 12: Static EquilibriumNicholas WelchNo ratings yet
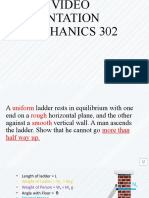
- Video Presentation Mechanics 302Document7 pagesVideo Presentation Mechanics 302hamza buttNo ratings yet
- Assignment 4 International Trade 3HH3Document4 pagesAssignment 4 International Trade 3HH3pyjpvdq9dmNo ratings yet
- ODE Lecture Notes Section 3.8 1 of 14Document14 pagesODE Lecture Notes Section 3.8 1 of 14Pritib KumarNo ratings yet
- Fluid Mechanics I Solution 4 Question 1: Problem P2.139: A B B C D DDocument8 pagesFluid Mechanics I Solution 4 Question 1: Problem P2.139: A B B C D Dcartoon_nateNo ratings yet
- Continuity BernoulliDocument3 pagesContinuity Bernoullibuddy_coolsam2007No ratings yet
- AY2010 CE2134 Hydraulics P04 1st Law Thermo Friction FactorDocument28 pagesAY2010 CE2134 Hydraulics P04 1st Law Thermo Friction FactorEmily ShumNo ratings yet
- Document 2671 9385Document64 pagesDocument 2671 9385lionelhaouna9dNo ratings yet
- MIT8 - 223IAP17 - Lec14 - PotentialsDocument14 pagesMIT8 - 223IAP17 - Lec14 - PotentialsFERNANDO FLORES DE ANDANo ratings yet
- Status of Low-Energy Constants in Chiral Perturbation TheoryDocument48 pagesStatus of Low-Energy Constants in Chiral Perturbation TheoryMartinoPintorettoNo ratings yet
- Lec24 PDFDocument8 pagesLec24 PDFanup chauhanNo ratings yet
- 1 - MechanicsDocument23 pages1 - Mechanicsoj78692No ratings yet
- Closure CFLDocument5 pagesClosure CFLRahulNo ratings yet
- HCI H2 PHY P1 Suggested SolutionDocument4 pagesHCI H2 PHY P1 Suggested Solutionllilizheng8No ratings yet
- Day 14Document10 pagesDay 14احمد الدلالNo ratings yet
- SKF3013 Lecture 2Document22 pagesSKF3013 Lecture 2Ain SufizaNo ratings yet
- Es2011 SolDocument3 pagesEs2011 SolTest EmailNo ratings yet
- 298 Review1 ProblemsDocument9 pages298 Review1 ProblemscapturemrahNo ratings yet
- Physics 361 Solutions To Problem Sets 3,4: 1 Typical Compressibilities and FrequenciesDocument4 pagesPhysics 361 Solutions To Problem Sets 3,4: 1 Typical Compressibilities and FrequenciessfdafNo ratings yet
- FPS FormulasDocument5 pagesFPS FormulasthamaraikkaniNo ratings yet
- Solutions 9Document3 pagesSolutions 9civ08145No ratings yet
- dg1-6 The Gauss Curvature (Detail)Document12 pagesdg1-6 The Gauss Curvature (Detail)publicacc71No ratings yet
- Crankshaft Conecting RodDocument6 pagesCrankshaft Conecting RodMuhammad Farhan Bin SukorNo ratings yet
- 2 3 Acceleration Velocity ModelsDocument6 pages2 3 Acceleration Velocity ModelsTuling, Jose Jr., D.No ratings yet
- Title: Shear Force and Bending Moment ObjectivesDocument23 pagesTitle: Shear Force and Bending Moment ObjectivesSanjoy PathakNo ratings yet
- Solutions: 4. Tunnel Diode (8 PTS) 1) 2) F 0Document2 pagesSolutions: 4. Tunnel Diode (8 PTS) 1) 2) F 0Kolisetty SudhakarNo ratings yet
- MIT Weak FormsDocument18 pagesMIT Weak FormsSaif EldinNo ratings yet
- Problems and SolutionsDocument71 pagesProblems and SolutionsBogdan BlidaruNo ratings yet
- Thermodynamics NotesDocument7 pagesThermodynamics NotesSwagBeast SKJJNo ratings yet
- HTTPS://FR - Scribd.com/document/518094129/2012 Phonetique Progressive Du Francais DebutantDocument7 pagesHTTPS://FR - Scribd.com/document/518094129/2012 Phonetique Progressive Du Francais DebutantkhalidNo ratings yet
- Lecture14 Equilibrium of Rigid BodiesDocument3 pagesLecture14 Equilibrium of Rigid BodieshuzaifaalyanhfNo ratings yet
- Formula Sheet Winter218Document6 pagesFormula Sheet Winter218Michael BarkerNo ratings yet
- Intermediate Thermodynamics Fugacity: DefinitionsDocument19 pagesIntermediate Thermodynamics Fugacity: DefinitionsMukund KsNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFHarbir Singh ParmarNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFCSharp DevelopersNo ratings yet
- Relativity 4Document9 pagesRelativity 4sudaisshenwari917No ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFBuddhadeb RoyNo ratings yet
- Relativity4 2Document9 pagesRelativity4 2Kafka FlippyNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFBuddhadeb RoyNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFSk Suraj SinghNo ratings yet
- Lec7 PDFDocument10 pagesLec7 PDFNeutronNo ratings yet
- HYDRO 1 - Module 2.4 Bernoulli's Energy TheoremDocument8 pagesHYDRO 1 - Module 2.4 Bernoulli's Energy TheoremPhilip SabadiNo ratings yet
- Wave Equation in 1D (Part 1)Document19 pagesWave Equation in 1D (Part 1)baraa AlkhaqaniNo ratings yet
- Coulomb Force in 2D. Electric Field. Superposition PrincipleDocument13 pagesCoulomb Force in 2D. Electric Field. Superposition PrincipleR.durgaNo ratings yet
- Homework Week 5: 3 Ext Ext 3 ExtDocument10 pagesHomework Week 5: 3 Ext Ext 3 ExtIsabelle SimãoNo ratings yet
- Work, Power and EnergyDocument17 pagesWork, Power and EnergyRakesh Singh kushwahaNo ratings yet
- Formula Rio FinalDocument3 pagesFormula Rio FinalAngel Ramirez MartinezNo ratings yet
- المحاضرة 5Document15 pagesالمحاضرة 5عبدالله باسم خلاوي مانعNo ratings yet
- QualExam FA07 SolutionsDocument21 pagesQualExam FA07 SolutionsAakash GuptaNo ratings yet
- Bode Plots: 1 Control Lectures by Lubn MoinDocument30 pagesBode Plots: 1 Control Lectures by Lubn MoinSadaqat RizviNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Solutions 1Document6 pagesSolutions 1Christopher GalasNo ratings yet
- Heat Capacity of OrthoDocument8 pagesHeat Capacity of OrthoErşan AkalarNo ratings yet
- Branebh1 PresentationDocument19 pagesBranebh1 PresentationleoNo ratings yet
- Hints & Solutions : Main Pattern Part Test-2 (MPT-2)Document11 pagesHints & Solutions : Main Pattern Part Test-2 (MPT-2)Devansh VermaNo ratings yet
- 2.001 - Mechanics and Materials I Lecture #8 10/4/2006 Prof. Carol Livermore Recall From Last LectureDocument7 pages2.001 - Mechanics and Materials I Lecture #8 10/4/2006 Prof. Carol Livermore Recall From Last LectureAHMEDNo ratings yet
- Feynman Lectures Simplified 2B: Magnetism & ElectrodynamicsFrom EverandFeynman Lectures Simplified 2B: Magnetism & ElectrodynamicsNo ratings yet
- Question Bank MOD and Indefinite IntegrationDocument15 pagesQuestion Bank MOD and Indefinite IntegrationRAKTIM ROUTHNo ratings yet
- Chapter 4.3 Part 1 Circular Functions PDFDocument4 pagesChapter 4.3 Part 1 Circular Functions PDFjiiNo ratings yet
- Stg. 2 Math Methods - SACE Subject OutlineDocument49 pagesStg. 2 Math Methods - SACE Subject OutlineMatthew RumleyNo ratings yet
- ch04 Trigonometry From Text BookDocument62 pagesch04 Trigonometry From Text BookVikram JohariNo ratings yet
- Math 147 COURSE CALENDAR Q2 2022 - 2023Document2 pagesMath 147 COURSE CALENDAR Q2 2022 - 2023Mae Ann SacayNo ratings yet
- IA-09multiple and Sub Multiple Angles (45-47)Document2 pagesIA-09multiple and Sub Multiple Angles (45-47)eamcetmaterials100% (4)
- Mathematics-I - Bridge CourseDocument30 pagesMathematics-I - Bridge CourseSINNAPPARAJ SNo ratings yet
- Alejandro 2 - Solution MATH PDFDocument2 pagesAlejandro 2 - Solution MATH PDFAlliah Mae OrtegaNo ratings yet
- James Ruse 2010 4U CT1 & SolutionsDocument12 pagesJames Ruse 2010 4U CT1 & SolutionsmemeNo ratings yet
- Mcgill University Faculty of Science Department of Mathematics and StatisticsDocument45 pagesMcgill University Faculty of Science Department of Mathematics and StatisticsjackNo ratings yet
- CM Monthly Test - XII - Test 5 - 13.06.2016Document21 pagesCM Monthly Test - XII - Test 5 - 13.06.2016Rishabh GuptaNo ratings yet
- Papers DownloadDocument81 pagesPapers DownloadHans SchauerNo ratings yet
- CORDIC Algorithm For Sinusoidal CalculationsDocument6 pagesCORDIC Algorithm For Sinusoidal CalculationsijeteeditorNo ratings yet
- Ch3 ODEDocument23 pagesCh3 ODEAlaa TelfahNo ratings yet
- Adobe Scan 27-Sep-2022Document7 pagesAdobe Scan 27-Sep-2022CREATIVE XNo ratings yet
- Mathematics: PAPER 1 Pure Mathematics 1 (P1)Document8 pagesMathematics: PAPER 1 Pure Mathematics 1 (P1)Private of ScienceNo ratings yet
- B.sc. Mathematics SyllabusDocument25 pagesB.sc. Mathematics SyllabusDeepak NagwanshiNo ratings yet
- x' = xcosθ − ysinθ y' = xsinθ + ycosθ: RotationDocument3 pagesx' = xcosθ − ysinθ y' = xsinθ + ycosθ: RotationMuhammad IzaanNo ratings yet
- Class 11 MATHSDocument2 pagesClass 11 MATHSAbhimanyu AbhirajNo ratings yet
- Math 21 Exercise Set 13 - The Mean Value Theorem Relative ExtremaDocument3 pagesMath 21 Exercise Set 13 - The Mean Value Theorem Relative ExtremaAllen Lois LanuzaNo ratings yet
- FBISE Mathematics HSSC-I Model Question Paper 2022Document10 pagesFBISE Mathematics HSSC-I Model Question Paper 2022Muhammad ZafarullahNo ratings yet
- CalculusDocument360 pagesCalculusJuan Luis Leiva Torres50% (4)
- Math FormulasDocument66 pagesMath Formulas抓愛恰No ratings yet
- MTH111Document2 pagesMTH111UMUKORO ZEBULUNNo ratings yet
- Calculus For Engineers, 4th EditionDocument1,216 pagesCalculus For Engineers, 4th EditionAlden Stone100% (2)
- Course Outline in Math 10Document2 pagesCourse Outline in Math 10ASV ARTS channelNo ratings yet
- Emf Theory D 2Document231 pagesEmf Theory D 2kgrhoadsNo ratings yet
- Questions & Solutions: Gujcet 2020 (Mathematics)Document10 pagesQuestions & Solutions: Gujcet 2020 (Mathematics)『FAME』 么PRONo ratings yet
- Trigonometric Equations One Shot BouncebackDocument113 pagesTrigonometric Equations One Shot BouncebackdhairyashahNo ratings yet