You might also like
- Print PDFDocument15 pagesPrint PDFSachin AngadiNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Motor Star Delta ConnectionDocument11 pagesMotor Star Delta ConnectionsubirmeNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionDocument6 pagesTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806No ratings yet
- DC MachineDocument20 pagesDC MachineTammanurRaviNo ratings yet
- Modelling and Simulation: Wind Turbine GeneratorDocument7 pagesModelling and Simulation: Wind Turbine GeneratorEléctrico IngenieríaNo ratings yet
- AEEE 352 Assignment 3Document10 pagesAEEE 352 Assignment 3mchris91No ratings yet
- PE Lecture No.08 PDFDocument15 pagesPE Lecture No.08 PDFmonish halder100% (2)
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- Experiment 04Document7 pagesExperiment 04Zeynal Abidin ŞabaşNo ratings yet
- PSCAD Based Dynamic ModelingDocument7 pagesPSCAD Based Dynamic ModelingLalith KrishnanNo ratings yet
- DC Motors Speed Control - ModDocument9 pagesDC Motors Speed Control - ModAnuja VargheseNo ratings yet
- DC MotorDrivesDocument24 pagesDC MotorDrivesyohannes getachewNo ratings yet
- Objective: Fig 1. Left Hand RuleDocument11 pagesObjective: Fig 1. Left Hand RuleShahir Afif IslamNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- IEEE Transactions On Conversion, Vol. 8, No. 1, 1993Document7 pagesIEEE Transactions On Conversion, Vol. 8, No. 1, 1993doud98No ratings yet
- 2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1Document6 pages2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1ashikhmd4467No ratings yet
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 pagesPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- Single-Phase Induction Motor Adjustable Speed Drive: Direct Phase Angle Control of The Auxiliary Winding SupplyDocument7 pagesSingle-Phase Induction Motor Adjustable Speed Drive: Direct Phase Angle Control of The Auxiliary Winding SupplyMega Firdausi NuzullaNo ratings yet
- Electrical Machines Lab ManualDocument41 pagesElectrical Machines Lab Manualsohaib hashmatNo ratings yet
- Fixed Pitch Wind Turbine Emulator Using A DC Motor and A Series ResistorDocument9 pagesFixed Pitch Wind Turbine Emulator Using A DC Motor and A Series ResistorMuthu Kumar SubramanianNo ratings yet
- The Direct Current (DC) Motor - Principle of OperationDocument5 pagesThe Direct Current (DC) Motor - Principle of OperationEdison EstrellaNo ratings yet
- Wind Electric Generators and Control: Isha T.BDocument9 pagesWind Electric Generators and Control: Isha T.BeuginepaulNo ratings yet
- Electrical Braking of Large Wind TurbinesDocument11 pagesElectrical Braking of Large Wind Turbineslaaloo41No ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- SVC ModeloDocument4 pagesSVC ModeloLuc JeanNo ratings yet
- Chapter 5Document34 pagesChapter 5Jayshon Montemayor100% (1)
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranNo ratings yet
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesDocument7 pagesModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilNo ratings yet
- ECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC MotorDocument6 pagesECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC Motorapi-241454978No ratings yet
- Compressor Types, ClassificationDocument12 pagesCompressor Types, ClassificationNagaraj SubbiahNo ratings yet
- Induction Motor Equivalent Circuit For Dynamic SimulationDocument6 pagesInduction Motor Equivalent Circuit For Dynamic Simulationmareymorsy2822No ratings yet
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- Modeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DDocument5 pagesModeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DSundaraPandiyanNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- Ac 2011-1439: Fuzzy Logic-Based PMDC Motor Controller - An Undergraduate Student ProjectDocument13 pagesAc 2011-1439: Fuzzy Logic-Based PMDC Motor Controller - An Undergraduate Student ProjectFlorin CiudinNo ratings yet
- Paper ID 105Document6 pagesPaper ID 105hassenbbNo ratings yet
- DC Motor and ResultDocument5 pagesDC Motor and ResultSomashekhar SNo ratings yet
- Machine by BhimraDocument5 pagesMachine by BhimraAnonymous m8oCtJBNo ratings yet
- Project AC MachinesDocument5 pagesProject AC MachinessurjanshkNo ratings yet
- Simulation of DFIG Wind Turbines Ride Through CapabilityDocument9 pagesSimulation of DFIG Wind Turbines Ride Through CapabilityDanny LiNo ratings yet
- DC Motors: Characteristics, Control, ApplicationsDocument16 pagesDC Motors: Characteristics, Control, ApplicationsBelayet RonyNo ratings yet
- Industrial Machines IiDocument26 pagesIndustrial Machines IiIsaac KimaruNo ratings yet
- D.C control matlab روكانDocument17 pagesD.C control matlab روكانMustafa AlhumayreNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- DC Motor DrivesDocument35 pagesDC Motor DrivesMahua ChandaNo ratings yet
- Lab Manual Load - Test - On - DC - Shunt - Motor PDFDocument8 pagesLab Manual Load - Test - On - DC - Shunt - Motor PDFfongNo ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Engineering Lab 5 Machine Lab Lab 1 ReportDocument9 pagesEngineering Lab 5 Machine Lab Lab 1 Reportram010No ratings yet
- Black Box" Model For DC-fed Trains Equipped With VSI Traction Drives and Three-Phase Induction MotorsDocument19 pagesBlack Box" Model For DC-fed Trains Equipped With VSI Traction Drives and Three-Phase Induction MotorsCPiresNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- ASSIGNMENT Elektric q1-q3Document16 pagesASSIGNMENT Elektric q1-q3Nur Aisyah ZainuddinNo ratings yet
- A Stand-Alone Generating System Using Self-Excited Induction Generators in The Extraction of Petroleum ProductsDocument8 pagesA Stand-Alone Generating System Using Self-Excited Induction Generators in The Extraction of Petroleum ProductsPraveen KumarNo ratings yet
- Traction Induction Drive For Railway CHUEV DenisDocument9 pagesTraction Induction Drive For Railway CHUEV DenisPABLO MAURONo ratings yet
- DcdrivesDocument17 pagesDcdrivesMogaka LucasNo ratings yet
- 480 586 1 PBDocument6 pages480 586 1 PBapi-261065870No ratings yet
- All 2 Marks emDocument54 pagesAll 2 Marks emSathishNo ratings yet
- Qual Exam 2005Document31 pagesQual Exam 2005Kevin Lius BongNo ratings yet
- IgE Level Effect of Phyllanthus Acidus Leaf ExtractDocument5 pagesIgE Level Effect of Phyllanthus Acidus Leaf Extractkhatami muhammadNo ratings yet
- Diebold ManualDocument2 pagesDiebold Manualjoseperezlopes069No ratings yet
- Problems On Heat Transfer ConductionDocument3 pagesProblems On Heat Transfer ConductionGenerale, Rey marck C.No ratings yet
- Chapter 5: Operating System, Quiz With AnswersDocument14 pagesChapter 5: Operating System, Quiz With AnswersAden Kheire Mohamed100% (1)
- John Deere 772d 6wd GraderDocument6 pagesJohn Deere 772d 6wd GraderyaserattiaNo ratings yet
- Mechanical Technology Concepts: Applied ThermodynamicsDocument45 pagesMechanical Technology Concepts: Applied ThermodynamicsLe0 GamingNo ratings yet
- HM130 5Document1 pageHM130 5AntonelloNo ratings yet
- Product Manual For Resilient Seated Cast Iron Air Relief Valves For Water Works Purposes ACCORDING TO IS 14845: 2000Document5 pagesProduct Manual For Resilient Seated Cast Iron Air Relief Valves For Water Works Purposes ACCORDING TO IS 14845: 2000Tanmoy DuttaNo ratings yet
- Jennings 1978Document9 pagesJennings 1978Jacob Luttrell100% (1)
- Chapter 7 MCDADocument26 pagesChapter 7 MCDARosmira Natasha Binti RosleeNo ratings yet
- CH1 The Foundations - Logic and ProofsDocument106 pagesCH1 The Foundations - Logic and ProofsMOHAMED BACHARNo ratings yet
- Ray OpticsDocument41 pagesRay OpticsHannah VsNo ratings yet
- Spe 58987 Propped Fracturing in Gas Carbonate Formations MexicoDocument12 pagesSpe 58987 Propped Fracturing in Gas Carbonate Formations MexicoJose Gregorio FariñasNo ratings yet
- Chapter 5 Lennard Jones PotentialDocument6 pagesChapter 5 Lennard Jones PotentialMuhamad RayhanNo ratings yet
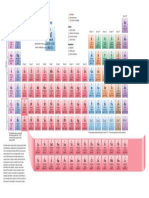
- Periodic TableDocument1 pagePeriodic TableChemist MookaNo ratings yet
- A Stated-Preference Study of The Willingness-To-Pay To Reduce Traffic Risk in Urban vs. Rural RoadsDocument13 pagesA Stated-Preference Study of The Willingness-To-Pay To Reduce Traffic Risk in Urban vs. Rural RoadsSantanu KumarNo ratings yet
- Slides-Developing Owner Cost Estimate PDFDocument117 pagesSlides-Developing Owner Cost Estimate PDFDedi JuherdiNo ratings yet
- Basic Probability and Reliability Concepts: Roy Billinton Power System Research Group University of Saskatchewan CanadaDocument248 pagesBasic Probability and Reliability Concepts: Roy Billinton Power System Research Group University of Saskatchewan CanadaSimon van BentenNo ratings yet
- TC 1800 QI 1 1 0 (User Manual)Document25 pagesTC 1800 QI 1 1 0 (User Manual)Emman JimenezNo ratings yet
- Smart AntennasDocument40 pagesSmart AntennasMeeraNo ratings yet
- Symmetric GroupDocument13 pagesSymmetric GroupPriyanka PatelNo ratings yet
- Introduction To Probability: Business Statistics: Communicating With Numbers, 4eDocument52 pagesIntroduction To Probability: Business Statistics: Communicating With Numbers, 4eRetno Ajeng Anissa WidiatriNo ratings yet
- Service Manual Trucks: Fault Codes Tachograph Tac-Dig, Tac-Dig2Document70 pagesService Manual Trucks: Fault Codes Tachograph Tac-Dig, Tac-Dig2Deny Adi IrawanNo ratings yet
- Green Building Store MVHR Brochure-File032484Document9 pagesGreen Building Store MVHR Brochure-File032484Anthi ValavaniNo ratings yet
- LRFD Design ExampleDocument698 pagesLRFD Design ExampleCesar RomeroNo ratings yet
- Unit2.SP - Mill.setting and ImbibitionDocument15 pagesUnit2.SP - Mill.setting and ImbibitionHari kantNo ratings yet
- Structural Design of Penstock - Criteria: Indian StandardDocument21 pagesStructural Design of Penstock - Criteria: Indian StandardAlok KumarNo ratings yet
- PDCT - Hydraulic Torque Wrench - Hangzhou Penad Machinery Co.,LtdDocument4 pagesPDCT - Hydraulic Torque Wrench - Hangzhou Penad Machinery Co.,LtdQS BMDSNo ratings yet
- Effort Distribution On Waterfall and AgileDocument12 pagesEffort Distribution On Waterfall and Agileanandapramanik100% (2)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureFrom EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureRating: 3.5 out of 5 stars3.5/5 (48)
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Transmission Pipeline Calculations and Simulations ManualFrom EverandTransmission Pipeline Calculations and Simulations ManualRating: 4.5 out of 5 stars4.5/5 (10)
- Implementing an Integrated Management System (IMS): The strategic approachFrom EverandImplementing an Integrated Management System (IMS): The strategic approachRating: 5 out of 5 stars5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksFrom EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNo ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- Air-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&AFrom EverandAir-Cooled Condenser Fundamentals: Design, Operations, Troubleshooting, Maintenance, and Q&ARating: 5 out of 5 stars5/5 (1)