You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Measur MentsDocument7 pagesMeasur MentsSaumya HeendeniyaNo ratings yet
- FE Simulation of Ultrasonic Vibrations in TurningDocument11 pagesFE Simulation of Ultrasonic Vibrations in TurningklausoshoNo ratings yet
- BSC Hs Physics Semester I To Vi CbcegsDocument43 pagesBSC Hs Physics Semester I To Vi CbcegsGerald BrightNo ratings yet
- Practical Viva PhysicsDocument4 pagesPractical Viva PhysicsPulkit JainNo ratings yet
- S3 My WoW Live Hot Air Balloons Pupil WorksheetV2Document5 pagesS3 My WoW Live Hot Air Balloons Pupil WorksheetV2Dennis Gabriel WuNo ratings yet
- Bioseparation EngineeringDocument91 pagesBioseparation EngineeringDiego SanzNo ratings yet
- Main Plnat Wind LoadDocument780 pagesMain Plnat Wind LoadArmie May RicoNo ratings yet
- Adss Cables For High Voltage InstallationsDocument4 pagesAdss Cables For High Voltage Installations199311056No ratings yet
- 2 MultiBody DynamicsDocument22 pages2 MultiBody Dynamicsbiruk1No ratings yet
- Experiment 1Document30 pagesExperiment 1Chan Chun ChenNo ratings yet
- Solid State Control of Synchronous Motor & PMSMDocument42 pagesSolid State Control of Synchronous Motor & PMSMNitish50% (2)
- Class 12 Physics Chapter 1Document11 pagesClass 12 Physics Chapter 1Garry BroNo ratings yet
- History-Triumph of AC. 2. The Battle of The Currents PDFDocument4 pagesHistory-Triumph of AC. 2. The Battle of The Currents PDFAshish MehtaNo ratings yet
- Catalogo AbbDocument114 pagesCatalogo AbbNia_s2No ratings yet
- 2020-Physical-Sciences-Grade-11-Vectors, MotionDocument68 pages2020-Physical-Sciences-Grade-11-Vectors, MotionJoyce ChikwaNo ratings yet
- Investigatory Projects With Alloted StudentDocument2 pagesInvestigatory Projects With Alloted Studentparth sethi0% (1)
- 288559883-Gr 12 Physics - Definitions and LawsDocument15 pages288559883-Gr 12 Physics - Definitions and Lawstaahirgaffor1No ratings yet
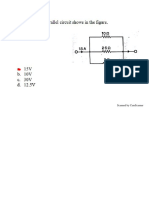
- L LL L: The Vo Tage Across The para e Circuit Shows The FigureDocument50 pagesL LL L: The Vo Tage Across The para e Circuit Shows The Figure4630220No ratings yet
- KuramoDocument6 pagesKuramoMastok SamadNo ratings yet
- 12 Class Physics 1-Chapter Sample Paper PDFDocument9 pages12 Class Physics 1-Chapter Sample Paper PDFharshNo ratings yet
- Insulation Resistance Tester (Megohmmeter) : Submitted To: Mr. Jayson Platino Submitted By: Junno Androcarlo VivaresDocument8 pagesInsulation Resistance Tester (Megohmmeter) : Submitted To: Mr. Jayson Platino Submitted By: Junno Androcarlo Vivaresjayson platinoNo ratings yet
- Unsteady Combustor PhysicsDocument475 pagesUnsteady Combustor Physicsgegelelolo100% (3)
- Batch 3 Report 18.06.22Document68 pagesBatch 3 Report 18.06.22Sujesh ChittarikkalNo ratings yet
- 5 DielectricsDocument9 pages5 DielectricsSuryaNo ratings yet
- T R R C: Example 6Document3 pagesT R R C: Example 6sethuraghulNo ratings yet
- An Optimized Three-Phase Multilevel Inverter Topology With Separate Level and Phase Sequence Generation PartDocument26 pagesAn Optimized Three-Phase Multilevel Inverter Topology With Separate Level and Phase Sequence Generation PartNaga AnanthNo ratings yet
- An Assignment On FrictionDocument15 pagesAn Assignment On FrictionWasiur Rahman100% (1)
- 3.7.5.2 Moving Charges in A Magnetic FieldDocument67 pages3.7.5.2 Moving Charges in A Magnetic Fieldtheolamey1No ratings yet
- Shell Momentum Balance 1Document16 pagesShell Momentum Balance 1Kevwe Macaulay -GbogidiNo ratings yet
- User Manual T200A EN V3.05Document56 pagesUser Manual T200A EN V3.05Sunil LimayeNo ratings yet