You might also like
- Jharkhand Steel Casting CompaniesDocument6 pagesJharkhand Steel Casting CompaniesCatherine Jovita50% (2)
- Bahasa InggrisDocument8 pagesBahasa InggrisArintaChairaniBanurea33% (3)
- Canna DispensariesDocument35 pagesCanna DispensariesWaf Etano100% (1)
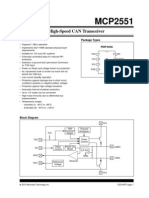
- High-Speed CAN Transceiver: Features Package TypesDocument23 pagesHigh-Speed CAN Transceiver: Features Package TypesSe SavNo ratings yet
- MCP 2551Document20 pagesMCP 2551Duy KhaNo ratings yet
- High-Speed CAN Transceiver: Features Package TypesDocument24 pagesHigh-Speed CAN Transceiver: Features Package TypeswhcallegariNo ratings yet
- MCP 2561Document30 pagesMCP 2561ZaegorNo ratings yet
- Multi-Phase DC/DC Controller For CPU Core Power Supply: General Description FeaturesDocument14 pagesMulti-Phase DC/DC Controller For CPU Core Power Supply: General Description FeaturesTeles SilvaNo ratings yet
- Max 14866Document23 pagesMax 14866hibluedeerNo ratings yet
- Max 7032Document32 pagesMax 7032vcdNo ratings yet
- Can Driver Ram 2005 Ecus Marco EsteliDocument27 pagesCan Driver Ram 2005 Ecus Marco EsteliautocomputerNo ratings yet
- Tja1040t PDFDocument18 pagesTja1040t PDF81968No ratings yet
- Can Transceiver: FeaturesDocument19 pagesCan Transceiver: Featuresjose luisNo ratings yet
- Can Transceiver: FeaturesDocument19 pagesCan Transceiver: FeaturesSukandar TeaNo ratings yet
- AND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Document19 pagesAND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Jonatan LunaNo ratings yet
- ECEN720 Lecture 5: TX Driver Circuits and Multiplexing TechniquesDocument41 pagesECEN720 Lecture 5: TX Driver Circuits and Multiplexing TechniquesMohamed MegahedNo ratings yet
- Max 8729Document26 pagesMax 8729lagreta55No ratings yet
- Types of PsuDocument50 pagesTypes of PsusubhajitNo ratings yet
- Max 11100Document21 pagesMax 11100Om VermaNo ratings yet
- MAX2411ADocument14 pagesMAX2411AalperencoskunNo ratings yet
- Description Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeDocument8 pagesDescription Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeLuisNo ratings yet
- A82C251Document16 pagesA82C251el_george0079491No ratings yet
- RF LDMOS Wideband Integrated Power Amplifier: MHV5IC1810NR2Document17 pagesRF LDMOS Wideband Integrated Power Amplifier: MHV5IC1810NR2mohsengsmNo ratings yet
- A82C250Document20 pagesA82C250AdamNo ratings yet
- ECEN720: High-Speed Links Circuits and Systems Spring 2021: Lecture 5: Termination, TX Driver, & Multiplexer CircuitsDocument66 pagesECEN720: High-Speed Links Circuits and Systems Spring 2021: Lecture 5: Termination, TX Driver, & Multiplexer Circuits陈晨No ratings yet
- LIN Transceiver: Automotive and IndustrialDocument19 pagesLIN Transceiver: Automotive and IndustrialRayan88No ratings yet
- Multi-Output Power Supplies With Vcom Amplifier and High-Voltage Gamma Reference For LCD Tvs Max17126BDocument34 pagesMulti-Output Power Supplies With Vcom Amplifier and High-Voltage Gamma Reference For LCD Tvs Max17126BFrank GomezNo ratings yet
- Tja 1040Document22 pagesTja 1040AlainbravopaezNo ratings yet
- Data Sheet: High Speed CAN TransceiverDocument17 pagesData Sheet: High Speed CAN TransceiverGautam PrashantNo ratings yet
- CAN Interface: Prototype InformationDocument8 pagesCAN Interface: Prototype InformationjahenNo ratings yet
- Max15058 PDFDocument22 pagesMax15058 PDFjhnkerenNo ratings yet
- CAN Transceiver Portfolio GuideDocument9 pagesCAN Transceiver Portfolio GuideOscar AlizaresNo ratings yet
- mcp4725 PDFDocument50 pagesmcp4725 PDFGessa BulaongNo ratings yet
- Driving LVPECL, LVDS, CML and SSTL Logic With IDT's "Universal" Low-Power HCSL OutDocument14 pagesDriving LVPECL, LVDS, CML and SSTL Logic With IDT's "Universal" Low-Power HCSL Outtian yuNo ratings yet
- Tja1041 PDFDocument26 pagesTja1041 PDFKeno0No ratings yet
- LM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationDocument24 pagesLM5642 High Voltage, Dual Synchronous Buck Converter With Oscillator SynchronizationcsclzNo ratings yet
- RFM12B: RFM12B Universal Ism Band FSK Transceiver ModuleDocument10 pagesRFM12B: RFM12B Universal Ism Band FSK Transceiver ModuleAMIR GHASEMINo ratings yet
- 1 General Description: Power Management IC For Low-Power Microcontroller ApplicationsDocument76 pages1 General Description: Power Management IC For Low-Power Microcontroller ApplicationsPham Ton VuNo ratings yet
- SN65HVD1050DR Texas InstrumentsDocument21 pagesSN65HVD1050DR Texas InstrumentsMoises HernandezNo ratings yet
- Tja1042 1Document27 pagesTja1042 1TOYS SQUARENo ratings yet
- Cargador Enercell cr623xDocument11 pagesCargador Enercell cr623xcuco777No ratings yet
- MAX4238-MAX4239 - AmplificadorDocument10 pagesMAX4238-MAX4239 - AmplificadorJeferson FraytagNo ratings yet
- Str-x6759n Ds enDocument9 pagesStr-x6759n Ds enCleiton SilvaNo ratings yet
- RF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1Document19 pagesRF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1bulli babuNo ratings yet
- 12-V Voltage Sensing Circuit With An Isolated AmplifierDocument8 pages12-V Voltage Sensing Circuit With An Isolated AmplifierSirJones KekapohNo ratings yet
- Lin Bus Transceiver: 1 FeaturesDocument14 pagesLin Bus Transceiver: 1 FeaturesDan EsentherNo ratings yet
- Can Transceiver: Features DescriptionDocument20 pagesCan Transceiver: Features Descriptionies837No ratings yet
- AC-DC LED Driver MT7930Document8 pagesAC-DC LED Driver MT7930Daniel GonzálezNo ratings yet
- RF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNDocument22 pagesRF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNISMAEL ALVEZNo ratings yet
- RF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNDocument22 pagesRF Power LDMOS Transistors: MRFE6VP61K25N MRFE6VP61K25GNASNANNo ratings yet
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- 921 MHZ - 960 MHZ Sifet RF Integrated Power Amplifier: Mhvic910Hr2Document11 pages921 MHZ - 960 MHZ Sifet RF Integrated Power Amplifier: Mhvic910Hr2Claudinei FigueiraNo ratings yet
- Finisar ftlx6672mcc 10g DWDM 40km Multi-Rate T-SFP Optical Transceiver Product Spec Reva02Document15 pagesFinisar ftlx6672mcc 10g DWDM 40km Multi-Rate T-SFP Optical Transceiver Product Spec Reva02Lelik GhhNo ratings yet
- LM2825 Integrated Power Supply 1A DC-DC Converter: General Description FeaturesDocument12 pagesLM2825 Integrated Power Supply 1A DC-DC Converter: General Description FeaturesSorin AlexandruNo ratings yet
- 2.7V Dual Channel 10-Bit A/D Converter With SPI Serial InterfaceDocument34 pages2.7V Dual Channel 10-Bit A/D Converter With SPI Serial InterfaceVed Shekhar GowdaNo ratings yet
- APW8868C: Features General DescriptionDocument26 pagesAPW8868C: Features General DescriptionFelix BlancoNo ratings yet
- LM6172 Dual High Speed, Low Power, Low Distortion, Voltage Feedback AmplifiersDocument16 pagesLM6172 Dual High Speed, Low Power, Low Distortion, Voltage Feedback AmplifiersGerasymNo ratings yet
- A2t20h160w04n 1517293Document12 pagesA2t20h160w04n 1517293PalmNo ratings yet
- Max2686 Max2688 271345Document9 pagesMax2686 Max2688 271345Petrisor CristianNo ratings yet
- Programmable DC/DC Controller For Advanced Microprocessors: Device Package Temp Range (T)Document6 pagesProgrammable DC/DC Controller For Advanced Microprocessors: Device Package Temp Range (T)ibrahim başderNo ratings yet
- DatasheetDocument22 pagesDatasheetHitachiNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Ais 018 2Document15 pagesAis 018 2senguttuvelNo ratings yet
- Gas Sensor CommonDocument12 pagesGas Sensor CommonsenguttuvelNo ratings yet
- A Long-Range, Wide Field-Of-View Infrared Eyeblink DetectorDocument9 pagesA Long-Range, Wide Field-Of-View Infrared Eyeblink Detectormanoece54No ratings yet
- CC2500 Module Specification from AND TechnologiesDocument3 pagesCC2500 Module Specification from AND TechnologiessenguttuvelNo ratings yet
- How To Oven and Sun Dry Meat and ProduceDocument12 pagesHow To Oven and Sun Dry Meat and ProduceLes BennettNo ratings yet
- Clustering Social Network GraphsDocument12 pagesClustering Social Network GraphsRáhùl SréédhãrNo ratings yet
- F&B Data Analyst Portfolio ProjectDocument12 pagesF&B Data Analyst Portfolio ProjectTom HollandNo ratings yet
- RA 5921 and RA 10918Document32 pagesRA 5921 and RA 10918Hani Loveres100% (1)
- Science Web 2014Document40 pagesScience Web 2014Saif Shahriar0% (1)
- Rethinking Classification and Localization For Object DetectionDocument13 pagesRethinking Classification and Localization For Object DetectionShah Nawaz KhanNo ratings yet
- China Sichuan Province Se'Ergu Hydro Power Project PDD 20080821Document50 pagesChina Sichuan Province Se'Ergu Hydro Power Project PDD 20080821akhilkuwarNo ratings yet
- SomDocument191 pagesSomVivek GosaviNo ratings yet
- PS Neo HSK2LCD ICON LED RF Keypad v1 0 Installation Guide R001 en FR Es PoDocument40 pagesPS Neo HSK2LCD ICON LED RF Keypad v1 0 Installation Guide R001 en FR Es Po7seguridadNo ratings yet
- Occupant Load CalculationsDocument60 pagesOccupant Load CalculationsKAIVALYA TIWATNENo ratings yet
- Gantt Chart Engr110 - Gantt Chart Template 3Document1 pageGantt Chart Engr110 - Gantt Chart Template 3api-375485735No ratings yet
- 20comm Um003 - en PDocument270 pages20comm Um003 - en PRogério BotelhoNo ratings yet
- Degree and Order of ODEDocument7 pagesDegree and Order of ODEadiba adibNo ratings yet
- BBRC4103 - Research MethodologyDocument14 pagesBBRC4103 - Research MethodologySimon RajNo ratings yet
- Oxy AcetyleneDocument43 pagesOxy Acetyleneregupathi100% (1)
- Transformer InsulationDocument14 pagesTransformer InsulationcjtagayloNo ratings yet
- The German eID-Card by Jens BenderDocument42 pagesThe German eID-Card by Jens BenderPoomjit SirawongprasertNo ratings yet
- Topic1 Whole NumberDocument22 pagesTopic1 Whole NumberDayang Siti AishahNo ratings yet
- Turabian Sample PaperDocument9 pagesTurabian Sample Paperemme_lopez908133% (3)
- Assessment in Southeast AsiaDocument17 pagesAssessment in Southeast AsiathuckhuyaNo ratings yet
- Journal 082013Document100 pagesJournal 082013Javier Farias Vera100% (1)
- Parking Garage LED Retrofit - 1 - Lighting-Guide - Rev.082015 PDFDocument2 pagesParking Garage LED Retrofit - 1 - Lighting-Guide - Rev.082015 PDFmonsNo ratings yet
- The Case of Ataraxia and Apraxia in The Development of Skeptic THDocument11 pagesThe Case of Ataraxia and Apraxia in The Development of Skeptic THeweNo ratings yet
- How To Install Windows XP From Pen Drive Step by Step GuideDocument3 pagesHow To Install Windows XP From Pen Drive Step by Step GuideJithendra Kumar MNo ratings yet
- Chapter 7 - The Political SelfDocument6 pagesChapter 7 - The Political SelfJohn Rey A. TubieronNo ratings yet
- Manual de Instruções Iveco Eurocargo Euro 6Document226 pagesManual de Instruções Iveco Eurocargo Euro 6rsp filmes100% (1)
- Self ReflectivityDocument7 pagesSelf ReflectivityJoseph Jajo100% (1)