You might also like
- Analysis of Dielectric ResponseDocument221 pagesAnalysis of Dielectric ResponsearunjothiNo ratings yet
- Least Mean Square Adaptive FiltersDocument502 pagesLeast Mean Square Adaptive FiltersEko WahyudeNo ratings yet
- Boukamp 2020 J. Phys. Energy 2 042001Document25 pagesBoukamp 2020 J. Phys. Energy 2 042001Jayveer JoshiNo ratings yet
- Lab 6 Microstrip Patch AntennaDocument7 pagesLab 6 Microstrip Patch AntennaMuhammad KaleemNo ratings yet
- MC0082 - Theory of Computer ScienceDocument235 pagesMC0082 - Theory of Computer SciencePurushottam KumarNo ratings yet
- Sample SOPDocument2 pagesSample SOPnikNo ratings yet
- Physical Characteristics of Optical FibersDocument7 pagesPhysical Characteristics of Optical Fibersjasmine-rNo ratings yet
- Orazem EIS Spring 2008Document306 pagesOrazem EIS Spring 2008Bangkit Rachmat HilcaNo ratings yet
- Made Easy Test Series For ECE TEst - 15Document4 pagesMade Easy Test Series For ECE TEst - 15Ankur PandeyNo ratings yet
- Design of UpsamplerDocument7 pagesDesign of Upsamplerprasu440No ratings yet
- Experiment2 AFMDocument10 pagesExperiment2 AFMMuhammad MiqdadNo ratings yet
- Anomaly Detection - AzureDocument115 pagesAnomaly Detection - AzureVBuga84No ratings yet
- K PDocument15 pagesK Palokesh1982No ratings yet
- ch11 PDFDocument43 pagesch11 PDFmri_leon100% (1)
- Low-Cost Dual-Band E-Shaped Patch Antenna For Energy Harvesting Applications Using Grey Wolf OptimizerDocument5 pagesLow-Cost Dual-Band E-Shaped Patch Antenna For Energy Harvesting Applications Using Grey Wolf Optimizermubeen khanNo ratings yet
- cs224n 2017 Notes3Document18 pagescs224n 2017 Notes3Du PhanNo ratings yet
- EEE 202 Final Lab ReportDocument8 pagesEEE 202 Final Lab ReportTJ SmithNo ratings yet
- Problems Nanophysics IDocument4 pagesProblems Nanophysics ImaikosNo ratings yet
- Physical Chemistry Homework HelpDocument14 pagesPhysical Chemistry Homework HelpEdu Assignment Help100% (1)
- 1 Practical Applications of Electromagnetism PDFDocument10 pages1 Practical Applications of Electromagnetism PDFChunesh BhallaNo ratings yet
- Solution Manual For Data Communications and Networking by Behrouz ForouzanDocument18 pagesSolution Manual For Data Communications and Networking by Behrouz ForouzanKoya Srinath100% (1)
- Lab 591 - B Analysis and Design of CSDocument2 pagesLab 591 - B Analysis and Design of CSDevine WriterNo ratings yet
- Successful New Design For The Fog HarpDocument2 pagesSuccessful New Design For The Fog HarpJohn OsborneNo ratings yet
- Average Values & Effective ValuesDocument11 pagesAverage Values & Effective ValuesDravid NagiNo ratings yet
- CS9077Document2 pagesCS9077Suraj Kandpal100% (1)
- Green's Functions For The Stretched String Problem: D. R. Wilton ECE DeptDocument34 pagesGreen's Functions For The Stretched String Problem: D. R. Wilton ECE DeptSri Nivas ChandrasekaranNo ratings yet
- Multirate Signal Processing: I. Selesnick EL 713 Lecture NotesDocument32 pagesMultirate Signal Processing: I. Selesnick EL 713 Lecture Notesboopathi123No ratings yet
- ComSys Lab-3 (Tuesday Batch)Document7 pagesComSys Lab-3 (Tuesday Batch)Anshul JainNo ratings yet
- 3.1 Analog MultipliersDocument17 pages3.1 Analog MultipliersMarykutty CyriacNo ratings yet
- Cs2403 Digital Signal Processing NotesDocument106 pagesCs2403 Digital Signal Processing NotesRaja SekarNo ratings yet
- ME1401 Finite Element AnalysisDocument10 pagesME1401 Finite Element AnalysisSarathiraja SekarNo ratings yet
- From Polymers To Plastics Problems and Solved ExercisesDocument93 pagesFrom Polymers To Plastics Problems and Solved ExercisesGonzalo MazaNo ratings yet
- Microwave&Optical Communications: Laboratory Manual (R10 Syllabus)Document43 pagesMicrowave&Optical Communications: Laboratory Manual (R10 Syllabus)Zareena Fathima100% (1)
- Computing For EngineeringDocument4 pagesComputing For Engineeringyuya42No ratings yet
- Nptel: Nanostructures and Nanomaterials: Characterization and Properties - Video CourseDocument2 pagesNptel: Nanostructures and Nanomaterials: Characterization and Properties - Video CoursealfreliaNo ratings yet
- Chapter-5.PDF Charan LangtonDocument32 pagesChapter-5.PDF Charan Langtonumair rasheedNo ratings yet
- Tech Note 01 - Extrapolation Using KK RelationsDocument13 pagesTech Note 01 - Extrapolation Using KK RelationsChaitanya RaiNo ratings yet
- S210Document86 pagesS210Sadullah AvdiuNo ratings yet
- Basics of Impedance Spectroscopy: ( 1% of The Entire Topic!)Document79 pagesBasics of Impedance Spectroscopy: ( 1% of The Entire Topic!)ManoranjanNo ratings yet
- AlexanderCh17final R1Document21 pagesAlexanderCh17final R1Salih InceNo ratings yet
- Digital Image Processing - DR - B.chandra MohanDocument63 pagesDigital Image Processing - DR - B.chandra MohanPriyaNo ratings yet
- 4 Sampling Quantization 0809Document13 pages4 Sampling Quantization 0809maricela_eliz453No ratings yet
- 04-Crystal LatticesDocument8 pages04-Crystal LatticesRendon labadorNo ratings yet
- Performance of Digital Communication LabDocument4 pagesPerformance of Digital Communication LabFrogie HuniebieNo ratings yet
- Eustaquio, John Patrick A. Prof. Leonilla Elemento MEE-21: Experiment 3: VariablesDocument4 pagesEustaquio, John Patrick A. Prof. Leonilla Elemento MEE-21: Experiment 3: VariablesJohn Patrick EustaquioNo ratings yet
- PTSP Notes Unit 4 PDFDocument5 pagesPTSP Notes Unit 4 PDFG S ArunNo ratings yet
- Jntua B.tech 3-1 Ece R15 PDFDocument26 pagesJntua B.tech 3-1 Ece R15 PDFLakshmi Naga SrivaniNo ratings yet
- Edx Signal Pro V7 3l PDFDocument2 pagesEdx Signal Pro V7 3l PDFBarbaraNo ratings yet
- Expt 3 Generation of Continous Signal CañeteDocument4 pagesExpt 3 Generation of Continous Signal CañeteJHUSTINE CAÑETENo ratings yet
- Digital Signal ProcessingDocument54 pagesDigital Signal Processingshivam vashistNo ratings yet
- Lock in Amp Redpitaya PDFDocument11 pagesLock in Amp Redpitaya PDFrobidjoNo ratings yet
- ELE 3203 Communication Systems: Student Name ID NumberDocument12 pagesELE 3203 Communication Systems: Student Name ID NumberKhawla AlameriNo ratings yet
- A Technical Seminar Report On Synthetic Aperture RadarDocument11 pagesA Technical Seminar Report On Synthetic Aperture RadarNethaji BalaramanNo ratings yet
- Carrier Transport PhenomenaDocument39 pagesCarrier Transport PhenomenaNagendra ManralNo ratings yet
- Optical Amplifier1Document8 pagesOptical Amplifier1Sunil FageriaNo ratings yet
- 14 NMDocument17 pages14 NMArvindGovaNo ratings yet
- Investigation On The Performance of Linear Antenna Array Synthesis Using Genetic AlgorithmDocument7 pagesInvestigation On The Performance of Linear Antenna Array Synthesis Using Genetic AlgorithmCyberJournals MultidisciplinaryNo ratings yet
- Due: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012Document3 pagesDue: Monday September 17: Homework 2 - Solution ECE 445 Biomedical Instrumentation, Fall 2012amastasia salsaNo ratings yet
- Signals & Systems Unit IDocument34 pagesSignals & Systems Unit ILoganathan LoguNo ratings yet
- Objectives: Signals in Natural Domain Chapter 1: IntroductionDocument10 pagesObjectives: Signals in Natural Domain Chapter 1: IntroductionsivatejamundlamuriNo ratings yet
- Electric Potential Energy & Electric PotentialDocument17 pagesElectric Potential Energy & Electric Potentialblismae genotivaNo ratings yet
- True and False Energy Saving DevicesDocument5 pagesTrue and False Energy Saving DevicesJose ANo ratings yet
- Technical Data of ABB Motor: TEFC/IC0141Document5 pagesTechnical Data of ABB Motor: TEFC/IC0141skzubsNo ratings yet
- Lecture No.7 - BridgeBearings - 2Document33 pagesLecture No.7 - BridgeBearings - 2Riffat Said100% (1)
- Specification For Pressure Vessel Plates, Alloy Steel, High-Strength, Quenched and TemperedDocument4 pagesSpecification For Pressure Vessel Plates, Alloy Steel, High-Strength, Quenched and TemperededwinbadajosNo ratings yet
- Flexural or Bending Test Lab ReportDocument9 pagesFlexural or Bending Test Lab ReportKalKatu MaLam73% (22)
- Hycox 20171116-A Yangzhou Hycox Industrial Co.,Ltd - BoliviaDocument3 pagesHycox 20171116-A Yangzhou Hycox Industrial Co.,Ltd - BoliviaCristian Sahonero MuñozNo ratings yet
- Necessary and Sufficient Conditions For Riemann and Riemann-Stieltjes IntegrabilityDocument10 pagesNecessary and Sufficient Conditions For Riemann and Riemann-Stieltjes IntegrabilityAloyana Couto da SilvaNo ratings yet
- Equivalent Weight QuestionsDocument3 pagesEquivalent Weight QuestionsMuzan NishiNo ratings yet
- Solubility Enhancement of Antihypertensive Agent by Solid Dispersion TechniqueDocument6 pagesSolubility Enhancement of Antihypertensive Agent by Solid Dispersion Techniquedini hanifaNo ratings yet
- Summary Mechanics of Materials HibbelerDocument10 pagesSummary Mechanics of Materials HibbelerWikki GohNo ratings yet
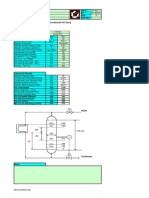
- Steam Condensate Pot SizingDocument1 pageSteam Condensate Pot SizingSaeid Rahimi Mofrad100% (1)
- Unit 4 Problems On Combined Bending and TorsionDocument8 pagesUnit 4 Problems On Combined Bending and TorsionAnonymous mRBbdopMKf100% (1)
- Chapter 01b Solar RadiationDocument40 pagesChapter 01b Solar RadiationOmar AljohaniNo ratings yet
- W3Document2 pagesW3Jerlyn AriateNo ratings yet
- Broadband Coax-Waveguide Transitions: T. Rizawa#, R. Pendleton Stanford Linear Accelerator Center, CA 94309, USADocument3 pagesBroadband Coax-Waveguide Transitions: T. Rizawa#, R. Pendleton Stanford Linear Accelerator Center, CA 94309, USAAstro MikeNo ratings yet
- BBP E Chapter 06Document8 pagesBBP E Chapter 06Danny CheongNo ratings yet
- Chapter 9 - Motion Along A Straight LinesDocument5 pagesChapter 9 - Motion Along A Straight Linesahmadkamil9286% (7)
- Cagsawa, Ryan I. (Sce101-10 Problems)Document7 pagesCagsawa, Ryan I. (Sce101-10 Problems)Ryan CagsawaNo ratings yet
- Avila Plate 2Document8 pagesAvila Plate 2Aljon AvilaNo ratings yet
- Búsqueda Del Medio - SEBU7898 - C18 Generator Set Cat Digital Voltage Regulator (Cat DVR)Document4 pagesBúsqueda Del Medio - SEBU7898 - C18 Generator Set Cat Digital Voltage Regulator (Cat DVR)CEVegaONo ratings yet
- Electromagnetic Induction and Alternating Current by AlienDocument13 pagesElectromagnetic Induction and Alternating Current by AlienSanatan KumarNo ratings yet
- Top 10 Fundamental Operational Amplifiers CircuitsDocument7 pagesTop 10 Fundamental Operational Amplifiers CircuitsNguyễnVănTuấnNo ratings yet
- Quadratic EquationsDocument4 pagesQuadratic EquationsSaraf santhosh kumarNo ratings yet
- Flender StandardCouplings FLE10 ENDocument376 pagesFlender StandardCouplings FLE10 ENRichard SilvaNo ratings yet
- Hole's Essentials of Human Anatomy & Physiology Twelfth Edition - Chapter 2 Lecture OutlineDocument52 pagesHole's Essentials of Human Anatomy & Physiology Twelfth Edition - Chapter 2 Lecture OutlineCharles Avila100% (1)
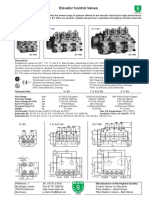
- Elevator Control Valves: EN ISO 9001Document6 pagesElevator Control Valves: EN ISO 9001Jibjab7No ratings yet
- Ultrasonic Level LST400: Open Channel Flow TransmitterDocument12 pagesUltrasonic Level LST400: Open Channel Flow TransmitterVaranasi AnilNo ratings yet
- "FINE" FS-8000 Weighing IndicatorDocument4 pages"FINE" FS-8000 Weighing IndicatorjoviNo ratings yet
- Application of Jute Fiber in Soil StabilizationDocument8 pagesApplication of Jute Fiber in Soil StabilizationMary Joy ManayagaNo ratings yet
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyFrom EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyNo ratings yet
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (410)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (157)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1396)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessFrom EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (57)
- What If?: Serious Scientific Answers to Absurd Hypothetical QuestionsFrom EverandWhat If?: Serious Scientific Answers to Absurd Hypothetical QuestionsRating: 5 out of 5 stars5/5 (5)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeRating: 4.5 out of 5 stars4.5/5 (3)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- A Natural History of Color: The Science Behind What We See and How We See itFrom EverandA Natural History of Color: The Science Behind What We See and How We See itRating: 4 out of 5 stars4/5 (13)
- Transform Your Life And Save The World: Through The Dreamed Of Arrival Of The Rehabilitating Biological Explanation Of The Human ConditionFrom EverandTransform Your Life And Save The World: Through The Dreamed Of Arrival Of The Rehabilitating Biological Explanation Of The Human ConditionRating: 5 out of 5 stars5/5 (2)
- Beyond Weird: Why Everything You Thought You Knew about Quantum Physics Is DifferentFrom EverandBeyond Weird: Why Everything You Thought You Knew about Quantum Physics Is DifferentRating: 4 out of 5 stars4/5 (25)
- Vibration and Frequency: How to Get What You Want in LifeFrom EverandVibration and Frequency: How to Get What You Want in LifeRating: 4.5 out of 5 stars4.5/5 (13)