You might also like
- Introduccion LabVIEWDocument13 pagesIntroduccion LabVIEWISRAEL AMADORNo ratings yet
- Trabajo Tolva ING-AUT 2008-09Document5 pagesTrabajo Tolva ING-AUT 2008-09ginergggNo ratings yet
- Acondicionadores de Señal PDFDocument58 pagesAcondicionadores de Señal PDFSthefaniia Garzon OliiverosNo ratings yet
- Modelos Matematicos y Funciones de TransferenciaDocument12 pagesModelos Matematicos y Funciones de TransferenciaFHERFFFNo ratings yet
- Unidad 1 Contro ElectricoDocument26 pagesUnidad 1 Contro ElectricoRuben Alvarez100% (1)
- Controles Sistema Automatico-Problema ResueltoDocument116 pagesControles Sistema Automatico-Problema ResueltoDaniel E. Taveras100% (1)
- CAP - Sistemas de Primer OrdenDocument37 pagesCAP - Sistemas de Primer OrdenAnonymous HdENZfRNo ratings yet
- Asignacion de PolosDocument12 pagesAsignacion de PolosMarlon Avila TarrilloNo ratings yet
- PPTGrafcetBasico 050319Document78 pagesPPTGrafcetBasico 050319josemusic23No ratings yet
- Métodos de Sintonización en Lazo CerradoDocument12 pagesMétodos de Sintonización en Lazo CerradoloFreDDNo ratings yet
- Modelado Matematico de SistemasDocument20 pagesModelado Matematico de SistemasCamilo GraciaNo ratings yet
- Labview EjerciciosDocument19 pagesLabview EjerciciosjulpaiNo ratings yet
- PLC PDFDocument33 pagesPLC PDFOsbaldoSolorzanoHerreraNo ratings yet
- M209 A1 GrafcetDocument32 pagesM209 A1 GrafcetBenjamín Muñoz Mariscal100% (1)
- Manual de Ejercicios Resueltos de PLC para Que El Prosor No Me Envie A VeranoDocument13 pagesManual de Ejercicios Resueltos de PLC para Que El Prosor No Me Envie A VeranoEleazar CosmeNo ratings yet
- Exposicion 2 Control OptimoDocument19 pagesExposicion 2 Control OptimoJhonatan Quintuña CordovaNo ratings yet
- 2 Tutorial Programación Labview PDFDocument83 pages2 Tutorial Programación Labview PDFAngel Eduardo Cruzado NuñezNo ratings yet
- Curso PLC em CastelianoDocument45 pagesCurso PLC em CastelianoCrhistian Jonathan Mallma CondorNo ratings yet
- Control DiscretoDocument47 pagesControl DiscretoCristobal Orlando Valenzuela RiosNo ratings yet
- infoPLC Net Guia 3 Instrucciones Basicas en Los Automatas ProgramablesDocument19 pagesinfoPLC Net Guia 3 Instrucciones Basicas en Los Automatas Programablesfuente perezNo ratings yet
- Tema 1112131415 PDFDocument94 pagesTema 1112131415 PDFGeovannyNo ratings yet
- ELECTRONEUMÁTICA MetodosDocument10 pagesELECTRONEUMÁTICA MetodosNicolas Delgado SaavedraNo ratings yet
- Control de Potencia Con El SCRDocument15 pagesControl de Potencia Con El SCRPipe CastilloNo ratings yet
- Aplicación Del Métodos Secuenciales en La Solución de Problemas de ElectroneumáticaDocument7 pagesAplicación Del Métodos Secuenciales en La Solución de Problemas de ElectroneumáticaGustavoHDoussetNo ratings yet
- Apuntes de Automatizacion. y ControlDocument171 pagesApuntes de Automatizacion. y ControlEduardo PobleteNo ratings yet
- Problemas Aut2!07!08Document5 pagesProblemas Aut2!07!08Rodrigo RamiroNo ratings yet
- E-322 Final-Mod1 PLC AvanzadoDocument130 pagesE-322 Final-Mod1 PLC AvanzadoHéctor CaríasNo ratings yet
- Files Descargas Siemens InfoPLC Net Guia4AUPG S7 200 GRAFCETDocument13 pagesFiles Descargas Siemens InfoPLC Net Guia4AUPG S7 200 GRAFCETanttonylordNo ratings yet
- Sistema Scada ListoDocument45 pagesSistema Scada ListomayolissNo ratings yet
- PLC s7-1200Document26 pagesPLC s7-1200Ramos CornelioNo ratings yet
- Sistemas de Control Digital 3 PDFDocument272 pagesSistemas de Control Digital 3 PDFRafa K-icedoNo ratings yet
- Automatica Problemas ResueltosDocument355 pagesAutomatica Problemas ResueltosAlexandro Diaz Coret0% (1)
- TP8 CompensadoresDocument4 pagesTP8 CompensadoresKarina CherbiyNo ratings yet
- Curso Arduino Con Matlab y LabVIEWDocument4 pagesCurso Arduino Con Matlab y LabVIEWAlan Aguilar100% (1)
- Problemas Propuestos Con Amplificadores OperacionalesDocument53 pagesProblemas Propuestos Con Amplificadores Operacionalesvhirgho13No ratings yet
- Practicas de Robotica Utilizando MatlabDocument2 pagesPracticas de Robotica Utilizando MatlabDiego E. Quimbert MontesNo ratings yet
- MANUAL DE PRACTICAS DE PLC Micro 1Document37 pagesMANUAL DE PRACTICAS DE PLC Micro 1Ramon GonzalezNo ratings yet
- 3ra Uniad Hidraulica y NeumaticaDocument21 pages3ra Uniad Hidraulica y NeumaticaManuel Alejandro Aguilar GuzmanNo ratings yet
- Ejercicios NeumaticaDocument7 pagesEjercicios NeumaticaLudwig AngelusNo ratings yet
- Observador de Estados para Un Motor DCDocument9 pagesObservador de Estados para Un Motor DCJoseph Manuel Chamochumbi IndaraNo ratings yet
- Modelado Matemático de Sistemas DinámicosDocument19 pagesModelado Matemático de Sistemas Dinámicospiwy017No ratings yet
- Ejemplos de BondGraphDocument69 pagesEjemplos de BondGraphDavid BandaNo ratings yet
- Espacio de Memoria PLC LOGO Siemens - LOGO!SoftDocument10 pagesEspacio de Memoria PLC LOGO Siemens - LOGO!SoftOliver Bertel100% (1)
- Modelo, Pendulo InvertidoDocument9 pagesModelo, Pendulo InvertidoJose VillamizarNo ratings yet
- Laboratorio 1 Control DigitalDocument9 pagesLaboratorio 1 Control DigitalCM35No ratings yet
- Ejercicios PLC 1 y 2Document9 pagesEjercicios PLC 1 y 2Joffre Calvopiña SegoviaNo ratings yet
- Motores Paso A PasoDocument33 pagesMotores Paso A PasoFrank Merello PortocarreroNo ratings yet
- Estructura Interna de Un PLC-IPN PDFDocument166 pagesEstructura Interna de Un PLC-IPN PDFezequiel2519No ratings yet
- Sistema de Automatizacion S7 200Document478 pagesSistema de Automatizacion S7 200Jhonny Zambrano SaavedraNo ratings yet
- Diagrama de Contacto KOPDocument212 pagesDiagrama de Contacto KOPErkes KaizerNo ratings yet
- Modeladoy SimulacionDocument36 pagesModeladoy Simulacionanblor71No ratings yet
- Practica - Funciones de TransferenciaDocument19 pagesPractica - Funciones de TransferenciaRafael Aguilar RiosNo ratings yet
- GRAFCETDocument30 pagesGRAFCETricardo gironNo ratings yet
- PLC y Diagrama de EscaleraDocument12 pagesPLC y Diagrama de EscaleraAminadab López Rangel100% (1)
- Mecatrónica: modelado, simulación y control de sistemas físicosFrom EverandMecatrónica: modelado, simulación y control de sistemas físicosNo ratings yet
- Laboratorio 5Document4 pagesLaboratorio 5Carlos Carrillo ZapataNo ratings yet
- Foro Seman 1 Iacc Sisrtema ControlsDocument3 pagesForo Seman 1 Iacc Sisrtema ControlsAlejandro AlvarezNo ratings yet
- Clasificacion de Los Controladores IndustrialesDocument9 pagesClasificacion de Los Controladores Industrialesignacio bazanNo ratings yet
- Informe #1 de Control de Procesos (Terminado)Document16 pagesInforme #1 de Control de Procesos (Terminado)Alex RuizNo ratings yet
- El Controlador PID BasicoDocument9 pagesEl Controlador PID BasicoAlex Rodríguez VelardeNo ratings yet
- Amidiq2014 PDFDocument6 pagesAmidiq2014 PDFJce SvuNo ratings yet
- Eliminacion de Cobre de Soluciones AlcalinasDocument7 pagesEliminacion de Cobre de Soluciones AlcalinasJce SvuNo ratings yet
- 02bDocument28 pages02bJorge AldoradinNo ratings yet
- 02bDocument28 pages02bJorge AldoradinNo ratings yet
- CucnDocument6 pagesCucnEder RaymeNo ratings yet
- La ElectrometaDocument16 pagesLa ElectrometaPuma Ayquipa Angel LuisNo ratings yet
- Fundamentos ElectroanaliticaDocument81 pagesFundamentos ElectroanaliticaHéctor LópezNo ratings yet
- ¿Para Qué Sirve La Religión, Richard DawkinsDocument8 pages¿Para Qué Sirve La Religión, Richard DawkinsMaria Muñeton AcevedoNo ratings yet
- El Mundo de Los Surf Act AntesDocument37 pagesEl Mundo de Los Surf Act AntesRosa Gpe. LestatNo ratings yet
- Memorias Xxi CimeDocument885 pagesMemorias Xxi CimeJce SvuNo ratings yet
- Cartel S&HDocument1 pageCartel S&HJce SvuNo ratings yet
- TmaparDocument21 pagesTmaparJce SvuNo ratings yet
- Maquina Sincrona de Barra InfinitaDocument16 pagesMaquina Sincrona de Barra InfinitaMijael PonceNo ratings yet
- Curso Cisco 6 NivelesDocument89 pagesCurso Cisco 6 NivelesDaniel MurilloNo ratings yet
- Muestra 05 - Revista Con-Ciencia y Tecnica 2022 2-42-46Document5 pagesMuestra 05 - Revista Con-Ciencia y Tecnica 2022 2-42-46Chuky MolinaNo ratings yet
- Metodos de SintonizacionDocument14 pagesMetodos de Sintonizacionejprieto100% (1)
- Desarrollo Laboratorio N°2 - CONTROL AVANZADO 2.0Document19 pagesDesarrollo Laboratorio N°2 - CONTROL AVANZADO 2.0YoverPerezPimentelNo ratings yet
- Acciones Básicas de ControlDocument7 pagesAcciones Básicas de ControlgabrielNo ratings yet
- 3er Laboratorio - de - Control - FINAL PDFDocument7 pages3er Laboratorio - de - Control - FINAL PDFIVAN ALONSO CCAHUACHIA LETONANo ratings yet
- CIRCUTOR Transf. de Grupos Electrogenos MA - 01 - EDocument16 pagesCIRCUTOR Transf. de Grupos Electrogenos MA - 01 - EJNENo ratings yet
- Investigación LGR GARGALLO RAMÍREZ FRANCISCO JAVIER PDFDocument18 pagesInvestigación LGR GARGALLO RAMÍREZ FRANCISCO JAVIER PDFFrancisco Javier GargalloNo ratings yet
- Laboratorio - Diseño de ControladoresDocument15 pagesLaboratorio - Diseño de ControladoresJavier PerezNo ratings yet
- PID TwidoDocument14 pagesPID TwidoFrancisco Luna MoraNo ratings yet
- Entra Final ControlDocument15 pagesEntra Final ControlMerlysKaterinePadillaOchoaNo ratings yet
- Rediseño - de Una Planta Procesadora de QuinuaDocument93 pagesRediseño - de Una Planta Procesadora de QuinuaDaniel Barrenechea ChirinosNo ratings yet
- Módulos Embebidos DSPDocument16 pagesMódulos Embebidos DSPChristian AgNo ratings yet
- Sistema de Control Predictivo y CascadaDocument32 pagesSistema de Control Predictivo y CascadaGeraldine Burgos GonzalesNo ratings yet
- Teoria Control Temperatura - ANTECHDocument73 pagesTeoria Control Temperatura - ANTECHOG100% (1)
- Seguridad y Control en Sistemas de Combustión - PremacDocument39 pagesSeguridad y Control en Sistemas de Combustión - Premacsergio leon gomezNo ratings yet
- Conexión N1200-RS485Document2 pagesConexión N1200-RS485EwdinNo ratings yet
- Manual Gobernador de VelocidadDocument195 pagesManual Gobernador de VelocidadVictor Carhuaricra Segura100% (1)
- Unidad1.Fundamentos de Programación Industrial. Diapositivas PDFDocument33 pagesUnidad1.Fundamentos de Programación Industrial. Diapositivas PDFJorge Carrascal GarcíaNo ratings yet
- Tesis AutomatizacionDocument116 pagesTesis AutomatizacionJohn Taylor100% (1)
- Problema 2 - Tarea 3Document10 pagesProblema 2 - Tarea 3Luis David Corona LopezNo ratings yet
- PLCDocument15 pagesPLCBruno BriccolaNo ratings yet
- Algoritmos de ControlDocument50 pagesAlgoritmos de ControlStebhan Sanchez100% (1)
- Sintonía Manual y AdaptivaDocument32 pagesSintonía Manual y AdaptivaMarcelo GomezNo ratings yet
- Compensadores TiposDocument11 pagesCompensadores TiposAlain VegganburyNo ratings yet
- MP Practica 04 P2 MSP-1Document10 pagesMP Practica 04 P2 MSP-1Sam VslNo ratings yet
- Control Proporcional IntegralDocument31 pagesControl Proporcional IntegralFernando Ramírez100% (1)
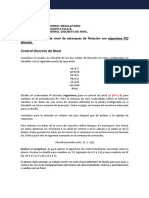
- Proyecto 02 Control RegulatorioDocument2 pagesProyecto 02 Control RegulatorioAuberNo ratings yet
- Parcial Final Diego PrietoDocument8 pagesParcial Final Diego PrietoDiegoLmtPrietoNo ratings yet