You might also like
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- Manual WaveletDocument626 pagesManual Waveletjulio gamboaNo ratings yet
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- Data Conditioning and ReprocessingDocument13 pagesData Conditioning and ReprocessingWindy D ANo ratings yet
- Introduction To Obspy LionDocument54 pagesIntroduction To Obspy LionBenja LedesmaNo ratings yet
- How to Design Optimization Algorithms by Applying Natural Behavioral PatternsFrom EverandHow to Design Optimization Algorithms by Applying Natural Behavioral PatternsNo ratings yet
- Electronics Workshop, Department of Earth Science, University of Bergen - Main - SuCourseSpring07Document77 pagesElectronics Workshop, Department of Earth Science, University of Bergen - Main - SuCourseSpring07Wisnu Slamet PriyantoNo ratings yet
- Applications of Variational Inequalities in Stochastic ControlFrom EverandApplications of Variational Inequalities in Stochastic ControlRating: 2 out of 5 stars2/5 (1)
- MSC Petroleum Geoscience SMTDocument43 pagesMSC Petroleum Geoscience SMTSean YiyangNo ratings yet
- Seistomopy: Fast Visualization, Comparison, and Calculations in Global Tomographic ModelsDocument11 pagesSeistomopy: Fast Visualization, Comparison, and Calculations in Global Tomographic ModelsAdexa PutraNo ratings yet
- 04 Segy FormatDocument7 pages04 Segy FormatPhạm NamNo ratings yet
- Erth3021 Seismic Refraction PracDocument3 pagesErth3021 Seismic Refraction PracDhaffer Al-MezhanyNo ratings yet
- Wavelet TransformsDocument16 pagesWavelet Transformsdivs724100% (1)
- Wiener Filter 1Document11 pagesWiener Filter 1Vanidevi ManiNo ratings yet
- Python Programing Language in GeoScience-NotesDocument22 pagesPython Programing Language in GeoScience-NotesMahmoud M. Badawy100% (1)
- Palmer.03.Digital Processing of Shallow Seismic Refraction Data PDFDocument23 pagesPalmer.03.Digital Processing of Shallow Seismic Refraction Data PDFAirNo ratings yet
- 02 Acquisition Processing Basics 02Document56 pages02 Acquisition Processing Basics 02HarshNo ratings yet
- Blog - Seismic Processing Guides & TutorialsDocument5 pagesBlog - Seismic Processing Guides & Tutorialsmalliwi88No ratings yet
- A SEG-Y File Toolbox For MatlabDocument14 pagesA SEG-Y File Toolbox For MatlabFerrando NañezNo ratings yet
- JoomlaDocument7 pagesJoomlamythygpbhuNo ratings yet
- Deep Learning Applied To Seismic Facies Characterization SEG WKSHP PDFDocument3 pagesDeep Learning Applied To Seismic Facies Characterization SEG WKSHP PDFkusbarotoNo ratings yet
- ProMAX Tutorial FaisalDocument6 pagesProMAX Tutorial FaisaleffaminNo ratings yet
- Programming With SCILABDocument14 pagesProgramming With SCILABSabha NayaghamNo ratings yet
- What Defines A Reflection: Refraction (First Arrival)Document17 pagesWhat Defines A Reflection: Refraction (First Arrival)usjpphysicsNo ratings yet
- The Bonch-Bruevich St.-Petersburg State University of TelecommunicationsDocument12 pagesThe Bonch-Bruevich St.-Petersburg State University of TelecommunicationsMuhiziStanNo ratings yet
- Dix - 55 - Seismic Velocities From Surface MeasurementsDocument15 pagesDix - 55 - Seismic Velocities From Surface MeasurementsHoidi Shitakwa Zacharia100% (2)
- Facies Classification-ML PDFDocument4 pagesFacies Classification-ML PDFkmilo04No ratings yet
- Geothermal Heat Pump: User ManualDocument16 pagesGeothermal Heat Pump: User ManualEgorNo ratings yet
- Digital Filter DesignDocument102 pagesDigital Filter Designjaun danielNo ratings yet
- Lab 02 - Seismic Data QCDocument6 pagesLab 02 - Seismic Data QCapi-323770220No ratings yet
- Seismic RefractionDocument74 pagesSeismic RefractionAdrian Liviu BugeaNo ratings yet
- SU WokshopDocument63 pagesSU WokshopWeining LiuNo ratings yet
- Release NotesDocument152 pagesRelease Notestesttest3846No ratings yet
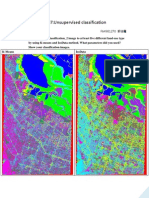
- Unsupervised LearningDocument29 pagesUnsupervised LearningUddalak BanerjeeNo ratings yet
- Field QC With VISTA (Houston)Document9 pagesField QC With VISTA (Houston)LiliNo ratings yet
- Sampling Theory: Double Sampling (Two Phase Sampling)Document12 pagesSampling Theory: Double Sampling (Two Phase Sampling)andriyesNo ratings yet
- Application Student 2018Document1 pageApplication Student 2018GisheilaNo ratings yet
- Lab 03 - Seismic Noise AttenuationDocument5 pagesLab 03 - Seismic Noise Attenuationapi-323770220No ratings yet
- Chapter 4 Discrete Fourier TransformDocument65 pagesChapter 4 Discrete Fourier TransformMuhd HafizuddinNo ratings yet
- Imaging Passive Seismic DataDocument11 pagesImaging Passive Seismic DataJaenudin ZenNo ratings yet
- Promax Installation ProcedureDocument6 pagesPromax Installation ProcedureWisnu Slamet PriyantoNo ratings yet
- Shallow Seismic Refraction InterpretationDocument33 pagesShallow Seismic Refraction InterpretationYong PrazNo ratings yet
- Volve Seismic ST10010 Report - 1545785889Document108 pagesVolve Seismic ST10010 Report - 1545785889kamNo ratings yet
- AbstractDocument3 pagesAbstractsreeramyadingariNo ratings yet
- Pertrophysics-00List of Abbreviations PDFDocument6 pagesPertrophysics-00List of Abbreviations PDFOlaoluwa OlatonaNo ratings yet
- Lab 7Document4 pagesLab 7郭佳靇No ratings yet
- Random Noise Reduction FXYDocument3 pagesRandom Noise Reduction FXYAwalNo ratings yet
- Chapter 5 - Processing of Seismic Reflection Data 1 01Document70 pagesChapter 5 - Processing of Seismic Reflection Data 1 01Ricky ChiuNo ratings yet
- Basic ProcessingDocument86 pagesBasic ProcessingRazi AbbasNo ratings yet
- Airgun ArraysDocument21 pagesAirgun ArraysGianni PavanNo ratings yet
- A Review On The Prospect of Geothermal Energy in BangladeshDocument8 pagesA Review On The Prospect of Geothermal Energy in BangladeshInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 2019 Geoteric Overview Brochure PDFDocument9 pages2019 Geoteric Overview Brochure PDFolaseyeNo ratings yet
- A Literature Survey On Applications of Image Processing For Video SurveillanceDocument3 pagesA Literature Survey On Applications of Image Processing For Video SurveillanceInternational Journal of Innovative Science and Research Technology0% (1)
- Metode Seismik Bias: Refraction SeismicDocument30 pagesMetode Seismik Bias: Refraction SeismicDimas PermanaNo ratings yet
- Seismic Imaging Toolbox For PythonDocument16 pagesSeismic Imaging Toolbox For PythonSupriyo ChakrabortyNo ratings yet
- Lankston Refraction TR102Document55 pagesLankston Refraction TR102Harold G. Velasquez SanchezNo ratings yet
- Applications of Neuro Fuzzy Systems: A Brief Review and Future OutlineDocument17 pagesApplications of Neuro Fuzzy Systems: A Brief Review and Future OutlineMutiaraning PertiwiNo ratings yet
- Introduction To Marine Seismic Processing - ProMAXDocument51 pagesIntroduction To Marine Seismic Processing - ProMAXKevin Wamuo0% (1)
- Cross CorrelationTheoryDocument6 pagesCross CorrelationTheoryanima1982No ratings yet
- Plug in DevelopmentDocument46 pagesPlug in DevelopmentJean claude onanaNo ratings yet
- Dsa CheatsheetDocument28 pagesDsa CheatsheetRAJAN DUTTANo ratings yet
- Control System II - Lecture NotesDocument78 pagesControl System II - Lecture Notes34plt34No ratings yet
- Shunt Capacitor Bank Applications Protection FundamentalsDocument32 pagesShunt Capacitor Bank Applications Protection Fundamentalsganesamoorthy1987No ratings yet
- 00 IntroductionDocument4 pages00 Introductionv_doina20023873No ratings yet
- Auditing Database Auditing Database System System: Chapter 4-HallDocument35 pagesAuditing Database Auditing Database System System: Chapter 4-HallElyssaNo ratings yet
- Table of LFSRDocument6 pagesTable of LFSRMayur AnvekarNo ratings yet
- WI - RRC CS Failure RateDocument3 pagesWI - RRC CS Failure Ratefidele50% (2)
- Python Function Question and Answers PDFDocument25 pagesPython Function Question and Answers PDFRAJESHNo ratings yet
- 03.10.12. Final Syllabus (M.SC Math)Document24 pages03.10.12. Final Syllabus (M.SC Math)Devil tigerNo ratings yet
- The Ultimate C - C - TS4CO - 1909 - SAP Certified Application Associate - SAP S/4HANA For Management Accounting Associates (SAP S/4HANA 1909)Document2 pagesThe Ultimate C - C - TS4CO - 1909 - SAP Certified Application Associate - SAP S/4HANA For Management Accounting Associates (SAP S/4HANA 1909)KirstingNo ratings yet
- SPARC T5-Based Servers Implementation-Installation Online AssessmentDocument20 pagesSPARC T5-Based Servers Implementation-Installation Online Assessmentjucamisternet100% (1)
- THEORY For Wein Bridge Oscillator Using Ic 741 Op AmpDocument1 pageTHEORY For Wein Bridge Oscillator Using Ic 741 Op AmpPurnima Sri Sai100% (1)
- COM465xP D00216 M XXENDocument108 pagesCOM465xP D00216 M XXENKevin TeodorovNo ratings yet
- Micro Manual LISPDocument2 pagesMicro Manual LISPLeopoldo Mauro100% (1)
- Verification Automation Using IPXACT - Jindal and SinglaDocument31 pagesVerification Automation Using IPXACT - Jindal and SinglaLuis B. Da SilvaNo ratings yet
- Disk MagicDocument4 pagesDisk MagicMuhammad Javed SajidNo ratings yet
- Dashboards Help FileDocument127 pagesDashboards Help FilerameshvarkutiNo ratings yet
- S+ I/O: HAI805 & HAO805 HART I/O: Symphony PlusDocument4 pagesS+ I/O: HAI805 & HAO805 HART I/O: Symphony PlusMD. AL MUZAHIDNo ratings yet
- Lock RekeyingDocument17 pagesLock RekeyingPrathusha RNo ratings yet
- Allen Kyle ResumeDocument2 pagesAllen Kyle ResumeJB July SantanderNo ratings yet
- Ecss Q ST 30 11c Rev1 (4october2011) PDFDocument71 pagesEcss Q ST 30 11c Rev1 (4october2011) PDFjsadachiNo ratings yet
- Secospace USG2110 V100R001C03SPC200 User Guide (English Document)Document10 pagesSecospace USG2110 V100R001C03SPC200 User Guide (English Document)Subarna GhimireNo ratings yet
- ReadmeDocument60 pagesReadmetimur_okNo ratings yet
- B.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFDocument15 pagesB.Tech (PT) - Mathematics - II YEAR - III SEM - (R) 2012 PDFmohamed irshadNo ratings yet
- Handshake51 GettingStarted PDFDocument31 pagesHandshake51 GettingStarted PDFspotNo ratings yet
- Alogorithm and DS PG DAC - Aug 19Document34 pagesAlogorithm and DS PG DAC - Aug 19ravi malegaveNo ratings yet
- Chapter10 Econometrics DummyVariableModelDocument8 pagesChapter10 Econometrics DummyVariableModelAbdullah KhatibNo ratings yet
- A Novel Security Framework Using Trust and Fuzzy Logic in ManetDocument15 pagesA Novel Security Framework Using Trust and Fuzzy Logic in ManetijdpsNo ratings yet
- O Ring Vacuum SealingDocument15 pagesO Ring Vacuum SealingManoj SundararajanNo ratings yet