You might also like
- My Lecture 2Document14 pagesMy Lecture 2Kashif KhanNo ratings yet
- Module 5 Notes - COADocument6 pagesModule 5 Notes - COAAashu PrasadNo ratings yet
- Unit 15 Bus StructureDocument32 pagesUnit 15 Bus StructureRennie KawanguNo ratings yet
- Interfacing Processors and Peripherals: CS151B/EE M116C Computer Systems ArchitectureDocument31 pagesInterfacing Processors and Peripherals: CS151B/EE M116C Computer Systems ArchitecturetinhtrilacNo ratings yet
- Bus StructureDocument4 pagesBus StructureAbdul R3hmanNo ratings yet
- Topics To Be Covered - Interconnection Structures Bus Interconnection Multiple-Bus Hierarchies - Peripheral Component Interconnect (PCI)Document22 pagesTopics To Be Covered - Interconnection Structures Bus Interconnection Multiple-Bus Hierarchies - Peripheral Component Interconnect (PCI)AmanuelNo ratings yet
- System Bus in Computer Architecture: Goran Wnis Hama AliDocument34 pagesSystem Bus in Computer Architecture: Goran Wnis Hama AliGoran WnisNo ratings yet
- Interconnection Structures: Collection of Paths Connecting Various Modules Is Called As Interconnection StructureDocument22 pagesInterconnection Structures: Collection of Paths Connecting Various Modules Is Called As Interconnection Structuredomainname9No ratings yet
- The Collection of Paths Connecting The Various Modules of A Computer (CPU, Memory, I/O) Is Called The Interconnection StructureDocument3 pagesThe Collection of Paths Connecting The Various Modules of A Computer (CPU, Memory, I/O) Is Called The Interconnection StructureD KabipranavNo ratings yet
- Lecture 3 On Chapter 3 A Top-Level View of Computer Function and Interconnection by Sameer AkramDocument37 pagesLecture 3 On Chapter 3 A Top-Level View of Computer Function and Interconnection by Sameer AkramUs ManNo ratings yet
- Computer Buses: What Is A Bus?Document14 pagesComputer Buses: What Is A Bus?masumiNo ratings yet
- Computer Architeture Bus StructureDocument33 pagesComputer Architeture Bus StructureJbr RaheemNo ratings yet
- Interfacing and CommunicationDocument50 pagesInterfacing and CommunicationVarun HuleNo ratings yet
- 3-Interconnection of Components - Overview of IAS Computer Function-06-01-2024Document12 pages3-Interconnection of Components - Overview of IAS Computer Function-06-01-2024vanchagargNo ratings yet
- 2 - A Top-Level View of Computer Function and InterconnectionDocument39 pages2 - A Top-Level View of Computer Function and InterconnectionAliaa TarekNo ratings yet
- Name: Akhil Boby Class: S4 CSE Roll No: 7: Bus StructureDocument12 pagesName: Akhil Boby Class: S4 CSE Roll No: 7: Bus StructureAkhil BobyNo ratings yet
- Unit 1Document22 pagesUnit 1bhaivarun65No ratings yet
- Ch02 - System InterconnectionDocument29 pagesCh02 - System InterconnectionViet Quang VoNo ratings yet
- Buses and InterfacesDocument35 pagesBuses and InterfacessalithakkNo ratings yet
- TRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam Academy PDFDocument15 pagesTRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam Academy PDFJegaNo ratings yet
- TRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam AcademyDocument15 pagesTRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam AcademyJega67% (3)
- CPU Architecture: Control Unit (CU)Document10 pagesCPU Architecture: Control Unit (CU)i study100% (1)
- CHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationDocument17 pagesCHAPTER 6. Buses & Interfacing: Ec303 - Computer Architecture & OrganizationPrevenaManiamNo ratings yet
- 01 BusesDocument38 pages01 Busesshriram1082883No ratings yet
- Lecture 2 (COA)Document16 pagesLecture 2 (COA)CSE-41-Rituparna MeherNo ratings yet
- Bus StructureDocument160 pagesBus StructureRohit SaxenaNo ratings yet
- Kalinga University Department of Computer ScienceDocument13 pagesKalinga University Department of Computer SciencePooja Singh ThakurNo ratings yet
- "Bus Interface-I" in (Microprocessor and Assembly Language)Document19 pages"Bus Interface-I" in (Microprocessor and Assembly Language)MUHAMMAD ABDULLAHNo ratings yet
- Buses /interconnection Structures: Dr. Syafiq Fauzi Bin KamarulzamanDocument42 pagesBuses /interconnection Structures: Dr. Syafiq Fauzi Bin KamarulzamanJolyn GanNo ratings yet
- ACFrOgBUHfSs5JJq8qhMAidgxGlhI1PVhDENxJ5Nvvf40LLrXAfXbAyXJvb16wu0NpVGnPnIEmvas8EAzCMG6hBW3FrQm4u33xPLThfDWODff8 jHUC-N9Jgo3XEpPc PDFDocument76 pagesACFrOgBUHfSs5JJq8qhMAidgxGlhI1PVhDENxJ5Nvvf40LLrXAfXbAyXJvb16wu0NpVGnPnIEmvas8EAzCMG6hBW3FrQm4u33xPLThfDWODff8 jHUC-N9Jgo3XEpPc PDFshifa khanNo ratings yet
- Coa Mod 1Document77 pagesCoa Mod 1thomsondevassykuttyNo ratings yet
- Archtecture of CPUDocument8 pagesArchtecture of CPUsathishinvincibleNo ratings yet
- William Stallings Computer Organization and Architecture 7 Edition System BusesDocument50 pagesWilliam Stallings Computer Organization and Architecture 7 Edition System BusesRubeshan ShanNo ratings yet
- Computer Organization and ArchitectureDocument25 pagesComputer Organization and ArchitectureNeel RavalNo ratings yet
- Bus StructureDocument160 pagesBus Structurexperiac100% (2)
- Bus InterconnectionDocument11 pagesBus InterconnectionGame ZoneNo ratings yet
- Top Level View of Computer Function and InterconnectionDocument62 pagesTop Level View of Computer Function and InterconnectionAhsan JameelNo ratings yet
- Unit - IV: Input - OutputDocument50 pagesUnit - IV: Input - Outputkarvind08No ratings yet
- Computer Organization and ArchitectureDocument12 pagesComputer Organization and ArchitectureWINORLOSENo ratings yet
- Subnetting: Network ID Subnet ID Host IDDocument22 pagesSubnetting: Network ID Subnet ID Host IDmbaakanyiNo ratings yet
- Coa Unit 1Document28 pagesCoa Unit 1vivek kumarNo ratings yet
- VonNeumann ArchitectureDocument5 pagesVonNeumann ArchitectureBittu VermaNo ratings yet
- BUS InterconnectionDocument27 pagesBUS InterconnectionDEEPIKA PAVUNDOSS 20BEC0285No ratings yet
- Lecture 1.1.5 (System Bus Structure-Data, Address and Control Bus)Document4 pagesLecture 1.1.5 (System Bus Structure-Data, Address and Control Bus)adityaNo ratings yet
- System Busses (Assignment) 22Document19 pagesSystem Busses (Assignment) 22saira_hussainNo ratings yet
- Input Output OrganizationDocument19 pagesInput Output OrganizationAayush FadiaNo ratings yet
- Bus StructureDocument43 pagesBus StructureManish JangidNo ratings yet
- Sytem BusDocument24 pagesSytem BusRam RamNo ratings yet
- Computer Organization and ArchitectureDocument31 pagesComputer Organization and Architecture-AkhilGannamrajuNo ratings yet
- BusesDocument19 pagesBusesprasath67No ratings yet
- Homework: - Reading - Machine Projects - LabsDocument21 pagesHomework: - Reading - Machine Projects - Labsloveygupta007No ratings yet
- Buses and Bus Architecture-2Document19 pagesBuses and Bus Architecture-2Dinesh KumarNo ratings yet
- 2076 Ashwin: Question-Set SolutionDocument24 pages2076 Ashwin: Question-Set SolutionSaurav NeupaneNo ratings yet
- Chap 3 Computer Function InterconnectionDocument30 pagesChap 3 Computer Function InterconnectionNguyễn Thanh LiêmNo ratings yet
- Week 7 (Input Output Organisation) (MFRDT)Document29 pagesWeek 7 (Input Output Organisation) (MFRDT)Mohamed Abdirashid AhmedNo ratings yet
- 03 - Top Level View of Computer Function and InterconnectionDocument64 pages03 - Top Level View of Computer Function and Interconnectionbree789No ratings yet
- Bus InterconnectionDocument31 pagesBus InterconnectionAnonymous A72zb61100% (1)
- Unit 3: Bus Structure, Memory and I/O InterfacingDocument1 pageUnit 3: Bus Structure, Memory and I/O Interfacingyogesh deoNo ratings yet
- A Computer Consists of A Set of Components or Modules of Three Basic Types That Communicate With Each OtherDocument2 pagesA Computer Consists of A Set of Components or Modules of Three Basic Types That Communicate With Each OtherDawood lifeNo ratings yet
- Predator U7135 ManualDocument36 pagesPredator U7135 Manualr17g100% (1)
- Introduction To BiogasDocument5 pagesIntroduction To BiogasLouis EldertardNo ratings yet
- Introduction To DifferentiationDocument10 pagesIntroduction To DifferentiationaurennosNo ratings yet
- WHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)Document3 pagesWHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)114912No ratings yet
- Cyclic MeditationDocument8 pagesCyclic MeditationSatadal GuptaNo ratings yet
- ResumeDocument3 pagesResumeapi-280300136No ratings yet
- Santu BabaDocument2 pagesSantu Babaamveryhot0950% (2)
- Blockchains: Architecture, Design and Use CasesDocument26 pagesBlockchains: Architecture, Design and Use Caseseira kNo ratings yet
- Measuring Temperature - Platinum Resistance ThermometersDocument3 pagesMeasuring Temperature - Platinum Resistance Thermometersdark*nightNo ratings yet
- Beyond "The Arc of Freedom and Prosperity": Debating Universal Values in Japanese Grand StrategyDocument9 pagesBeyond "The Arc of Freedom and Prosperity": Debating Universal Values in Japanese Grand StrategyGerman Marshall Fund of the United StatesNo ratings yet
- Syllabus PDFDocument3 pagesSyllabus PDFBibin Raj B SNo ratings yet
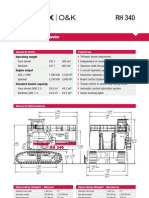
- Hydraulic Mining ExcavatorDocument8 pagesHydraulic Mining Excavatorasditia_07100% (1)
- Grade 9 Science Biology 1 DLPDocument13 pagesGrade 9 Science Biology 1 DLPManongdo AllanNo ratings yet
- The Privatization PolicyDocument14 pagesThe Privatization PolicyRIBLEN EDORINANo ratings yet
- Aliping PDFDocument54 pagesAliping PDFDirect LukeNo ratings yet
- Question Answers of Chapter 13 Class 5Document6 pagesQuestion Answers of Chapter 13 Class 5SuvashreePradhanNo ratings yet
- BMGT 200 Assignment 2 Answer KeysDocument3 pagesBMGT 200 Assignment 2 Answer Keysharout keshishianNo ratings yet
- Implications of A Distributed Environment Part 2Document38 pagesImplications of A Distributed Environment Part 2Joel wakhunguNo ratings yet
- Pipe Cleaner Lesson PlanDocument2 pagesPipe Cleaner Lesson PlanTaylor FranklinNo ratings yet
- I I I I: Peroxid.Q!Document2 pagesI I I I: Peroxid.Q!Diego PradelNo ratings yet
- BLP#1 - Assessment of Community Initiative (3 Files Merged)Document10 pagesBLP#1 - Assessment of Community Initiative (3 Files Merged)John Gladhimer CanlasNo ratings yet
- Research 093502Document8 pagesResearch 093502Chrlszjhon Sales SuguitanNo ratings yet
- DFo 2 1Document15 pagesDFo 2 1Donna HernandezNo ratings yet
- BackgroundsDocument13 pagesBackgroundsRaMinah100% (8)
- Advertising II Marathi VersionDocument91 pagesAdvertising II Marathi VersionHarsh Sangani100% (1)
- CSE 202.04 Inspection of Concrete StructuresDocument67 pagesCSE 202.04 Inspection of Concrete StructuresJellyn BaseNo ratings yet
- Semi Detailed Lesson PlanDocument2 pagesSemi Detailed Lesson PlanJean-jean Dela Cruz CamatNo ratings yet
- Phylogeny Practice ProblemsDocument3 pagesPhylogeny Practice ProblemsSusan Johnson100% (1)
- HFE0106 TraskPart2Document5 pagesHFE0106 TraskPart2arunkr1No ratings yet
- ADC of PIC MicrocontrollerDocument4 pagesADC of PIC Microcontrollerkillbill100% (2)