You might also like
- Finite Element Analysis - 2 Marks - All 5 UnitsDocument13 pagesFinite Element Analysis - 2 Marks - All 5 UnitsMohan Prasad.M77% (30)
- Review of Mathematical Models for Mixing Simulations in VisiMixDocument37 pagesReview of Mathematical Models for Mixing Simulations in VisiMixgrincheu70No ratings yet
- 48 - Reservoir SimulationDocument20 pages48 - Reservoir Simulationrizal tri susilo100% (2)
- SN DiagramDocument7 pagesSN DiagramManas Kotru100% (1)
- Pneumatic Reciprocating Hacksaw Machine: March 2016Document6 pagesPneumatic Reciprocating Hacksaw Machine: March 2016SaurabhNo ratings yet
- Convection Heat Transfer and Flow Calculations Suitable For Electric Machines Thermal ModelsDocument8 pagesConvection Heat Transfer and Flow Calculations Suitable For Electric Machines Thermal ModelsmassomieNo ratings yet
- Mechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsFrom EverandMechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsNo ratings yet
- Renewable Energy SourcesDocument27 pagesRenewable Energy SourcesgkarthikeyanNo ratings yet
- 2018 Book CFDTechniquesAndThermo-MechaniDocument208 pages2018 Book CFDTechniquesAndThermo-MechaniPablo GómezNo ratings yet
- CrackingDocument33 pagesCrackingEman El DsoukyNo ratings yet
- Computational Fluid Dynamics Technology For Hypersonic ApplicationsDocument12 pagesComputational Fluid Dynamics Technology For Hypersonic ApplicationsSãröj ShâhNo ratings yet
- Super Computing Applications in Internal Combustion Engine Design andDocument8 pagesSuper Computing Applications in Internal Combustion Engine Design andMadhusudan BarotNo ratings yet
- Project - OmanDocument15 pagesProject - OmanIsra tanveerNo ratings yet
- Application of deep artificial neural networks to replace flamelet library lookup tablesDocument18 pagesApplication of deep artificial neural networks to replace flamelet library lookup tablesMoatasim FarooqueNo ratings yet
- TR CFD 08 36 PDFDocument60 pagesTR CFD 08 36 PDFManu ChakkingalNo ratings yet
- 20 OPTIMIZATIONOnDocument9 pages20 OPTIMIZATIONOnDavid AlejandroNo ratings yet
- IC Engine Details 1-S2.0-S0360544208002430-MainDocument9 pagesIC Engine Details 1-S2.0-S0360544208002430-MainAmeen KhanNo ratings yet
- Cmla2010 13Document16 pagesCmla2010 13Srijan GuptaNo ratings yet
- Dimensioning and Evaluating A Multi-Channel Thermoelectric Generator Using A Costumized Simulation ArchitectureDocument19 pagesDimensioning and Evaluating A Multi-Channel Thermoelectric Generator Using A Costumized Simulation ArchitectureBenny Wahyudi 1707110943No ratings yet
- In-Cylinder CFD Simulation Using A C++ Object Oriented Toolkit SAE2004Document11 pagesIn-Cylinder CFD Simulation Using A C++ Object Oriented Toolkit SAE2004AghajaniNo ratings yet
- Burning Surfaces Evolution in Solid Propellants: A Numerical ModelDocument14 pagesBurning Surfaces Evolution in Solid Propellants: A Numerical ModelnguyenhNo ratings yet
- Numerical Analysisof Thermochemical Nonequilibrium Flowsina Model Scramjet EngineDocument18 pagesNumerical Analysisof Thermochemical Nonequilibrium Flowsina Model Scramjet EnginePrince RajNo ratings yet
- Multi Field Coupling Dynamic Modeling and Simula 2014 Simulation Modelling PDocument24 pagesMulti Field Coupling Dynamic Modeling and Simula 2014 Simulation Modelling P刘文No ratings yet
- MODELING EGS FLOW AND TRANSPORTDocument8 pagesMODELING EGS FLOW AND TRANSPORTLuca GuglielmettiNo ratings yet
- Model order reduction applied to heat conduction in photovoltaic modulesDocument10 pagesModel order reduction applied to heat conduction in photovoltaic moduleslekan4No ratings yet
- Optimización Multi-Objetivo - Lubricante y Transf CalorDocument13 pagesOptimización Multi-Objetivo - Lubricante y Transf CalorBruce RamregNo ratings yet
- Applsci 12 10193Document16 pagesApplsci 12 10193davideNo ratings yet
- Plugin-11745 Egedy PaperDocument5 pagesPlugin-11745 Egedy PaperMuhammad ImranNo ratings yet
- Fluent Workshop Lecture NotesDocument206 pagesFluent Workshop Lecture NoteszubbbuNo ratings yet
- Fluid Mixing Lab ReportDocument20 pagesFluid Mixing Lab ReportbasharalhawarnaNo ratings yet
- Modeling VVER Reactor Pressure Vessel CFDDocument9 pagesModeling VVER Reactor Pressure Vessel CFDlovehurt1386No ratings yet
- CFD Analysis of Optimal Hardware CoolingDocument10 pagesCFD Analysis of Optimal Hardware CoolingAmjadRiazNo ratings yet
- ArpivaDocument8 pagesArpivavahrmNo ratings yet
- Dahmani PortugalDocument11 pagesDahmani PortugalhiimrujuNo ratings yet
- Application of Advanced CDF To Chemical Plant DesignDocument12 pagesApplication of Advanced CDF To Chemical Plant DesignGaurav GuptaNo ratings yet
- EnergyDocument9 pagesEnergyrezarossNo ratings yet
- Dynamic Modeling For Vapor Compression Systems Part II Simulation Tutorial - ImportanteDocument19 pagesDynamic Modeling For Vapor Compression Systems Part II Simulation Tutorial - ImportanteFrancisco OppsNo ratings yet
- Numerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerDocument23 pagesNumerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerBahadır HarmancıNo ratings yet
- Lightcraft PropulsionDocument37 pagesLightcraft PropulsionLin CornelisonNo ratings yet
- Sae 2001-01-1235Document17 pagesSae 2001-01-1235Efthimios PariotisNo ratings yet
- Paper Steady - State - CFD - Analysis - of - Heat - Transfer - CoefficDocument6 pagesPaper Steady - State - CFD - Analysis - of - Heat - Transfer - CoefficLuis Alonso Dipaz ZeaNo ratings yet
- A Thermal Network Model For Induction Motors of Hermetic Reciprocating CompressorsDocument11 pagesA Thermal Network Model For Induction Motors of Hermetic Reciprocating CompressorsAlper EmekNo ratings yet
- Introduction To Heat Transfer ModuleDocument36 pagesIntroduction To Heat Transfer Modulerfah1980No ratings yet
- CFD Theory and Models ChapterDocument12 pagesCFD Theory and Models ChapterGabriel NogueiraNo ratings yet
- Watson 2015Document14 pagesWatson 2015Maria Luisa Sandoval OchoaNo ratings yet
- Generic Gas Turbine Combustor: Description of The CombustorDocument7 pagesGeneric Gas Turbine Combustor: Description of The CombustorStanley BoswellNo ratings yet
- Simulation of Diesel Spray in A ConstantDocument5 pagesSimulation of Diesel Spray in A ConstantAkshay VaidhyNo ratings yet
- Computational Battery Dynamics (CBD) - Electrochemical/thermal Coupled Modeling and Multi-Scale ModelingDocument13 pagesComputational Battery Dynamics (CBD) - Electrochemical/thermal Coupled Modeling and Multi-Scale ModelingAlhussein Mohammed Abd ElhafeezNo ratings yet
- Design of Thermal Systems: Mr. S. V. Yadav Department of Mechanical EngineeringDocument52 pagesDesign of Thermal Systems: Mr. S. V. Yadav Department of Mechanical EngineeringVishal BholeNo ratings yet
- S e N S o R S & T R A N S D U C e R SDocument6 pagesS e N S o R S & T R A N S D U C e R SPCezzzNo ratings yet
- 3D Simulations of Diesel Sprays Using n-Dodecane as a SurrogateDocument14 pages3D Simulations of Diesel Sprays Using n-Dodecane as a SurrogategopalbarathiNo ratings yet
- Unsteady_and_Axisymmetric_Simulation_of (2)Document6 pagesUnsteady_and_Axisymmetric_Simulation_of (2)MihirduttaNo ratings yet
- Turbine Gas-Path Heat Transfer: Wright-Patterson Air Force Base, Ohio, U.S.ADocument36 pagesTurbine Gas-Path Heat Transfer: Wright-Patterson Air Force Base, Ohio, U.S.AHenriqueNo ratings yet
- Biogas Burner Combustion CFDDocument6 pagesBiogas Burner Combustion CFDBensinghdhas Sathiya DhasNo ratings yet
- Numerical Simulation of Single Phase Flow With Eulerian ModelDocument3 pagesNumerical Simulation of Single Phase Flow With Eulerian ModelBeatriz BarbozaNo ratings yet
- Procedure For Developing Dynamic Modulus Master Curves For Pavement Structural DesignDocument10 pagesProcedure For Developing Dynamic Modulus Master Curves For Pavement Structural Designzhizhang5591No ratings yet
- CFD SIMULATIONS FOR BOILER ANALYSISDocument6 pagesCFD SIMULATIONS FOR BOILER ANALYSISakinkanalangNo ratings yet
- Introduction to Heat Transfer ModuleDocument38 pagesIntroduction to Heat Transfer ModuleHafiezul HassanNo ratings yet
- CFD AnalysisDocument8 pagesCFD AnalysisGuitar SoundNo ratings yet
- Chemical Engineering & Processing: Process Intensi Fication: Mohamed I. Hassan, Yassir T. MakkawiDocument14 pagesChemical Engineering & Processing: Process Intensi Fication: Mohamed I. Hassan, Yassir T. MakkawiRoger David Melendez GuevaraNo ratings yet
- Conjugate Heat Transfer PDFDocument10 pagesConjugate Heat Transfer PDFbenabedmNo ratings yet
- Hydrothermal Analysis in Engineering Using Control Volume Finite Element MethodFrom EverandHydrothermal Analysis in Engineering Using Control Volume Finite Element MethodNo ratings yet
- "Anyone Who Can Contemplate Quantum Mechanics Without Getting Dizzy Hasn't Understood It." - Niels BohrDocument31 pages"Anyone Who Can Contemplate Quantum Mechanics Without Getting Dizzy Hasn't Understood It." - Niels BohrgkarthikeyanNo ratings yet
- Atomic ModelsDocument34 pagesAtomic Modelsmuli aniNo ratings yet
- New Theory of RelativityDocument20 pagesNew Theory of RelativitygkarthikeyanNo ratings yet
- Michelson and MorleyDocument7 pagesMichelson and MorleygkarthikeyanNo ratings yet
- Conversion Gate01Document44 pagesConversion Gate01gkarthikeyanNo ratings yet
- ME 6503 DME 2 Marks With AnswerDocument15 pagesME 6503 DME 2 Marks With AnswerheartyseeNo ratings yet
- Ohm's Law: The Fundamental Relationship in Electric CircuitsDocument11 pagesOhm's Law: The Fundamental Relationship in Electric CircuitsgkarthikeyanNo ratings yet
- Logic GatesDocument24 pagesLogic GatesgkarthikeyanNo ratings yet
- Rent AgreementDocument4 pagesRent AgreementgkarthikeyanNo ratings yet
- MtapDocument1 pageMtapraymart zalunNo ratings yet
- Department of Mechanical Engineering BM 7103 Fuels and Combustion Question BankDocument7 pagesDepartment of Mechanical Engineering BM 7103 Fuels and Combustion Question BankgkarthikeyanNo ratings yet
- Hedu e 20 2020 PDFDocument35 pagesHedu e 20 2020 PDFgkarthikeyanNo ratings yet
- Calendar of Events 19 20Document2 pagesCalendar of Events 19 20MUTHUKUMARNo ratings yet
- Design and Fabrication of Go Kart Electric Vehicle Ijariie9739Document3 pagesDesign and Fabrication of Go Kart Electric Vehicle Ijariie9739gkarthikeyanNo ratings yet
- Diploma QPDocument2 pagesDiploma QPgkarthikeyanNo ratings yet
- Chapter 02 Multiple Choice Questions With AnswersDocument2 pagesChapter 02 Multiple Choice Questions With AnswersKuldeep Kushwaha100% (2)
- Me6602 2M RejinpaulDocument21 pagesMe6602 2M Rejinpaulfahamith ahamedNo ratings yet
- Automobile Engineering.M1Document14 pagesAutomobile Engineering.M1gkarthikeyanNo ratings yet
- UGC Regulations 2016Document10 pagesUGC Regulations 2016gkarthikeyanNo ratings yet
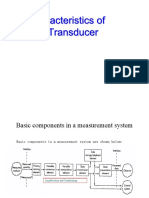
- Characteristic of TransducerDocument40 pagesCharacteristic of Transducergkarthikeyan50% (2)
- Chapter 02 Multiple Choice Questions With AnswersDocument2 pagesChapter 02 Multiple Choice Questions With AnswersKuldeep Kushwaha100% (2)
- Automobile Engg 2 MarksDocument20 pagesAutomobile Engg 2 Markskrishna8808No ratings yet
- Automobile Engineering (May2014) PDFDocument2 pagesAutomobile Engineering (May2014) PDFgkarthikeyanNo ratings yet
- Automobile Engg 2 MarksDocument20 pagesAutomobile Engg 2 Markskrishna8808No ratings yet
- Automobile Engg 2 MarksDocument20 pagesAutomobile Engg 2 Markskrishna8808No ratings yet
- Machine Design - Lesson 14 Design of ShaftsDocument4 pagesMachine Design - Lesson 14 Design of ShaftsgkarthikeyanNo ratings yet