You might also like
- Characteristics of Trochoids and Their Application To Determining Gear Teeth Fillet ShapesDocument14 pagesCharacteristics of Trochoids and Their Application To Determining Gear Teeth Fillet ShapesJohn FelemegkasNo ratings yet
- Module IV: Gears and Gear TrainsDocument38 pagesModule IV: Gears and Gear TrainsSuraj VinayNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute GearingDocument6 pagesCycloid Drive - Replaced by Planocentric Involute GearingMax GrandeNo ratings yet
- A Crowning Achievement For Automotive ApplicationsDocument10 pagesA Crowning Achievement For Automotive ApplicationsCan CemreNo ratings yet
- Design and Analysis Procedures For Shafts and Splines: Paul E. BurkeDocument21 pagesDesign and Analysis Procedures For Shafts and Splines: Paul E. BurkeBalasrinivasan Murugan100% (3)
- Boston Gear Helical GearsDocument14 pagesBoston Gear Helical GearssandchiNo ratings yet
- Contact Stress Analysis of Spur Gear Teeth Pair PDFDocument6 pagesContact Stress Analysis of Spur Gear Teeth Pair PDFCan CemreNo ratings yet
- Home Search Collections Journals About Contact Us My IopscienceDocument8 pagesHome Search Collections Journals About Contact Us My IopscienceCan CemreNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute Gearing PDFDocument6 pagesCycloid Drive - Replaced by Planocentric Involute Gearing PDFMax GrandeNo ratings yet
- Rating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDocument6 pagesRating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDavide MaranoNo ratings yet
- Gear TechnologyDocument52 pagesGear TechnologyJithinNo ratings yet
- Bonfiglioli Geared MotorDocument584 pagesBonfiglioli Geared MotorProdip SarkarNo ratings yet
- GB/T 10095.2-2008 Cylindrical Gears Accuracy StandardDocument5 pagesGB/T 10095.2-2008 Cylindrical Gears Accuracy StandardtaghdirimNo ratings yet
- Helicoil Catalog - hc2000 Rev.5Document36 pagesHelicoil Catalog - hc2000 Rev.5Hugo CastroNo ratings yet
- Effect of Increased Center Distance on Gear Teeth Contact Ratio and StressDocument21 pagesEffect of Increased Center Distance on Gear Teeth Contact Ratio and StressDavide MaranoNo ratings yet
- Agma 2002 b88Document48 pagesAgma 2002 b88Nursena SEVİNÇNo ratings yet
- Name: Roll No: AssignmentDocument6 pagesName: Roll No: Assignmentigualdi53No ratings yet
- The Synthesis of Elliptical Gears Generated by Shaper-CuttersDocument9 pagesThe Synthesis of Elliptical Gears Generated by Shaper-CuttersBen TearleNo ratings yet
- Measurements & Metrology (English)Document29 pagesMeasurements & Metrology (English)Kumar SubramanianNo ratings yet
- Gear DesignDocument83 pagesGear DesignmuhammadaminjamalmutNo ratings yet
- The Application of Bevel GearsDocument6 pagesThe Application of Bevel GearsPrasanth ThiagarajanNo ratings yet
- 5.1 Chordal Tooth Thickness MeasurementDocument20 pages5.1 Chordal Tooth Thickness Measurementsharma RISHINo ratings yet
- Formulas in GearingDocument102 pagesFormulas in GearingKeo Dính Chuột100% (1)
- Gear Grinding: SoftwareDocument68 pagesGear Grinding: SoftwareTungNo ratings yet
- Agma 914 b04Document45 pagesAgma 914 b04Nursena SEVİNÇNo ratings yet
- Metallurgical Aspects of Gear and Shaft DesignDocument7 pagesMetallurgical Aspects of Gear and Shaft DesignSivaraman VisvanathanNo ratings yet
- Finite Element Analysis of Spur Gear Set PDFDocument85 pagesFinite Element Analysis of Spur Gear Set PDFCan CemreNo ratings yet
- Isis DriveDocument18 pagesIsis DriveTms ArnNo ratings yet
- 4 Dtic: Reliability and Life Prediction Methodology M60 Torsion BarsDocument60 pages4 Dtic: Reliability and Life Prediction Methodology M60 Torsion BarsTabiXh AahilNo ratings yet
- Agma 927 A01pdfDocument38 pagesAgma 927 A01pdfNursena SEVİNÇNo ratings yet
- Thermal Lead Correction For High-Speed Gears: Sinto America, IncDocument92 pagesThermal Lead Correction For High-Speed Gears: Sinto America, IncRongbaaz BongNo ratings yet
- CAD-based Simulation of The Hobbing ProcessDocument11 pagesCAD-based Simulation of The Hobbing ProcessGabriel MariusNo ratings yet
- Worm gear calculation softwareDocument22 pagesWorm gear calculation softwarekismugan0% (1)
- Harmonic DriveDocument52 pagesHarmonic DriveRahul TanwarNo ratings yet
- Comparison of AGMA .2001, and ISO, 6336 Ratings Tor Four Gear Sets-McvittieDocument4 pagesComparison of AGMA .2001, and ISO, 6336 Ratings Tor Four Gear Sets-McvittiewholenumberNo ratings yet
- Steering Universal JointsDocument11 pagesSteering Universal JointsAman JainNo ratings yet
- Design and Analysis of A Spiral Bevel GearDocument90 pagesDesign and Analysis of A Spiral Bevel Gearsigit-sahyanto-61220% (1)
- Iso 13282013Document15 pagesIso 13282013Kailas KatharNo ratings yet
- Siemens PLM LMS Solutions For Pass by Noise EngineeringDocument16 pagesSiemens PLM LMS Solutions For Pass by Noise EngineeringHiren SonaiyaNo ratings yet
- Iso 6336 5 1996 PDFDocument13 pagesIso 6336 5 1996 PDFThanh LongNo ratings yet
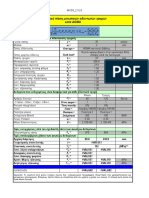
- Σχεδιασμός σε επιφανειακή πίεση μετωπικών οδοντωτών τροχών κατά AGMADocument1 pageΣχεδιασμός σε επιφανειακή πίεση μετωπικών οδοντωτών τροχών κατά AGMAkstayroskNo ratings yet
- Design of Bevel and Worm Gear: Machine Element IIDocument60 pagesDesign of Bevel and Worm Gear: Machine Element IIkibromgidey12No ratings yet
- A Kinematic Analysis of Meshing Polymer Gear TeethDocument16 pagesA Kinematic Analysis of Meshing Polymer Gear TeethsandeepNo ratings yet
- Dynamic Factor FormulaeDocument15 pagesDynamic Factor FormulaeShubham More0% (1)
- GEAR TOOTH PROFILESDocument5 pagesGEAR TOOTH PROFILESpremnathgopinathanNo ratings yet
- A Comparison of Current AGMA ISO API Gear Rating Methods PDFDocument84 pagesA Comparison of Current AGMA ISO API Gear Rating Methods PDFNARENDRASINH PARMARNo ratings yet
- DIN-58405-3-1972 Spur Gear Drives For Fine Mechanics - Indication in Drawings, Examples For Calculation PDFDocument20 pagesDIN-58405-3-1972 Spur Gear Drives For Fine Mechanics - Indication in Drawings, Examples For Calculation PDFthaivinhtuyNo ratings yet
- Gleason LTCA ExampleDocument8 pagesGleason LTCA ExamplereddykvsNo ratings yet
- An Investigation of The Fatigue and Fretting PerformanceDocument19 pagesAn Investigation of The Fatigue and Fretting PerformanceKrishna PrasadNo ratings yet
- Bevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothDocument3 pagesBevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothVetri VelNo ratings yet
- Optimization of Planetary Gear Box For High Reduction RatioDocument12 pagesOptimization of Planetary Gear Box For High Reduction RatioNovriansyah BrianNo ratings yet
- Precision Involute Gear Hob DesignDocument11 pagesPrecision Involute Gear Hob DesignKalyan ChakravarthyNo ratings yet
- Ansi Agma 2000 A88Document4 pagesAnsi Agma 2000 A88vijaykumarn0% (1)
- Introduction To Universal Gear ShavingDocument48 pagesIntroduction To Universal Gear ShavingNagesh KamannaNo ratings yet
- APR11 Bearing Software BrochureDocument8 pagesAPR11 Bearing Software BrochureDagim GirmaNo ratings yet
- ST-Developer Release Notes: STEP Tools SoftwareDocument48 pagesST-Developer Release Notes: STEP Tools SoftwareMuhammed A. MahdiNo ratings yet
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987From EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonNo ratings yet
- Mechanisms: Kinematic Analysis and Applications in RoboticsFrom EverandMechanisms: Kinematic Analysis and Applications in RoboticsNo ratings yet
- Math 10 Q1 Answer KeyDocument12 pagesMath 10 Q1 Answer KeyChristopher Brown80% (5)
- Homework # 4 Question # 1Document8 pagesHomework # 4 Question # 1Abdul MueedNo ratings yet
- 1 Asymptotic Notation - Algorithms (Series Lecture)Document35 pages1 Asymptotic Notation - Algorithms (Series Lecture)turjo987No ratings yet
- National Senior Certificate: Grade 11Document14 pagesNational Senior Certificate: Grade 11rowan chibiNo ratings yet
- LECTURE NO. 5 Measures of Central TendencyDocument27 pagesLECTURE NO. 5 Measures of Central TendencyCzarina GuevarraNo ratings yet
- Summary of Equations and Concepts - Conic SectionsDocument3 pagesSummary of Equations and Concepts - Conic SectionsJohn Wilbert OrillaNo ratings yet
- 5.3 - DeMoivre's Theorem and Powers of Complex Numbers - Mathematics LibreTextsDocument6 pages5.3 - DeMoivre's Theorem and Powers of Complex Numbers - Mathematics LibreTextsHot KidNo ratings yet
- Math Quiz To g11Document4 pagesMath Quiz To g11api-33961154889% (9)
- NIMCET 2023 Original Paper INPS ClassesDocument34 pagesNIMCET 2023 Original Paper INPS Classessajot62758No ratings yet
- Wavelets and Multi-Resolution ProcessingDocument31 pagesWavelets and Multi-Resolution ProcessingsrichitsNo ratings yet
- Module 9Document95 pagesModule 9Kush JuvekarNo ratings yet
- STAT 6100 - MATH 6180 Lecture 18 - Mean Time Spent in Transient StatesDocument7 pagesSTAT 6100 - MATH 6180 Lecture 18 - Mean Time Spent in Transient StatesRamana NimaiNo ratings yet
- All Formulas: Ca Foundation MathematicsDocument114 pagesAll Formulas: Ca Foundation MathematicsHimanshu SinghNo ratings yet
- NUMERICAL METHODS IN QUANTUM MECHANICSDocument101 pagesNUMERICAL METHODS IN QUANTUM MECHANICSAnderson Buarque100% (1)
- Ee 301 - Circuit Theory & Networks: Multiple Choice Type QuestionsDocument5 pagesEe 301 - Circuit Theory & Networks: Multiple Choice Type QuestionsGsn ReddyNo ratings yet
- 200+ Maths Exploration IdeasDocument2 pages200+ Maths Exploration IdeasShruti KabraNo ratings yet
- One Dimensional Wave EquationDocument9 pagesOne Dimensional Wave EquationMario BacicNo ratings yet
- Bezier Curve 1 PDFDocument4 pagesBezier Curve 1 PDFAnsuman MahantyNo ratings yet
- Differential Geometry and Computer VisionDocument41 pagesDifferential Geometry and Computer VisionApple ForScaleNo ratings yet
- Mit6 251JF09 SDPDocument51 pagesMit6 251JF09 SDPtap1cseNo ratings yet
- Nays2dFlood PDFDocument28 pagesNays2dFlood PDFFranco QuispeNo ratings yet
- Matrix Reduction Using The Hungarian Method For The Generation of School TimetablesDocument6 pagesMatrix Reduction Using The Hungarian Method For The Generation of School TimetablesEduardo Correa ChuraNo ratings yet
- Lec7 FullDocument35 pagesLec7 FullHà VânNo ratings yet
- Numerical Tech For Interpolation & Curve FittingDocument46 pagesNumerical Tech For Interpolation & Curve FittingChatchai ManathamsombatNo ratings yet
- !MA2001 Summary NotesDocument12 pages!MA2001 Summary NotesXie NiyunNo ratings yet
- Exam 2 Cheat SheetDocument3 pagesExam 2 Cheat SheetMac JonesNo ratings yet
- Linear DE Solutions with Constant CoefficientsDocument18 pagesLinear DE Solutions with Constant CoefficientsRoumen GuhaNo ratings yet
- Science Faculty ProspectusDocument43 pagesScience Faculty ProspectusYashas k nNo ratings yet
- Perfect Squares and Square Roots GuideDocument8 pagesPerfect Squares and Square Roots GuideEljohn Angelo LopezNo ratings yet
- Basic Engineering Mathematics 7 Edition: John BirdDocument3 pagesBasic Engineering Mathematics 7 Edition: John BirdnoctuaryNo ratings yet