You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Voltage RampDocument5 pagesVoltage RampRanjitha JadhavNo ratings yet
- 2-Megabit (256K X 8) 5-Volt Only Flash Memory AT29C020: FeaturesDocument17 pages2-Megabit (256K X 8) 5-Volt Only Flash Memory AT29C020: Featuresamskroud brahimNo ratings yet
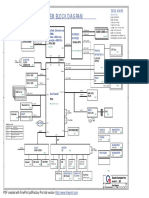
- Quanta Zr7 r3b 20100222 SchematicsDocument50 pagesQuanta Zr7 r3b 20100222 Schematicsmaskacrut9644No ratings yet
- ComfortLine5 PDFDocument168 pagesComfortLine5 PDFcdimisNo ratings yet
- 13 - CountersDocument33 pages13 - CountersSauhard AdtiyaNo ratings yet
- Mitsubishi F700 VFD Manual-Applied-Japanese DomesticDocument303 pagesMitsubishi F700 VFD Manual-Applied-Japanese DomesticMROstop.comNo ratings yet
- 8085 MP ManualDocument97 pages8085 MP ManualChintan ShahNo ratings yet
- 2 Sa 1020Document3 pages2 Sa 1020Luiz Clemente PimentaNo ratings yet
- Electrical Science: Lecture-5: Topic-Nodal and Mesh AnalysisDocument13 pagesElectrical Science: Lecture-5: Topic-Nodal and Mesh Analysisi_khandelwalNo ratings yet
- Danfoss FC 301-302 AngDocument268 pagesDanfoss FC 301-302 AngkudakwasheNo ratings yet
- Project Report IR Remote TesterDocument7 pagesProject Report IR Remote TesterNarendar Kumar Oad100% (1)
- MPX4250A DatasheetDocument11 pagesMPX4250A DatasheetJucaNo ratings yet
- Advanced Communication Lab ManualDocument69 pagesAdvanced Communication Lab Manualbhavanimaddula50% (4)
- Thyristor Controlled Voltage Regulators: Working Group B4.35Document70 pagesThyristor Controlled Voltage Regulators: Working Group B4.35cryss_89No ratings yet
- Communication CircuitsDocument37 pagesCommunication CircuitsDenzel Ivan PalatinoNo ratings yet
- Microwave CommDocument3 pagesMicrowave CommAylie PilobelloNo ratings yet
- Tascam US-144MKII ManualDocument36 pagesTascam US-144MKII ManualjunkmailmasterNo ratings yet
- Advanced Computer Arc. EXAMDocument128 pagesAdvanced Computer Arc. EXAMberhe2121No ratings yet
- PRINT - Service Manuals - Service Manual MC Kinley Eu GD 13 06 2019Document73 pagesPRINT - Service Manuals - Service Manual MC Kinley Eu GD 13 06 2019Sebastian PettersNo ratings yet
- Icctpea14 RTL SDRDocument17 pagesIcctpea14 RTL SDRYgb RedaNo ratings yet
- B07S (E) 411/B07S411K / B07S401K Instrunction Sheet: (1) PrefaceDocument8 pagesB07S (E) 411/B07S411K / B07S401K Instrunction Sheet: (1) PrefaceМихаил БорозанNo ratings yet
- PDU-G1, 2: UHF Sensor For Partial Discharge Monitoring of GIS/GILDocument2 pagesPDU-G1, 2: UHF Sensor For Partial Discharge Monitoring of GIS/GILHafiziAhmadNo ratings yet
- SVEN E-217b Headphone Manual EnglishDocument6 pagesSVEN E-217b Headphone Manual EnglishKevinNo ratings yet
- Arduino Modules L298NDocument4 pagesArduino Modules L298NNermin FejzicNo ratings yet
- Ce Assignment Set 13 PDFDocument6 pagesCe Assignment Set 13 PDFece.kavitha mamcetNo ratings yet
- Study of Nec Transmitter: C CCCCCCCCCCCCCCDocument36 pagesStudy of Nec Transmitter: C CCCCCCCCCCCCCCnvstsriharshaNo ratings yet
- 2020-MOTL-Broadband Rasorber With In-Band Transmission-AditiDocument9 pages2020-MOTL-Broadband Rasorber With In-Band Transmission-AditiSaptarshi GhoshNo ratings yet
- CELWAVE DuplexersDocument4 pagesCELWAVE Duplexersdavidkumul02No ratings yet
- Logix5000 Controllers - CPU Clock SpeedsDocument3 pagesLogix5000 Controllers - CPU Clock SpeedsMarisolNo ratings yet
- HW 2Document1 pageHW 2tinhtrilacNo ratings yet