You might also like
- A Survey On Wireless Position EstimationDocument20 pagesA Survey On Wireless Position EstimationMona GuptaNo ratings yet
- Partial Discharge Localization Based On Received Signal StrengthDocument4 pagesPartial Discharge Localization Based On Received Signal StrengthHamd MohamedNo ratings yet
- 1890-Article Text-9703-1-10-20210505Document7 pages1890-Article Text-9703-1-10-20210505محمد مطيعNo ratings yet
- IJCA Paper PDFDocument4 pagesIJCA Paper PDFdwirelesNo ratings yet
- A Survey On Wireless Position EstimationDocument21 pagesA Survey On Wireless Position EstimationwanfaaNo ratings yet
- An Interpolation Algorithm For Discrete Fourier Transforms of Weighted Damped Sinusoidal SignalsDocument9 pagesAn Interpolation Algorithm For Discrete Fourier Transforms of Weighted Damped Sinusoidal SignalsFabien CallodNo ratings yet
- LISTS ALGS Elnahrawy04limitsDocument9 pagesLISTS ALGS Elnahrawy04limitsLi XuanjiNo ratings yet
- Anais - SBRT - 2017 (PDF - Io)Document5 pagesAnais - SBRT - 2017 (PDF - Io)antonio peixotoNo ratings yet
- Efficient Convex Solution For 3-D Localization in MIMO Radars Using Delay and Angle MeasurementsDocument5 pagesEfficient Convex Solution For 3-D Localization in MIMO Radars Using Delay and Angle Measurementsrahul kumarNo ratings yet
- Beamforming and Tracking Assessment With Passive Radar Experimental DataDocument6 pagesBeamforming and Tracking Assessment With Passive Radar Experimental Datadhyan shahNo ratings yet
- An Adaptive Threshold Based Energy Detector For Spectrum Sensing in Cognitive Radios at Low SNRDocument5 pagesAn Adaptive Threshold Based Energy Detector For Spectrum Sensing in Cognitive Radios at Low SNRsuchi87No ratings yet
- Comparaison AlgosDocument5 pagesComparaison AlgosLamiae SqualiNo ratings yet
- Low-PAPR OFDM Waveform Design For Radar and Communication SystemsDocument6 pagesLow-PAPR OFDM Waveform Design For Radar and Communication Systemssharmaald901No ratings yet
- Channel Estimation of OFDM System Using Adaptive Boosting AlgorithmDocument5 pagesChannel Estimation of OFDM System Using Adaptive Boosting Algorithmdearprasanta6015No ratings yet
- High-Resolution Direct Position Determination Using MVDRDocument13 pagesHigh-Resolution Direct Position Determination Using MVDRMostafa NaseriNo ratings yet
- Correlation Coefficient Calculations For MIMO Antenna Systems: A Comparative StudyDocument14 pagesCorrelation Coefficient Calculations For MIMO Antenna Systems: A Comparative StudyUsman Qureshi100% (1)
- Regional Propagation Model Based Fingerprinting Localization in Indoor EnvironmentsDocument5 pagesRegional Propagation Model Based Fingerprinting Localization in Indoor EnvironmentsMohamed Arbi Ben YounesNo ratings yet
- Prashob2010 PDFDocument5 pagesPrashob2010 PDFSachin PatilNo ratings yet
- Performance Analysis of The Periodogram-Based Energy Detector in Fading ChannelsDocument10 pagesPerformance Analysis of The Periodogram-Based Energy Detector in Fading ChannelsAbdul RahimNo ratings yet
- Rado Savlje Vic 2009Document13 pagesRado Savlje Vic 2009DomRuanNo ratings yet
- A Power Assignment Method For Multi-Sink WSN With Outage Probability ConstraintsDocument8 pagesA Power Assignment Method For Multi-Sink WSN With Outage Probability ConstraintsS.Aatif GulrezNo ratings yet
- Array Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksDocument17 pagesArray Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksTrilochan PanigrahiNo ratings yet
- Analysis of Timing Synchronization Techniques in OFDM For SDR Waveform Performance ComparisonDocument6 pagesAnalysis of Timing Synchronization Techniques in OFDM For SDR Waveform Performance ComparisonÖzkan SezerNo ratings yet
- Diffrential Rss (Mohem)Document6 pagesDiffrential Rss (Mohem)Riham AbdallahNo ratings yet
- A Joint ML Estimation Technique For Timing, CFO and Channel For OFDMA Uplink TransmissionsDocument5 pagesA Joint ML Estimation Technique For Timing, CFO and Channel For OFDMA Uplink TransmissionsTafazul IjazNo ratings yet
- Design and Simulation of Range Estimation in Residential Building Using IEEE 802.11b WLAN NetworksDocument5 pagesDesign and Simulation of Range Estimation in Residential Building Using IEEE 802.11b WLAN NetworkstheijesNo ratings yet
- Characterization of Signal Attenuation Using Pathloss Exponent in South-South NigeriaDocument5 pagesCharacterization of Signal Attenuation Using Pathloss Exponent in South-South NigeriaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Joint Clip and Quantization Effects Characterization in OFDM ReceiversDocument8 pagesJoint Clip and Quantization Effects Characterization in OFDM ReceiversBruno BarcellosNo ratings yet
- Mobile Station Location Using Genetic Algorithm Optimized Radio Frequency FingerprintingDocument5 pagesMobile Station Location Using Genetic Algorithm Optimized Radio Frequency Fingerprintingraman yarramilliNo ratings yet
- Argencon 2018 Paper 172Document4 pagesArgencon 2018 Paper 172msoto20052576No ratings yet
- 1563 3204 1 SMDocument7 pages1563 3204 1 SMBloko BudiNo ratings yet
- Steendam - 2018 - A 3-D Positioning Algorithm For AOA-Based VLP With An Aperture-Based ReceiverDocument11 pagesSteendam - 2018 - A 3-D Positioning Algorithm For AOA-Based VLP With An Aperture-Based ReceiverJavier MelendrezNo ratings yet
- Nodes Localization Through Data Fusion in Sensor NetworkDocument6 pagesNodes Localization Through Data Fusion in Sensor NetworkWabas AustraliaNo ratings yet
- Real Time Position Location & Tracking (PL&T) Using Prediction Filter and Integrated Zone Finding in OFDM ChannelDocument10 pagesReal Time Position Location & Tracking (PL&T) Using Prediction Filter and Integrated Zone Finding in OFDM ChannelIlker BalkanNo ratings yet
- Spectrum Sensing Using Collaborative Beamforming For Ad Hoc Cognitive Radio NetworksDocument4 pagesSpectrum Sensing Using Collaborative Beamforming For Ad Hoc Cognitive Radio Networkssathish14singhNo ratings yet
- Bayesian and RBF Structures For Re Less Co U Cat Ions Detect IonDocument10 pagesBayesian and RBF Structures For Re Less Co U Cat Ions Detect IonAr FatimzahraNo ratings yet
- Ns2 Simulator Capabilities in Nodes Localization in Wireless NetworksDocument5 pagesNs2 Simulator Capabilities in Nodes Localization in Wireless NetworksMaris WaranNo ratings yet
- MIMO Radar A Idea Whose Time Has ComeDocument8 pagesMIMO Radar A Idea Whose Time Has Cometrongnguyen29No ratings yet
- Mor 2015 - Comparación de Metodos de Estimación de Carga en DP en CablesDocument8 pagesMor 2015 - Comparación de Metodos de Estimación de Carga en DP en CablesGerardoNo ratings yet
- Accurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationDocument7 pagesAccurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationUtpal DasNo ratings yet
- Spectrum Sensing Techniques: A Comparison Between Energy Detector and Cyclostationarity DetectorDocument6 pagesSpectrum Sensing Techniques: A Comparison Between Energy Detector and Cyclostationarity Detectorsuchi87No ratings yet
- An Approach For OTSPR - SubmissionDocument6 pagesAn Approach For OTSPR - SubmissionnstNo ratings yet
- Liu, Huang, Zhou - 2012 - An Efficient Maximum Likelihood Method For Direction-Of-Arrival Estimation Via Sparse Bayesian LearningDocument11 pagesLiu, Huang, Zhou - 2012 - An Efficient Maximum Likelihood Method For Direction-Of-Arrival Estimation Via Sparse Bayesian LearningJavier MelendrezNo ratings yet
- Channel Prediction in Point-to-Point MIMO-Systems: Nico Palleit, Tobias WeberDocument5 pagesChannel Prediction in Point-to-Point MIMO-Systems: Nico Palleit, Tobias WeberFreddyJaraNo ratings yet
- Publi 7237Document6 pagesPubli 7237Bojan SubasicNo ratings yet
- Accurate Wirelength Prediction For Placement Aware Synthesis Through Machine Learning 2019Document4 pagesAccurate Wirelength Prediction For Placement Aware Synthesis Through Machine Learning 2019Eric WangNo ratings yet
- Airborne Radar Signal Processor Realisation: Reena Mamgain and Rashi JainDocument3 pagesAirborne Radar Signal Processor Realisation: Reena Mamgain and Rashi JainAhmed HussainNo ratings yet
- Improved Energy Detector Based Spectrum Sensing For Cognitive Radio: An Experimental StudyDocument5 pagesImproved Energy Detector Based Spectrum Sensing For Cognitive Radio: An Experimental Studysuchi87No ratings yet
- Spectrum Sensing Measurement Using GNU Radio and USRP Software Radio PlatformDocument6 pagesSpectrum Sensing Measurement Using GNU Radio and USRP Software Radio PlatformCharly BskzNo ratings yet
- Cyclostationary-Based Architectures ForDocument5 pagesCyclostationary-Based Architectures ForRaman KanaaNo ratings yet
- W1129Document16 pagesW1129Tamil VananNo ratings yet
- A Target Localization Algorithm For Wireless Sensor Network Based On Compressed SensingDocument11 pagesA Target Localization Algorithm For Wireless Sensor Network Based On Compressed SensingMustafamna Al SalamNo ratings yet
- Statistical Evaluation of The Azimuth and Elevation Angles Seen at The Output of The Receiving AntennaDocument6 pagesStatistical Evaluation of The Azimuth and Elevation Angles Seen at The Output of The Receiving AntennaJavier MelendrezNo ratings yet
- Little Pilot Is Needed For Channel Estimation With Integrated Super-Resolution Sensing and CommunicationDocument6 pagesLittle Pilot Is Needed For Channel Estimation With Integrated Super-Resolution Sensing and CommunicationborghesitommasoNo ratings yet
- Joint Channel Estimation and Prediction For OFDM Systems: Ian C. Wong and Brian L. EvansDocument17 pagesJoint Channel Estimation and Prediction For OFDM Systems: Ian C. Wong and Brian L. Evansmaheshwarivikas1982No ratings yet
- Paper 2-Color Radiomap Interpolation For Efficient Fingerprint WiFi-based Indoor Location Estimation PDFDocument6 pagesPaper 2-Color Radiomap Interpolation For Efficient Fingerprint WiFi-based Indoor Location Estimation PDFRakhmadhanyPrimanandaNo ratings yet
- 1 Vol 14 No 1Document10 pages1 Vol 14 No 1krishanaknthreddyNo ratings yet
- RADAR An In-Building RF-Based User Location and Tracking SystemDocument16 pagesRADAR An In-Building RF-Based User Location and Tracking Systemahmaddeny6No ratings yet
- Serial PN Acquisition Using Smart Antenna and Censored Mean Level CFAR Adaptive Thresholding For A DS/CDMA Mobile CommunicationDocument6 pagesSerial PN Acquisition Using Smart Antenna and Censored Mean Level CFAR Adaptive Thresholding For A DS/CDMA Mobile Communicationjouini abdelhafidNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- journal_jpe_16-3_109140575Document12 pagesjournal_jpe_16-3_109140575ramkumars4No ratings yet
- CurrentModeControlforLLCSeriesResonantDc-to-DcConvertersDocument7 pagesCurrentModeControlforLLCSeriesResonantDc-to-DcConvertersramkumars4No ratings yet
- 00982262Document11 pages00982262Balkrushna KankotiyaNo ratings yet
- (AMW0201) Design of Integrated Inverted F Antennas Made of Asymmetrical Coplanar StriplinesDocument6 pages(AMW0201) Design of Integrated Inverted F Antennas Made of Asymmetrical Coplanar Striplinesramkumars4No ratings yet
- Filter Design in Thirty Seconds: Bruce Carter High Performance AnalogDocument14 pagesFilter Design in Thirty Seconds: Bruce Carter High Performance Analogpatrick_carballoNo ratings yet
- Health Management in Future HomeDocument2 pagesHealth Management in Future Homeramkumars4No ratings yet
- GSM Commands ListDocument199 pagesGSM Commands ListKoushik ShettyNo ratings yet
- CV HayatDocument2 pagesCV Hayatmuhammadhayat322No ratings yet
- Iot Based Hand Gesture Controlled Robotic ArmDocument13 pagesIot Based Hand Gesture Controlled Robotic ArmVivek RahangdaleNo ratings yet
- Atca MGW WorkshopDocument106 pagesAtca MGW Workshopgaussyn100% (2)
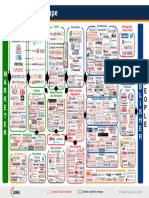
- Display LUMAscapeDocument1 pageDisplay LUMAscapevaibhavgurav609No ratings yet
- Standard TTL: Digital Electronics Transistor - Transistor LogicDocument8 pagesStandard TTL: Digital Electronics Transistor - Transistor LogicSambhav ChaturvediNo ratings yet
- Automatic Medicine Vending System-Medical AtmDocument6 pagesAutomatic Medicine Vending System-Medical Atmjordan ruzarioNo ratings yet
- U.S. Naval Academy Computer Science Department Technical Report. Resource Contrained Network Design and ImplementationDocument25 pagesU.S. Naval Academy Computer Science Department Technical Report. Resource Contrained Network Design and ImplementationSewist ManNo ratings yet
- Captive Earth Station A.C.Subudhi DDG (E)Document18 pagesCaptive Earth Station A.C.Subudhi DDG (E)Shishir GuptaNo ratings yet
- Ivis 60 Expert: Shared-Service, Great Value!Document3 pagesIvis 60 Expert: Shared-Service, Great Value!انس القاضيNo ratings yet
- Digital Revolution InfographicDocument1 pageDigital Revolution InfographicAjay KumarNo ratings yet
- Brochure Rosemounttm Tank Gauging System Spare Parts en 104512Document48 pagesBrochure Rosemounttm Tank Gauging System Spare Parts en 104512Vitor BandeiraNo ratings yet
- 3G RF Resource Monitoring Principle: For The Case of Addis Ababa 3G NetworkDocument19 pages3G RF Resource Monitoring Principle: For The Case of Addis Ababa 3G NetworkAbdi MaulanaNo ratings yet
- Simulation Design of Compact Stepped-Frequency Continuous-Wave Through-Wall RadarDocument4 pagesSimulation Design of Compact Stepped-Frequency Continuous-Wave Through-Wall RadarkuscuzNo ratings yet
- CVP 2200A Manual E09Document17 pagesCVP 2200A Manual E09minhNo ratings yet
- Broadband and Low-Profile Microstrip Antenna Using Strip-Slot Hybrid StructureDocument4 pagesBroadband and Low-Profile Microstrip Antenna Using Strip-Slot Hybrid StructureHải ĐăngNo ratings yet
- Assignment 3Document1 pageAssignment 3Robert Tatenda ZataNo ratings yet
- Information Technology - Paper 2Document14 pagesInformation Technology - Paper 2••Bonnie Boo••No ratings yet
- Optical Network Design For 4G Long Term Evolution Distribution Network in SlemanDocument2 pagesOptical Network Design For 4G Long Term Evolution Distribution Network in SlemanAzim WarNo ratings yet
- OmniClass Readers Data SheetDocument4 pagesOmniClass Readers Data SheetRyansyah SyaifNo ratings yet
- 890-399 GSM Manual Rev2.1-1Document24 pages890-399 GSM Manual Rev2.1-1SandroNo ratings yet
- Digital Design Interview Questions & AnswersDocument8 pagesDigital Design Interview Questions & Answersmohit009dudeNo ratings yet
- Configure Multi-SA Virtual Tunnel Interface On IOS-XE Router - Tech ZoneDocument7 pagesConfigure Multi-SA Virtual Tunnel Interface On IOS-XE Router - Tech ZoneAkash ThakurNo ratings yet
- ODV 032R21K For - Russia - DS - 0 0 1Document1 pageODV 032R21K For - Russia - DS - 0 0 1Екатерина СеливерстоваNo ratings yet
- 6 Telecommunications and NetworksDocument30 pages6 Telecommunications and NetworksWilly AndersonNo ratings yet
- HP Laserjet M211 Printer Series: Data SheetDocument6 pagesHP Laserjet M211 Printer Series: Data Sheetjun chanNo ratings yet
- 755 - Tech Failure Case - BlackBerry FailureDocument10 pages755 - Tech Failure Case - BlackBerry FailureVishwa M swamiNo ratings yet
- DC 7 Unique Features BenefitsDocument2 pagesDC 7 Unique Features BenefitsUchiha AatacheNo ratings yet
- Kerio Support InfoDocument55 pagesKerio Support InforavaitsaNo ratings yet
- Edge Computing in 5G A ReviewDocument16 pagesEdge Computing in 5G A ReviewMarlon Xavier Aguirre CarchiNo ratings yet
- User Manual: Series 7 & 8Document24 pagesUser Manual: Series 7 & 8KonstantinosGNo ratings yet