You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Acb Selection & CalculationDocument18 pagesAcb Selection & CalculationYogesh DabholeNo ratings yet
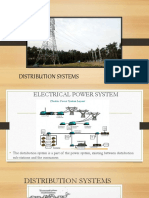
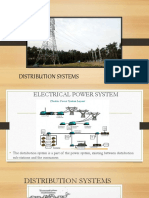
- Distributionsystems 150204040603 Conversion Gate01Document40 pagesDistributionsystems 150204040603 Conversion Gate01Yogesh DabholeNo ratings yet
- Distributionsystems 150204040603 Conversion Gate01Document40 pagesDistributionsystems 150204040603 Conversion Gate01Yogesh DabholeNo ratings yet
- Quiz 3 MCQ Corona Effect 1Document2 pagesQuiz 3 MCQ Corona Effect 1Yogesh DabholeNo ratings yet
- Energies PropertiesDocument16 pagesEnergies PropertiesYogesh DabholeNo ratings yet
- PR-Or Incomming Report Winter-2019Document6 pagesPR-Or Incomming Report Winter-2019Yogesh DabholeNo ratings yet
- Switchgear and ProtectionDocument8 pagesSwitchgear and ProtectionYogesh DabholeNo ratings yet
- Ch.1 Load Forecasting 1Document9 pagesCh.1 Load Forecasting 1Yogesh DabholeNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Synopsis Report ON Automatic Washroom Light Switch: Lakshmi Narain College of Technolgy and Science BhopalDocument4 pagesSynopsis Report ON Automatic Washroom Light Switch: Lakshmi Narain College of Technolgy and Science BhopalPrateek KaplayNo ratings yet
- Veris Schneider 2015Document348 pagesVeris Schneider 2015Ngọc Thanh VũNo ratings yet
- An Automated Multi Sensored Green House ManagementDocument4 pagesAn Automated Multi Sensored Green House Managementeditor_ijtelNo ratings yet
- Xerox Phaser+7400+Options+Parts+Service+ManualDocument1,102 pagesXerox Phaser+7400+Options+Parts+Service+ManualMarshall Holzderber100% (1)
- Fan Coil VAV 1 A 3 TR PDFDocument8 pagesFan Coil VAV 1 A 3 TR PDFSaid Marino CarrascoNo ratings yet
- Siemens Loa24 171b2em ManualDocument16 pagesSiemens Loa24 171b2em Manualsami sofianeNo ratings yet
- 8200 MotecDocument3 pages8200 Motecyera1No ratings yet
- LA4 Ohm's LawDocument20 pagesLA4 Ohm's LawHanna GalinatoNo ratings yet
- Bioclass: Product DatasheetDocument2 pagesBioclass: Product Datasheetdiasjoy67No ratings yet
- Nehs06780001 - Multimeter OperationDocument8 pagesNehs06780001 - Multimeter OperationMontell JordanNo ratings yet
- Routh Criterion - Tutorial 7 - Co - 12Document3 pagesRouth Criterion - Tutorial 7 - Co - 12Haelu KuNo ratings yet
- Technical Specification of VCB PDFDocument23 pagesTechnical Specification of VCB PDFneharoybhushan100% (1)
- Be8251 Basic Electrical and Electronics Engineering L T P CDocument1 pageBe8251 Basic Electrical and Electronics Engineering L T P CselvanNo ratings yet
- RC CircuitsDocument4 pagesRC Circuitsjack daniels0% (1)
- DRV5055 Ratiometric Linear Hall Effect Sensor: 1 Features 3 DescriptionDocument32 pagesDRV5055 Ratiometric Linear Hall Effect Sensor: 1 Features 3 DescriptionGavinNo ratings yet
- Kollmorgen KBM Series 2011 CatalogDocument80 pagesKollmorgen KBM Series 2011 CatalogElectromateNo ratings yet
- Installation Manual DPC-411 CabinetsDocument16 pagesInstallation Manual DPC-411 CabinetsalternativblueNo ratings yet
- SE-CUR-CLAMP-1800-DC Current Clamp Datasheet 100exDocument1 pageSE-CUR-CLAMP-1800-DC Current Clamp Datasheet 100exlek888No ratings yet
- J604Document1 pageJ604SilviopkNo ratings yet
- UDR MANUFACTURE ManufacturesDocument8 pagesUDR MANUFACTURE ManufacturesQuadri Consultancy ServicesNo ratings yet
- Renewable and Sustainable Energy Reviews: Kafeel Ahmed Kalwar, Muhammad Aamir, Saad MekhilefDocument14 pagesRenewable and Sustainable Energy Reviews: Kafeel Ahmed Kalwar, Muhammad Aamir, Saad Mekhilefchanchalv_678018469No ratings yet
- F1500-G ManualE PDFDocument75 pagesF1500-G ManualE PDFzeljoasNo ratings yet
- Ac Circuit Lec-1 NotesDocument11 pagesAc Circuit Lec-1 NotesAhmad bhattiNo ratings yet
- 3.3-Phase IM Motor Using 1-Phase Supply6.Document9 pages3.3-Phase IM Motor Using 1-Phase Supply6.SriSruthi KolliparaNo ratings yet
- Arduino Upgraded Learning Kit ManualDocument116 pagesArduino Upgraded Learning Kit Manualjohn christian de leonNo ratings yet
- Safe Flame Scan I (Manual)Document0 pagesSafe Flame Scan I (Manual)ntpckanihaNo ratings yet
- FX-CUBE Hardware Manual V100.enDocument5 pagesFX-CUBE Hardware Manual V100.enВячеслав Якимов100% (1)
- Single - Stage BJT Amplifier: Experiment No. 1Document12 pagesSingle - Stage BJT Amplifier: Experiment No. 1Yousef BobadillaNo ratings yet
- Service Manual Service Manual: SKS-HT540 (B)Document19 pagesService Manual Service Manual: SKS-HT540 (B)Carlos DalsinNo ratings yet
- EX3G HMI PLC All-In-One User ManualDocument2 pagesEX3G HMI PLC All-In-One User ManualKarim NasriNo ratings yet