You might also like
- Causes of Negative Dissipation FactorDocument14 pagesCauses of Negative Dissipation FactorTravis Wood100% (2)
- Wideband RF Technologies and Antennas in Microwave FrequenciesFrom EverandWideband RF Technologies and Antennas in Microwave FrequenciesNo ratings yet
- Matlab ProgramingDocument32 pagesMatlab ProgramingKorlpate BhaskarNo ratings yet
- Power System II Lab ManualDocument20 pagesPower System II Lab ManualPrasenjit Dey100% (1)
- 30GX Wiring 533-084 30HX Chiller CarrierDocument34 pages30GX Wiring 533-084 30HX Chiller Carrieryamamoto_san100% (5)
- Computation of Transmission Lines Parameters-Ex1Document10 pagesComputation of Transmission Lines Parameters-Ex1Anonymous gAVMpR0aNo ratings yet
- Ex-801 Caps Practical FileDocument20 pagesEx-801 Caps Practical FileShubham Pal100% (1)
- Measurement While Drilling: Signal Analysis, Optimization and DesignFrom EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignNo ratings yet
- Power System Simulation Lab ManualDocument41 pagesPower System Simulation Lab ManualgokulchandruNo ratings yet
- Fuling Inverter User ManualDocument54 pagesFuling Inverter User ManualFayzan Hannan100% (7)
- He2013 Article SmallSignalStabilityAnalysisOfDocument8 pagesHe2013 Article SmallSignalStabilityAnalysisOfPrasenjit DeyNo ratings yet
- Power System 2Document46 pagesPower System 2Prakash Chandran CNo ratings yet
- Installation Manual Solar Controller PDFDocument11 pagesInstallation Manual Solar Controller PDFLhenzCNo ratings yet
- Power System Simulation Lab ManualDocument41 pagesPower System Simulation Lab ManualArivumani86% (14)
- 4 Computation of Transmission LinesDocument7 pages4 Computation of Transmission LinesLalith KrishnanNo ratings yet
- Line Parameters ComputationDocument4 pagesLine Parameters Computationswathi_grenNo ratings yet
- Comparative Evaluation of HVDC and HVAC Transmission SystemsDocument5 pagesComparative Evaluation of HVDC and HVAC Transmission SystemsZak TahirkheliNo ratings yet
- Sop For Esp ChargingDocument3 pagesSop For Esp ChargingrubanprabuNo ratings yet
- Ee 1404 Power System Lab ManualDocument63 pagesEe 1404 Power System Lab ManualSuhas Altruistic100% (1)
- Ee 1404 Power System Lab ManualDocument64 pagesEe 1404 Power System Lab ManualjayamanikandanNo ratings yet
- PS Simulation LabDocument41 pagesPS Simulation LabviksoniNo ratings yet
- Power Flow Analysis Using Gauss-Seidel MethodDocument41 pagesPower Flow Analysis Using Gauss-Seidel MethodSasikala SivakumarNo ratings yet
- Pss Manual NewDocument34 pagesPss Manual Newറിജിൽ വി ആർNo ratings yet
- Power System Simulation Lab ManualDocument41 pagesPower System Simulation Lab ManualMary Morse100% (1)
- Ee2404 ManualDocument92 pagesEe2404 ManualsakkuumhNo ratings yet
- Psa Lab Ex - 1Document22 pagesPsa Lab Ex - 1samkousNo ratings yet
- Experiment 1 Computation of Parameters and Modelling of Transmission LinesDocument13 pagesExperiment 1 Computation of Parameters and Modelling of Transmission LinesshimymbNo ratings yet
- Power - System - Lab - EinsteinDocument57 pagesPower - System - Lab - EinsteinAnbalaganNo ratings yet
- EE8711 Power System Simulation Lab ManualDocument162 pagesEE8711 Power System Simulation Lab ManualAbdul YaseenNo ratings yet
- Power System Analysis Lab ManualDocument71 pagesPower System Analysis Lab ManualAnkit Raj SinghNo ratings yet
- EE8711 Power System Simulation Lab ManualDocument155 pagesEE8711 Power System Simulation Lab ManualNagarajan MunusamyNo ratings yet
- Lab Manual NewDocument50 pagesLab Manual NewRahul MeenaNo ratings yet
- EE6711-Power System Simulation LaboratoryDocument157 pagesEE6711-Power System Simulation LaboratoryTushar ChoudharyNo ratings yet
- Power System Simulation Laboratory PDFDocument162 pagesPower System Simulation Laboratory PDFraj selvarajNo ratings yet
- PSS Lab Experiment 1Document7 pagesPSS Lab Experiment 1Soorya Priya Gopala KrishnaNo ratings yet
- EE76 Power System Simulation LabDocument57 pagesEE76 Power System Simulation Labscientistabbas100% (2)
- EX NO : 1 COMPUTATION OF LINE PARAMETERS USING MATLAB / CDocument4 pagesEX NO : 1 COMPUTATION OF LINE PARAMETERS USING MATLAB / CVignesh AadhiNo ratings yet
- Ps Exp 1 PDFDocument6 pagesPs Exp 1 PDFrv_andeNo ratings yet
- Docs EEEPSLNotes2013 PDFDocument46 pagesDocs EEEPSLNotes2013 PDFHtet Mrak AungNo ratings yet
- Caps Lab Manual: Nri Institute of Information Science & Technology Departmet of Electrical & Electronics EngineeringDocument54 pagesCaps Lab Manual: Nri Institute of Information Science & Technology Departmet of Electrical & Electronics EngineeringRakesh KumarNo ratings yet
- Psa ExperimentDocument11 pagesPsa ExperimentHarold de ChavezNo ratings yet
- PSOC ManualDocument24 pagesPSOC ManualIshwari GhuleNo ratings yet
- Dual Band Coupled Line BPF DesignDocument10 pagesDual Band Coupled Line BPF DesignAditya JainNo ratings yet
- EE6711-Power System Simulation Laboratory PDFDocument187 pagesEE6711-Power System Simulation Laboratory PDFவெங்கடேசன் மாரியப்பன்No ratings yet
- Set-A (List of Experiments Is Not Mentioned in RGPV Curriculum) Set-BDocument53 pagesSet-A (List of Experiments Is Not Mentioned in RGPV Curriculum) Set-BSyed Khurshid AlamNo ratings yet
- Line To Line Fault ExperimentsDocument7 pagesLine To Line Fault ExperimentsXian ChaoweNo ratings yet
- Project ReportDocument12 pagesProject ReportRKNo ratings yet
- Pos Neg ZeroDocument5 pagesPos Neg ZerosankalptiwariNo ratings yet
- 1 s2.0 S2215098623001131 MainDocument10 pages1 s2.0 S2215098623001131 MainJaja LocoNo ratings yet
- Calculating parameters of single-phase transmission lineDocument3 pagesCalculating parameters of single-phase transmission linepraveen kumarNo ratings yet
- Comsats University Lab Report Calculates Transmission Line Inductance Using MATLABDocument11 pagesComsats University Lab Report Calculates Transmission Line Inductance Using MATLABMuhammad SohaibNo ratings yet
- Indian Institute of Technology, Bhubaneswar, India School of Electrical Sciences B.Tech, 6 Semester (Power System) Laboratory Experiment No-01Document6 pagesIndian Institute of Technology, Bhubaneswar, India School of Electrical Sciences B.Tech, 6 Semester (Power System) Laboratory Experiment No-01Bhoomika R ReddyNo ratings yet
- Electrical P Roperties Characterization of Algan/Gan Modfet: S. Das, R. K. Nayak, G. N. Dash A. K. PandaDocument9 pagesElectrical P Roperties Characterization of Algan/Gan Modfet: S. Das, R. K. Nayak, G. N. Dash A. K. PandaresearchinventyNo ratings yet
- Study of The Transient Overvoltage Profiles in The Power Distribution Network of Durgapur Steel Plant (DSP)Document6 pagesStudy of The Transient Overvoltage Profiles in The Power Distribution Network of Durgapur Steel Plant (DSP)Parantap RahaNo ratings yet
- Compute RLC Parameters of Radial Copper Cables With Single Screen Based On Conductor and Insulator Characteristics - MATLABDocument8 pagesCompute RLC Parameters of Radial Copper Cables With Single Screen Based On Conductor and Insulator Characteristics - MATLABHai NguyenNo ratings yet
- k1 FCL DigSilentDocument8 pagesk1 FCL DigSilentksg9731No ratings yet
- Design of Dual-Band Bandpass Filter Using Compact Spiral-Shaped Microstrip ResonatorsDocument4 pagesDesign of Dual-Band Bandpass Filter Using Compact Spiral-Shaped Microstrip ResonatorsShrutiAwasthiNo ratings yet
- Experiment-1: AIM Software Required: Matlab 7.6 TheoryDocument2 pagesExperiment-1: AIM Software Required: Matlab 7.6 TheoryVikas VermaNo ratings yet
- Calculating Sequence Line Constants for Transmission LinesDocument5 pagesCalculating Sequence Line Constants for Transmission LinesRafat ThongNo ratings yet
- Transformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationDocument4 pagesTransformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationOscar PieruzziniNo ratings yet
- Lab Sheet 02 - Power LabDocument2 pagesLab Sheet 02 - Power LabSahjadi JahanNo ratings yet
- DS-CDMA Cellular Systems Performance With Base Station Assignment, Power Control Error and Beamforming Over Multipath FadingDocument18 pagesDS-CDMA Cellular Systems Performance With Base Station Assignment, Power Control Error and Beamforming Over Multipath FadingAIRCC - IJCNCNo ratings yet
- Power Systems IIDocument46 pagesPower Systems IIBabu FriendNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Enabling Technologies for High Spectral-efficiency Coherent Optical Communication NetworksFrom EverandEnabling Technologies for High Spectral-efficiency Coherent Optical Communication NetworksNo ratings yet
- Machine Learning and Deep Learning - Fundamentals and ApplicationsDocument2 pagesMachine Learning and Deep Learning - Fundamentals and ApplicationsPrasenjit DeyNo ratings yet
- Self-Healing Bio-Concrete Overview Importance and LimitationsDocument6 pagesSelf-Healing Bio-Concrete Overview Importance and LimitationsPrasenjit DeyNo ratings yet
- Assignment (Electric Power Utilization EE16105)Document4 pagesAssignment (Electric Power Utilization EE16105)Prasenjit DeyNo ratings yet
- Assignment IIDocument2 pagesAssignment IIPrasenjit DeyNo ratings yet
- Noc18 Ee16 Assignment3Document4 pagesNoc18 Ee16 Assignment3Prasenjit DeyNo ratings yet
- Assignment IDocument5 pagesAssignment IPrasenjit DeyNo ratings yet
- Assignment 11 SolutionDocument6 pagesAssignment 11 SolutionPrasenjit DeyNo ratings yet
- Impedance Measurement of Traction Network and Electric Train For Stability Analysis in High Speed RailwaysDocument15 pagesImpedance Measurement of Traction Network and Electric Train For Stability Analysis in High Speed RailwaysPrasenjit DeyNo ratings yet
- Unit 1 - How To Access The Portal: Assignment0Document4 pagesUnit 1 - How To Access The Portal: Assignment0Prasenjit DeyNo ratings yet
- Assignment-I (Power System Stability and Control EE16103)Document2 pagesAssignment-I (Power System Stability and Control EE16103)Prasenjit Dey50% (2)
- Assignment IIIDocument2 pagesAssignment IIIPrasenjit DeyNo ratings yet
- Assignment-Iv: (I) Operating Time of Feeder RelayDocument4 pagesAssignment-Iv: (I) Operating Time of Feeder RelayPrasenjit Dey100% (1)
- Insulation Coordination PDFDocument14 pagesInsulation Coordination PDFPrasenjit DeyNo ratings yet
- Protection of AC Generator and Motors PDFDocument25 pagesProtection of AC Generator and Motors PDFPrasenjit DeyNo ratings yet
- Lab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT KanpurDocument95 pagesLab Manual For EE380 (Control Lab) : Department of Electrical Engineering, IIT Kanpurrakheep123No ratings yet
- Insulation Coordination and Transformer Protection PDFDocument19 pagesInsulation Coordination and Transformer Protection PDFPrasenjit DeyNo ratings yet
- Choudhary 2015Document7 pagesChoudhary 2015Prasenjit DeyNo ratings yet
- Small-Signal Stability Enhancement of Multimachine Power System Using Bio-Inspired AlgorithmsDocument6 pagesSmall-Signal Stability Enhancement of Multimachine Power System Using Bio-Inspired AlgorithmsPrasenjit DeyNo ratings yet
- Message of Dr. Abdul Kalam For Each IndianDocument11 pagesMessage of Dr. Abdul Kalam For Each IndianRaja RavivarmanNo ratings yet
- Ee431 Power Systems Lab: IV Year B.Tech. EEE I - Semester L T PTO CDocument1 pageEe431 Power Systems Lab: IV Year B.Tech. EEE I - Semester L T PTO CPrasenjit DeyNo ratings yet
- Ac Motors EbookDocument74 pagesAc Motors EbookHammad MalikNo ratings yet
- Online Tuning of Power System Stabilizers Using Fuzzy Logic Network With Fuzzy Cmeans Clustering 2332 0796 1000136Document9 pagesOnline Tuning of Power System Stabilizers Using Fuzzy Logic Network With Fuzzy Cmeans Clustering 2332 0796 1000136Prasenjit DeyNo ratings yet
- Adaptive Control and Parameter Identification of A Doublyfed Induction Generator For Wind PowerDocument103 pagesAdaptive Control and Parameter Identification of A Doublyfed Induction Generator For Wind PowerPrasenjit Dey100% (3)
- Advantages of HVDCDocument17 pagesAdvantages of HVDC1balamanianNo ratings yet
- Design and Analysis of An Adaptive Fuzzy Power System StabilizerDocument7 pagesDesign and Analysis of An Adaptive Fuzzy Power System StabilizerPrasenjit DeyNo ratings yet
- Ac Motors EbookDocument74 pagesAc Motors EbookHammad MalikNo ratings yet
- Advantages of HVDCDocument17 pagesAdvantages of HVDC1balamanianNo ratings yet
- Chapter 8 (3-Phase AC Circuits)Document47 pagesChapter 8 (3-Phase AC Circuits)Conde RomelNo ratings yet
- Cop e 2015Document356 pagesCop e 2015ZiyadDohaNo ratings yet
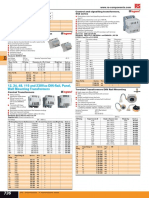
- Transformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersDocument1 pageTransformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersЛеха ЯнчукNo ratings yet
- 6121 Gen T. de Leon Valenzuela City: St. Bernadette College of ValenzuelaDocument22 pages6121 Gen T. de Leon Valenzuela City: St. Bernadette College of ValenzuelaMaryGrace OrpillaNo ratings yet
- Bst100 User ManualDocument27 pagesBst100 User Manualpepsi_bozic100% (1)
- Comparison of Various Converter Topologies For HEV ApplicationsDocument2 pagesComparison of Various Converter Topologies For HEV ApplicationsJyothi VenuNo ratings yet
- Ericsson Universal Cable EngDocument1 pageEricsson Universal Cable EngMuhammad Afrizal HidayatNo ratings yet
- Manual Variador Mitsubishi U100Document90 pagesManual Variador Mitsubishi U100inutaisho112100% (1)
- Honeywell 65-0289Document12 pagesHoneywell 65-0289RobertoandeliNo ratings yet
- Module 1 Question BankDocument1 pageModule 1 Question BankAbcNo ratings yet
- Gibilisco QaDocument22 pagesGibilisco QaJomarCalacagNo ratings yet
- Electrical Power Lab Session 03 Soil Resistivity & Earthing ResistanceDocument8 pagesElectrical Power Lab Session 03 Soil Resistivity & Earthing ResistanceHermain Fayyaz KarimNo ratings yet
- Frequency Inverters Option Units Installation GuideDocument0 pagesFrequency Inverters Option Units Installation GuideAlex ChavezNo ratings yet
- Generation Scheduling in Power Systems OptimizationDocument29 pagesGeneration Scheduling in Power Systems OptimizationImma TzNo ratings yet
- 7TCA083750R0019 sk040Document2 pages7TCA083750R0019 sk040Jalal AlbadriNo ratings yet
- Rat DatasheetDocument3 pagesRat DatasheetEugy AlexNo ratings yet
- 5ik40gn AulDocument5 pages5ik40gn Aulluis_h_t_79No ratings yet
- Report On Performance of State Power Utilities 2018 19 PDFDocument198 pagesReport On Performance of State Power Utilities 2018 19 PDFabhi_iitrNo ratings yet
- Analog signal converters selection guideDocument20 pagesAnalog signal converters selection guideHummac MagañaNo ratings yet
- Implementation and Validation of The Nordic Test System in Digsilent PowerfactoryDocument6 pagesImplementation and Validation of The Nordic Test System in Digsilent PowerfactoryDiego J. AlverniaNo ratings yet
- Socomec Diris BrochureDocument6 pagesSocomec Diris Brochureمسلم البرغوثيNo ratings yet
- UNDP PV BookletDocument20 pagesUNDP PV BookletZeina RammalNo ratings yet
- Wind Energy Presentation - RevisedDocument18 pagesWind Energy Presentation - Revisedapi-267054444No ratings yet
- Statistical Digest 2018: Ceylon Electricity BoardDocument12 pagesStatistical Digest 2018: Ceylon Electricity BoardMithila GunawardenaNo ratings yet