You might also like
- A 3 Suspension AvantDocument6 pagesA 3 Suspension AvantjuanlestonNo ratings yet
- Application Du PTVDocument22 pagesApplication Du PTVBeny AbdouNo ratings yet
- MMCDocument484 pagesMMCMarouane KhoukhNo ratings yet
- Module: Elasticité TD N°3 1 Année MasterDocument2 pagesModule: Elasticité TD N°3 1 Année Mastersamir ghebouliNo ratings yet
- CSPlas 2Document16 pagesCSPlas 2KangamaNo ratings yet
- TD 2Document2 pagesTD 2imade zidaneNo ratings yet
- Travail Des Métaux en FeuilleDocument24 pagesTravail Des Métaux en FeuilleLionel EtienneNo ratings yet
- ChaptIV Plasticité 2 3D Mars Avril E 2020 29avril2020 FinaleDocument23 pagesChaptIV Plasticité 2 3D Mars Avril E 2020 29avril2020 Finaleramzi abidiNo ratings yet
- (Analyse) Etau de Fraiseuse - e JMDocument3 pages(Analyse) Etau de Fraiseuse - e JMmarouf aek100% (3)
- Examens Regroupés de Mécanique Des MatériauxDocument29 pagesExamens Regroupés de Mécanique Des MatériauxAmeniYaichNo ratings yet
- Aaa RMChap6 (Torsion) ExSup PDFDocument5 pagesAaa RMChap6 (Torsion) ExSup PDFTriki BilelNo ratings yet
- InertieDocument49 pagesInertieC.E.B.I MAROCNo ratings yet
- Chapitre 5 Théories Des États de Contraintes LimitesDocument10 pagesChapitre 5 Théories Des États de Contraintes LimitesRose Eva100% (1)
- Examen TP 2013-2014Document12 pagesExamen TP 2013-2014Wassim Ben SalahNo ratings yet
- Resistance Des MateriauxDocument8 pagesResistance Des MateriauxMOUSAVOU MORVANENo ratings yet
- Elasticité Chap1 2019 2020 PDFDocument32 pagesElasticité Chap1 2019 2020 PDFsara marrokNo ratings yet
- RDM Avancé ?Document15 pagesRDM Avancé ?Rim NbNo ratings yet
- Cisaillement 2 Bac Science DingenieurDocument5 pagesCisaillement 2 Bac Science Dingenieuryassine22No ratings yet
- CH 7 Le FllambementDocument22 pagesCH 7 Le FllambementMery20000100% (1)
- TP5 FlambementDocument13 pagesTP5 FlambementSimo Rd0% (1)
- MQ41 - TP2, Etude Du Flambement PDFDocument18 pagesMQ41 - TP2, Etude Du Flambement PDFAhcene Belka-çemNo ratings yet
- App 107 03 EnonceDocument3 pagesApp 107 03 EnonceMeryem EL ADEKNo ratings yet
- TP 3 Groupe 2Document10 pagesTP 3 Groupe 2Chipou NourdineNo ratings yet
- RectificationDocument18 pagesRectificationSehili Mohamed houssemNo ratings yet
- Tenseur Des Contraintes PDFDocument42 pagesTenseur Des Contraintes PDFRamiro VillaNo ratings yet
- Application+Flexions+10 11Document2 pagesApplication+Flexions+10 11ntayoubNo ratings yet
- Chapitre 4 PDFDocument9 pagesChapitre 4 PDFRami ZekriNo ratings yet
- Serie TD 1 L3GC 2020Document5 pagesSerie TD 1 L3GC 2020Moussa Faye100% (1)
- MQ41 - TP1, Ansys, Poutre en Flexion, CisaillementDocument13 pagesMQ41 - TP1, Ansys, Poutre en Flexion, CisaillementkoulliredouaneNo ratings yet
- Effort Dans Les Plaques PDFDocument11 pagesEffort Dans Les Plaques PDFchouidiNo ratings yet
- TP MDF (BMZ)Document17 pagesTP MDF (BMZ)Zakii MNo ratings yet
- Chap 4 RDM 1Document15 pagesChap 4 RDM 1ALIOUI ABDELHADI100% (1)
- RDM!!Document20 pagesRDM!!raissealhokomaNo ratings yet
- TP 3 - Etude de La Flexion A 3 PointsDocument6 pagesTP 3 - Etude de La Flexion A 3 PointsPrivat ZouobaNo ratings yet
- Cours MMC-chap1Document8 pagesCours MMC-chap1Ikram BelNo ratings yet
- Etude de La Conjonction Poutre PlaqueDocument137 pagesEtude de La Conjonction Poutre PlaqueHammam KalouchNo ratings yet
- PlasticitéDocument6 pagesPlasticitéHamidNo ratings yet
- RDM2Document153 pagesRDM2Amine Dhiba100% (1)
- AI Bap C Assist Fabric Mécanique 148Document13 pagesAI Bap C Assist Fabric Mécanique 148Donald TeyouNo ratings yet
- Résistance Au CisaillementDocument51 pagesRésistance Au CisaillementBerthe MohamedNo ratings yet
- 3st Ds3 Dt1 Systeme de Fabrication Des Gateaux FourresDocument4 pages3st Ds3 Dt1 Systeme de Fabrication Des Gateaux FourresHazem ardhaouiNo ratings yet
- AnnalesElasticité 2017 2020Document62 pagesAnnalesElasticité 2017 2020Ishak BendounanNo ratings yet
- Exercices Calcul VectorielDocument6 pagesExercices Calcul VectorielBrahim MouhcineNo ratings yet
- TD4 Méthodes Des ÉlémentsDocument2 pagesTD4 Méthodes Des ÉlémentsAMENI NEDJADINo ratings yet
- Chapitre 6 Cisaillement Simple RDM1!17!04 11Document9 pagesChapitre 6 Cisaillement Simple RDM1!17!04 11Ali Djidi HemchimiNo ratings yet
- 06 Flexion Des Poutres DroitesDocument34 pages06 Flexion Des Poutres DroitesMed Amine Amri100% (1)
- Serge Laroze - Tome 5. Poutres. Exercices (2005) - 011436Document232 pagesSerge Laroze - Tome 5. Poutres. Exercices (2005) - 011436Walid MahmoudiNo ratings yet
- Serie D'exercices N°2Document2 pagesSerie D'exercices N°2Deghboudj SamirNo ratings yet
- 2022 2023 TD1 Methode Des Elements Finis IEM2S3 IGC2S3Document10 pages2022 2023 TD1 Methode Des Elements Finis IEM2S3 IGC2S3Thamar GomaNo ratings yet
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceFrom EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNo ratings yet
- 01 TatiDocument7 pages01 TatiBeny AbdouNo ratings yet
- PLAQUE Et COQUE PDFDocument7 pagesPLAQUE Et COQUE PDFBeki Dabalambi80% (5)
- Methode NumeriqueDocument14 pagesMethode NumeriqueMichelSagnoNo ratings yet
- Post Flambment Panneau CompositeDocument16 pagesPost Flambment Panneau CompositeDali Ben ChagraNo ratings yet
- 2 Sem 2014Document19 pages2 Sem 2014Legouirah MariaNo ratings yet
- Chapitre 5 Élément PlaqueDocument31 pagesChapitre 5 Élément PlaqueMohamed ZaharNo ratings yet
- Plaques Et CoquesDocument2 pagesPlaques Et CoquesshiraNo ratings yet
- Analyse Du Comportement de Flambage Des Plaques MiDocument8 pagesAnalyse Du Comportement de Flambage Des Plaques Mikzi itaNo ratings yet
- Plaques 2009 Rac1Document86 pagesPlaques 2009 Rac1kursley143100% (1)
- Les singularités comme limites ontologiques de la relativité généraleFrom EverandLes singularités comme limites ontologiques de la relativité généraleNo ratings yet
- Reglement Parasismiques Algerien V2003Document101 pagesReglement Parasismiques Algerien V2003Amine Djerroufi100% (1)
- Thesis Thèse MASRI Tahar 2018 MecaniqueDocument170 pagesThesis Thèse MASRI Tahar 2018 MecaniqueHako KhechaiNo ratings yet
- Algerian RPA99 Confined MasonryDocument14 pagesAlgerian RPA99 Confined MasonryMimi SeguiniNo ratings yet
- Analyse Pushover Des Portiques en Béton Armé À Premier Niveau Souple Par Un Modèle de Rotule en FibresDocument6 pagesAnalyse Pushover Des Portiques en Béton Armé À Premier Niveau Souple Par Un Modèle de Rotule en FibresHako KhechaiNo ratings yet
- Cours PLANCHER Procedes Generaux de ConstructionDocument20 pagesCours PLANCHER Procedes Generaux de ConstructionSayf Golchif83% (6)
- Resistance Des Materiaux Cours Et Exercices CorrigesDocument186 pagesResistance Des Materiaux Cours Et Exercices CorrigesAbdelkbir Saouti95% (64)
- 02 RDM Traction Exercices CorrigeDocument2 pages02 RDM Traction Exercices CorrigeNaoufel BousninaNo ratings yet
- TD Arch L3 Structure02Document11 pagesTD Arch L3 Structure02Hako KhechaiNo ratings yet
- 02 RDM Traction Exercices CorrigeDocument2 pages02 RDM Traction Exercices CorrigeNaoufel BousninaNo ratings yet
- 02 02 Dalles PleinesDocument26 pages02 02 Dalles Pleinesbronzol92% (51)
- Introduction À L'analyse NumériqueDocument264 pagesIntroduction À L'analyse NumériqueJose Carlos Vaz Carneiro100% (1)
- TD Cours Actions Meca v4Document2 pagesTD Cours Actions Meca v4Hako KhechaiNo ratings yet
- Poutres TDocument8 pagesPoutres Tforumnaute100% (1)
- TALEB R. - CGS - JPOGC - 08 - Calcul Des Structures Selon Le RPA 2003Document31 pagesTALEB R. - CGS - JPOGC - 08 - Calcul Des Structures Selon Le RPA 2003rabah100% (6)
- 8 Avril PDFDocument16 pages8 Avril PDFHako Khechai0% (1)
- Fondations Superficielles1 Alain Meilhac Et Alain BURONDocument11 pagesFondations Superficielles1 Alain Meilhac Et Alain BURONAntonio MorenoNo ratings yet
- Flexion Transversale-2017Document78 pagesFlexion Transversale-2017Andreas RagusNo ratings yet
- Fiche Chantier 09 - GuadeloupeDocument4 pagesFiche Chantier 09 - GuadeloupeHako KhechaiNo ratings yet
- 8 Avril PDFDocument16 pages8 Avril PDFHako Khechai0% (1)
- These Guillaume Lebas 11032013Document218 pagesThese Guillaume Lebas 11032013Hako KhechaiNo ratings yet
- Étude D'un Bâtiment R+10 A Usage D'habitation Et Commerce Contreventé Par Un Système Mixte Voile-Portique PDFDocument253 pagesÉtude D'un Bâtiment R+10 A Usage D'habitation Et Commerce Contreventé Par Un Système Mixte Voile-Portique PDFNassim Riad100% (1)
- BatataDocument26 pagesBatataHichemNo ratings yet
- Chapitre IDocument6 pagesChapitre IWassimRahmouniNo ratings yet
- Chapitre IDocument9 pagesChapitre IWassimRahmouniNo ratings yet
- BatataDocument26 pagesBatataHichemNo ratings yet
- Chapitre IDocument6 pagesChapitre IWassimRahmouniNo ratings yet
- Introduction À La Méthode Des Éléments Finis - KERN MichelDocument68 pagesIntroduction À La Méthode Des Éléments Finis - KERN Michelanahimc100% (2)
- Chapitre IDocument9 pagesChapitre IWassimRahmouniNo ratings yet
- Ondes Dans Les Matériaux Micro-StructurésDocument43 pagesOndes Dans Les Matériaux Micro-StructurésHako KhechaiNo ratings yet
- Position Neutre Filtre Avec HauteDocument14 pagesPosition Neutre Filtre Avec HauteLiebherrNo ratings yet
- Mgv25 Gamme: Installation, Utilisation Et Entretien GearlessDocument36 pagesMgv25 Gamme: Installation, Utilisation Et Entretien GearlessJaouad LahdarNo ratings yet
- CPT - 3537-2 Panneaux Isolants Non Porteurs SupportsDocument26 pagesCPT - 3537-2 Panneaux Isolants Non Porteurs SupportslauNo ratings yet
- Cours Caisson de MelangeDocument5 pagesCours Caisson de Melangeaidoudi walidNo ratings yet
- Plans PIIDocument4 pagesPlans PIINasr EddineNo ratings yet
- Chapter 30fr Isgintt 062010Document6 pagesChapter 30fr Isgintt 062010Franco FashionNo ratings yet
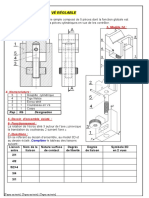
- Vé Réglable 2021Document4 pagesVé Réglable 2021hamrouniNo ratings yet
- Pages de Livre-PHYSIQMINALE - SDocument5 pagesPages de Livre-PHYSIQMINALE - SHamza DickoNo ratings yet
- Présentation de La Raffinerie de SkikdaDocument6 pagesPrésentation de La Raffinerie de SkikdaMohamed Hachelfi100% (1)
- 1991th Boucly-Norotte V Ns16259Document237 pages1991th Boucly-Norotte V Ns16259King of pumpNo ratings yet
- Note Dinformation Opa Visant Les Actions de Ciments Du MarocDocument438 pagesNote Dinformation Opa Visant Les Actions de Ciments Du MarocZakaria ZikouNo ratings yet
- Lombardini LGA 226 IT FR EN DE ES PTDocument64 pagesLombardini LGA 226 IT FR EN DE ES PTModesto Olmedo RamirezNo ratings yet
- Protection de La Tête - SoudageDocument6 pagesProtection de La Tête - SoudageJohakim974No ratings yet
- Dossier Élève Sujet 1 2008Document5 pagesDossier Élève Sujet 1 2008Ludo MaletNo ratings yet
- Chapitre 2 2Document24 pagesChapitre 2 2Slimen Ben AmorNo ratings yet
- Sujets de Concours Physique Et Chimie 2011Document24 pagesSujets de Concours Physique Et Chimie 2011Yasser Dahbi100% (1)
- Delebok Compact 10N - 2632E Etter Desember 2004 PDFDocument171 pagesDelebok Compact 10N - 2632E Etter Desember 2004 PDFMuamer ZahirovicNo ratings yet
- Sujet MathDocument9 pagesSujet MathAbdelilah El GmairiNo ratings yet
- Résumé RLC ForcéDocument5 pagesRésumé RLC ForcéBilel Ameur100% (3)
- Fiche 1Document2 pagesFiche 1Anis SouissiNo ratings yet
- Une 4L Bien PréparéeDocument15 pagesUne 4L Bien Préparéedeepsky88____dNo ratings yet
- Cours Ouvrages Hydrauliques-10Document10 pagesCours Ouvrages Hydrauliques-10Issam ElmaaniNo ratings yet
- Principes de Conception Hygiénique: Troisième Édition, Mars 2018Document13 pagesPrincipes de Conception Hygiénique: Troisième Édition, Mars 2018Yassmine YasminaNo ratings yet
- Cours ManagementDocument53 pagesCours ManagementMohamed YazidNo ratings yet
- Chap11 Durée Vitesse DébitDocument2 pagesChap11 Durée Vitesse Débitnaababaongo052No ratings yet
- 6187 FRDocument42 pages6187 FRHOHINo ratings yet
- COURS - Analyse Fonctionnelle - PR - CopieDocument11 pagesCOURS - Analyse Fonctionnelle - PR - CopieBouchra Bourass100% (1)
- TurboDocument17 pagesTurboعبد الحليم رغدةNo ratings yet
- 5 TP Semestre 2 2021Document5 pages5 TP Semestre 2 2021Christophe AnthoineNo ratings yet
- (E5) TD CorrectionDocument12 pages(E5) TD Correctionchkwh99sk8No ratings yet