You might also like
- Guia para El Uso de La Estacion TotalDocument5 pagesGuia para El Uso de La Estacion TotalCamila LunaNo ratings yet
- Curso Autocad 2007 Nivel 1-4 Sistema X-Y PuntosDocument295 pagesCurso Autocad 2007 Nivel 1-4 Sistema X-Y PuntosThomas VercettiNo ratings yet
- Informe de Curva VerticalDocument17 pagesInforme de Curva Verticalfrank1102No ratings yet
- Diseño Geometrico de Vias TerrestresDocument15 pagesDiseño Geometrico de Vias TerrestresmganviniNo ratings yet
- Dilucion de La PrecisiónDocument3 pagesDilucion de La PrecisiónJuan Alexandro Fernandez TantaleanNo ratings yet
- Berma Civil 3dDocument3 pagesBerma Civil 3dVitto Gutierrez FrancoNo ratings yet
- Error Cuadratico MedioDocument6 pagesError Cuadratico Mediojaiflo7503No ratings yet
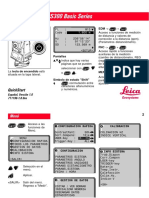
- Guia Basica Sr530Document15 pagesGuia Basica Sr530Pedro José Cruz GuevaraNo ratings yet
- Memoria TopograficaDocument11 pagesMemoria TopograficaRodrigo EnriquezNo ratings yet
- Como Descargar Imágenes Spot de 2.5 M de Resolución EspacialDocument3 pagesComo Descargar Imágenes Spot de 2.5 M de Resolución EspacialEdgar Roque Gutierrez SalinasNo ratings yet
- Tutorial de Global MapperDocument14 pagesTutorial de Global Mapperbasse123No ratings yet
- Manual Español Estacion Total FlexLine TS02!06!09Document152 pagesManual Español Estacion Total FlexLine TS02!06!09Juan HF100% (1)
- Contrato de Mantenimiento CCP (Firmware y Software)Document7 pagesContrato de Mantenimiento CCP (Firmware y Software)Jean Piere Guevara VasquezNo ratings yet
- Curso fotogrametría Pix4DDocument15 pagesCurso fotogrametría Pix4DRodolfo Manuel Ortiz LopezNo ratings yet
- Receptor GRX1 ManualDocument57 pagesReceptor GRX1 ManualGeny Alberto Argueta RuizNo ratings yet
- Instalacion Programa Vias para AutocadDocument8 pagesInstalacion Programa Vias para AutocadRicardo MonzonNo ratings yet
- Proyecciones cartográficas BoliviaDocument14 pagesProyecciones cartográficas BoliviaKevin Ramirez Urcullo100% (1)
- Posicionamiento Por Punto Preciso PPP para Estaciones Continuas GlobalesDocument22 pagesPosicionamiento Por Punto Preciso PPP para Estaciones Continuas GlobalesJONATHAN RODRIGO CASTRO ORTIZNo ratings yet
- Posicionamiento absolutoDocument9 pagesPosicionamiento absolutoMaría MolinaNo ratings yet
- CONFIGURACIÓN TRIMBLE 5700 COMO ROVER RTKDocument23 pagesCONFIGURACIÓN TRIMBLE 5700 COMO ROVER RTKFredy Arciniegas RamirezNo ratings yet
- Altimetria SatelitalDocument80 pagesAltimetria SatelitalAldryn LealNo ratings yet
- Configuración receptor geodésico método estáticoDocument6 pagesConfiguración receptor geodésico método estáticojunior alejandro roque sanchezNo ratings yet
- Manual Estacion Total 307Document6 pagesManual Estacion Total 307Ramiro EkNo ratings yet
- Cartografia Basada en SIRGASDocument24 pagesCartografia Basada en SIRGASHugo José Luque NeiraNo ratings yet
- SKIPro 3 0es PDFDocument76 pagesSKIPro 3 0es PDFArturo FuentesNo ratings yet
- Map 3D - 2011Document89 pagesMap 3D - 2011Anonymous 7YfwqXvNo ratings yet
- Manual Gps HiperDocument32 pagesManual Gps HiperAriel UrietaNo ratings yet
- Pautas para La Presentación de Amarres Horizontales y Verticales. NORMAS GEODESIA MEDELLÍN 2014Document2 pagesPautas para La Presentación de Amarres Horizontales y Verticales. NORMAS GEODESIA MEDELLÍN 2014Amador CalleNo ratings yet
- Analisis GeoestadisticoDocument34 pagesAnalisis GeoestadisticoJosue DamascoNo ratings yet
- Topcon GNSS Hiper V Levantamiento RTK Magnet Field v.2.7.1Document8 pagesTopcon GNSS Hiper V Levantamiento RTK Magnet Field v.2.7.1jar rriiNo ratings yet
- Plataformas y SensoresDocument94 pagesPlataformas y SensoresJorgeCubas100% (1)
- Ecuaciones de PosicionamientoDocument18 pagesEcuaciones de PosicionamientoMauricio Fernando Tobar RogelNo ratings yet
- Taller Proyección Transversa Modificada EjidalDocument132 pagesTaller Proyección Transversa Modificada EjidalSolNo ratings yet
- Guia Basica Avance Tps&Gps 1200 v5 - 0 - EsDocument61 pagesGuia Basica Avance Tps&Gps 1200 v5 - 0 - EsJose María Jiménez ÁlvarezNo ratings yet
- Configuración GNSS estáticoDocument12 pagesConfiguración GNSS estáticoRafael AlvarezNo ratings yet
- Análisis GeomorfométricoDocument55 pagesAnálisis GeomorfométricoJonathan Villar VásquezNo ratings yet
- Leica Geo Office Tools EspañolDocument6 pagesLeica Geo Office Tools EspañolAlexis100% (1)
- Lidar permite levantamientos topográficos rápidos y exactosDocument4 pagesLidar permite levantamientos topográficos rápidos y exactosCristian Segura BidermannNo ratings yet
- Levantamientos TaquiemetricosDocument16 pagesLevantamientos TaquiemetricosRaul Blas TelloNo ratings yet
- Practica Lev Estatico GNSSDocument7 pagesPractica Lev Estatico GNSSYahira Gutierrez MoraNo ratings yet
- Ebee X ESDocument5 pagesEbee X ESMiguel Mota100% (1)
- Guía rápida exportación datos Leica TS06Document1 pageGuía rápida exportación datos Leica TS06Randy Mucha V.100% (1)
- Herramientas para La ProductividadDocument20 pagesHerramientas para La ProductividadDavid Barrero OchoaNo ratings yet
- Alonso Sarría, F. - Cómo Hacer Mapas Con GMTDocument49 pagesAlonso Sarría, F. - Cómo Hacer Mapas Con GMTlocometrallaNo ratings yet
- Introducción de Verificación y Validación Del SoftwareDocument4 pagesIntroducción de Verificación y Validación Del SoftwareBoris IbsenNo ratings yet
- Guia FRAG Trazado de Curvas A NivelDocument12 pagesGuia FRAG Trazado de Curvas A NivelHumberto Vallecillo KühlNo ratings yet
- Módulo 2 PDFDocument41 pagesMódulo 2 PDFFabian Madrigal ArtunduagaNo ratings yet
- Modelo Digital Del TerrenoDocument3 pagesModelo Digital Del TerrenoJulian AndresNo ratings yet
- Control de Maquinaria Con Tecnologia GpsDocument23 pagesControl de Maquinaria Con Tecnologia GpsGZ Oliver100% (1)
- Grupo 6 - Sistemas de Posicionamiento y Navegacion.... Sistemas de CoordenadasDocument19 pagesGrupo 6 - Sistemas de Posicionamiento y Navegacion.... Sistemas de CoordenadasAlejandro GarciaNo ratings yet
- Practica 7Document13 pagesPractica 7P Herminio SabinoNo ratings yet
- Practica 7Document13 pagesPractica 7P Herminio SabinoNo ratings yet
- Topografía GpsDocument39 pagesTopografía GpsLuis Miguel Peña ValeroNo ratings yet
- Sistema de Posicionamiento GlobalDocument8 pagesSistema de Posicionamiento GlobalArlan Sanchez MontenegroNo ratings yet
- "Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaDocument5 pages"Año de La Lucha Contra La Corrupción E Impunidad " Universidad Nacional de San Martín Facultad de Ciencias Agrarias Escuela Profesional de AgronomíaAngel Gabriel López CamposNo ratings yet
- Sistema de Posicionamiento Global (GPS) PDFDocument14 pagesSistema de Posicionamiento Global (GPS) PDFJEDUZOR OrozcoNo ratings yet
- Marco TeoricoDocument8 pagesMarco TeoricoValentino RickyNo ratings yet
- Sistema de Posicionamiento Global - Wikipedia, La Enciclopedia LibreDocument10 pagesSistema de Posicionamiento Global - Wikipedia, La Enciclopedia LibreEdgar BolivarNo ratings yet
- GPS y sistemas de coordenadas para geodesiaDocument14 pagesGPS y sistemas de coordenadas para geodesiaGuzman JoseNo ratings yet
- Modal identification using smart mobile sensing unitsFrom EverandModal identification using smart mobile sensing unitsNo ratings yet
- Protocolo RTP: transporte de audio y video en tiempo realDocument11 pagesProtocolo RTP: transporte de audio y video en tiempo realJoel ValdiviesoNo ratings yet
- Registro DesplazamientoDocument3 pagesRegistro DesplazamientoJoel ValdiviesoNo ratings yet
- Avances en Tecnologias de Comunicaciones InalambricasDocument5 pagesAvances en Tecnologias de Comunicaciones InalambricasJoel ValdiviesoNo ratings yet
- Analisis Comparativo de Programas de RadioDocument2 pagesAnalisis Comparativo de Programas de RadioJoel ValdiviesoNo ratings yet
- SDHDocument4 pagesSDHJoel ValdiviesoNo ratings yet
- Iot - EcuadorDocument3 pagesIot - EcuadorJoel Valdivieso50% (2)
- Análisis Sobre El SonidoDocument2 pagesAnálisis Sobre El SonidoJoel ValdiviesoNo ratings yet
- Sistema de Control de Humedad Mediante La Tecnologia Zigbee ExpoDocument2 pagesSistema de Control de Humedad Mediante La Tecnologia Zigbee ExpoJoel ValdiviesoNo ratings yet
- La RayuelaDocument5 pagesLa RayuelaJoel ValdiviesoNo ratings yet
- Análisis Sobre El SonidoDocument2 pagesAnálisis Sobre El SonidoJoel ValdiviesoNo ratings yet
- Análisis Sobre El SonidoDocument2 pagesAnálisis Sobre El SonidoJoel ValdiviesoNo ratings yet
- La RayuelaDocument5 pagesLa RayuelaJoel ValdiviesoNo ratings yet
- Arquitectura SNMP v3Document1 pageArquitectura SNMP v3Joel ValdiviesoNo ratings yet
- Cert CsirtDocument17 pagesCert CsirtJoel ValdiviesoNo ratings yet
- Politicas de Seguridad RO KP SA CVDocument4 pagesPoliticas de Seguridad RO KP SA CVJoel ValdiviesoNo ratings yet
- Cloud Vs VirtualizaciónDocument5 pagesCloud Vs VirtualizaciónJoel ValdiviesoNo ratings yet
- X25. Frame Relay y ATMDocument10 pagesX25. Frame Relay y ATMjuanjito2211No ratings yet
- Transmision y RecepcionDocument40 pagesTransmision y RecepcionJUANK VILLANo ratings yet
- Manual de Ubiquiti airMAX WebinarDocument67 pagesManual de Ubiquiti airMAX WebinarAntonio Edmundo Martinez AndradeNo ratings yet
- ST640Document2 pagesST640AARON TORRESNo ratings yet
- Curso Señales y SistemasDocument24 pagesCurso Señales y Sistemassoftgit softwareNo ratings yet
- EXPERIENCIA7PALOMINOSYSLABDocument6 pagesEXPERIENCIA7PALOMINOSYSLABJohn PalominoNo ratings yet
- Código HDB3 en MatlabDocument2 pagesCódigo HDB3 en MatlabRo Dri GoNo ratings yet
- COTIZACIÓN #G001 - 0021178: ( ) El Codigo de Pago Es Su Numero de NitDocument6 pagesCOTIZACIÓN #G001 - 0021178: ( ) El Codigo de Pago Es Su Numero de NitDavid Hugo Urzagaste GuzmanNo ratings yet
- AntenasDocument70 pagesAntenasAlejandra CardenasNo ratings yet
- Guía rápida de la consola digital DHD RM2200DDocument19 pagesGuía rápida de la consola digital DHD RM2200DandreslazarilloNo ratings yet
- Área EfectivaDocument7 pagesÁrea EfectivaMario Sernaque RumicheNo ratings yet
- Qué Es XDLSDocument6 pagesQué Es XDLSJossmilNo ratings yet
- HARWARE DE UN DISPOSITIVO CELULAR (Prof. César Acuna)Document5 pagesHARWARE DE UN DISPOSITIVO CELULAR (Prof. César Acuna)Alejandro MarinNo ratings yet
- Eltako PVP 2018 Es EanDocument10 pagesEltako PVP 2018 Es EanVEMATELNo ratings yet
- Ud04 SCADocument58 pagesUd04 SCAjuantmv1234567890No ratings yet
- Carkit 034Document6 pagesCarkit 034MatamorosNo ratings yet
- Planificación de Radioenlaces para VozDocument38 pagesPlanificación de Radioenlaces para VozZLorena Monzón DurandNo ratings yet
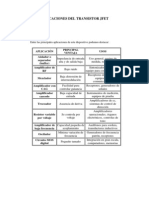
- APLICACIONES JFETDocument3 pagesAPLICACIONES JFETAgusto Valedes83% (6)
- Manual dLAN 550 WiFi EsDocument47 pagesManual dLAN 550 WiFi EsCRISTINANo ratings yet
- CP Servicio Movistar FusionDocument32 pagesCP Servicio Movistar FusionAnton AntonNo ratings yet
- Simulador FI PromaxDocument2 pagesSimulador FI PromaxSergio DiazNo ratings yet
- Señales y Procesos EstocásticosDocument171 pagesSeñales y Procesos Estocásticosfr4nkkiNo ratings yet
- Introduccion A La Teoría Del Procesamiento Digital de Señales de AudioDocument40 pagesIntroduccion A La Teoría Del Procesamiento Digital de Señales de AudiofrankNo ratings yet
- PTAR 1010 - F Tarifa FTTH - Cumaral, Tabio, Tenjo y Sibaté V1Document12 pagesPTAR 1010 - F Tarifa FTTH - Cumaral, Tabio, Tenjo y Sibaté V1Jorge WebNo ratings yet
- Manejo WFM7120-ESP1v0 ImpDocument76 pagesManejo WFM7120-ESP1v0 ImpJuanNo ratings yet
- Arreglo de AntenaDocument8 pagesArreglo de AntenaNestor Alexander Brito100% (2)
- Amplificador audio TDA2616QDocument4 pagesAmplificador audio TDA2616QOSCAR IVAN TENGONÓ CASAS100% (1)
- Iamsar SDocument693 pagesIamsar SCarina RipollNo ratings yet
- Clasificación Por Cobertura GeográficaDocument16 pagesClasificación Por Cobertura GeográficaAmadeus MozartNo ratings yet
- Installation and Commissioning Checklist DBS - BTS3900 v5 3Document16 pagesInstallation and Commissioning Checklist DBS - BTS3900 v5 3serkabNo ratings yet