You might also like
- Investigacion Unidad 4 Diferenciacion e Integracion NumericaDocument8 pagesInvestigacion Unidad 4 Diferenciacion e Integracion Numericamartin4lpNo ratings yet
- Capitulo6 - Integral de Linea-2021Document33 pagesCapitulo6 - Integral de Linea-2021Elias MaytaNo ratings yet
- Cap 3, Sec 3.9, DiferencialesDocument28 pagesCap 3, Sec 3.9, Diferencialesjose2182100% (3)
- Métodos numéricos para resolver ecuaciones diferencialesDocument16 pagesMétodos numéricos para resolver ecuaciones diferencialesPicón Gamarra Alex JuniorNo ratings yet
- Ecuación calor diferencias finitas MATLABDocument7 pagesEcuación calor diferencias finitas MATLABwjdaee100% (2)
- Tip2 - Modelo 2 MDocument4 pagesTip2 - Modelo 2 MFórmularios PPT,PDF Y DOCSNo ratings yet
- Teorema de La DivergenciaDocument10 pagesTeorema de La DivergenciaAlexis CruzNo ratings yet
- Primera Practica Ecuaciones Diferenciales MatlabDocument12 pagesPrimera Practica Ecuaciones Diferenciales MatlabOmar Esteban Molina PenagosNo ratings yet
- Cálculo de integrales definidas y primitivasDocument22 pagesCálculo de integrales definidas y primitivasconchiNo ratings yet
- Practica 2 y 3 - Diferenciación e IntegracionDocument20 pagesPractica 2 y 3 - Diferenciación e IntegracionRonaldNo ratings yet
- Final 20 - 21 (Primavera)Document6 pagesFinal 20 - 21 (Primavera)Nuria TorquetNo ratings yet
- Introduccion A MATLAB 3Document12 pagesIntroduccion A MATLAB 3Xavier RodríguezNo ratings yet
- Parcial 1 TenDocument5 pagesParcial 1 TenLeah ClovisNo ratings yet
- Calculo Vectorial: Derivadas ParcialesDocument13 pagesCalculo Vectorial: Derivadas ParcialesFederLauritoNo ratings yet
- Problemas Calculo Derivadas 09 06Document13 pagesProblemas Calculo Derivadas 09 06Job Silvestre FulgencioNo ratings yet
- Formula Integral de CauchyDocument14 pagesFormula Integral de CauchySKKNo ratings yet
- TVI Biseccion 1Document2 pagesTVI Biseccion 1lorenzoNo ratings yet
- Resolución de integrales definidas mediante la regla del trapecioDocument22 pagesResolución de integrales definidas mediante la regla del trapecioEsmeralda GuerreroNo ratings yet
- TranMatematicasIIITema2 2019 ImprimirDocument10 pagesTranMatematicasIIITema2 2019 ImprimirAlberto ElenaNo ratings yet
- Método multiplicadores Lagrange, coordenadas polaresDocument7 pagesMétodo multiplicadores Lagrange, coordenadas polaresCésar BermúdezNo ratings yet
- República Bolivariana de Venezuel9Document5 pagesRepública Bolivariana de Venezuel9AlexanderNo ratings yet
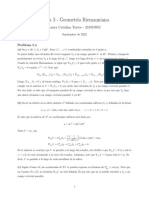
- Tarea 3Document3 pagesTarea 3Catalina TorresNo ratings yet
- Teorema de GreenDocument14 pagesTeorema de GreenCarlosNo ratings yet
- Act 12 Lección Evaluativa Unidad No. 3 - Metodo NumericoDocument15 pagesAct 12 Lección Evaluativa Unidad No. 3 - Metodo NumericoKaren JardimNo ratings yet
- Tema5 TranspDocument20 pagesTema5 Transpjoseee.27No ratings yet
- Metodos (Ingeniera)Document9 pagesMetodos (Ingeniera)Jose CarlosNo ratings yet
- Ondas viajeras: Soluciones en forma de onda viajeraDocument4 pagesOndas viajeras: Soluciones en forma de onda viajeraThaily Arias MayNo ratings yet
- Cap 5 - Aplicaciones de La DerivadaDocument9 pagesCap 5 - Aplicaciones de La DerivadaDiana HurtadoNo ratings yet
- Trabajo FinalDocument16 pagesTrabajo FinalVanessa VigilNo ratings yet
- Introducción al Cálculo Infinitesimal - Derivadas Direccionales y Vector GradienteDocument20 pagesIntroducción al Cálculo Infinitesimal - Derivadas Direccionales y Vector GradienteCarlos ZepólNo ratings yet
- 7ayudantiacalculoiii 209Document2 pages7ayudantiacalculoiii 209Daniel VegaNo ratings yet
- Examen Tema 4-Geometria AnaliticaDocument3 pagesExamen Tema 4-Geometria AnaliticaklauNo ratings yet
- Informe de Laboratorio N°3 de Ecuaciones DiferencialesDocument6 pagesInforme de Laboratorio N°3 de Ecuaciones DiferencialesRodrigo Condori abeciaNo ratings yet
- Clave Segundo 2do C 2019 Tema 1Document4 pagesClave Segundo 2do C 2019 Tema 1super futNo ratings yet
- Solucion Tarea 1Document12 pagesSolucion Tarea 1Yerson RomeroNo ratings yet
- Ensayo 2 SolucionarioDocument27 pagesEnsayo 2 Solucionariowiz mathNo ratings yet
- Equaciones Dif en MathcadDocument44 pagesEquaciones Dif en MathcadUalitoNo ratings yet
- Ejercicios de Modelos MatematicosDocument29 pagesEjercicios de Modelos MatematicosValeria VillalobosNo ratings yet
- Preliminares Matemáticas y Análisis de ErrorDocument7 pagesPreliminares Matemáticas y Análisis de ErrorAlexander BenegasNo ratings yet
- Fund Mat05Document8 pagesFund Mat05Francisco CuevasNo ratings yet
- Derivadas Parciales Segundas. Polinomios de TaylorDocument13 pagesDerivadas Parciales Segundas. Polinomios de TaylorJhoana YucraNo ratings yet
- CV-extremos CondicionadosDocument13 pagesCV-extremos CondicionadosPablo AlfanoNo ratings yet
- Teorema de CauchyDocument7 pagesTeorema de CauchyalanNo ratings yet
- Expansión de Laplace para Calcular DeterminantesDocument5 pagesExpansión de Laplace para Calcular DeterminantesLuvianPerez LauraAngelicaNo ratings yet
- 02 GeptecneDocument79 pages02 GeptecneH V Vera RuizNo ratings yet
- Capitulo7 - Integrales de Superficie 2021Document26 pagesCapitulo7 - Integrales de Superficie 2021Elias MaytaNo ratings yet
- ParametrizacionesDocument4 pagesParametrizacionesDaniel MoralesNo ratings yet
- Diagrama Penrose KruskalDocument2 pagesDiagrama Penrose KruskalVirgilio Jose Cambraia LopesNo ratings yet
- Adams MoultonDocument9 pagesAdams MoultonBryan Ronald Beltran QuispeNo ratings yet
- Métodos numéricos de integraciónDocument10 pagesMétodos numéricos de integraciónNatyOlivaNo ratings yet
- Derv Int QuarteroniDocument20 pagesDerv Int QuarteroniborigueNo ratings yet
- Método de diferencias finitas para ecuaciones diferenciales parcialesDocument50 pagesMétodo de diferencias finitas para ecuaciones diferenciales parcialesIris Sandoval RojasNo ratings yet
- NTU1CALIIIMEDocument18 pagesNTU1CALIIIMEJ Isaias BastidasNo ratings yet
- EdosDocument12 pagesEdosIgnacio JuárezNo ratings yet
- Métodos Numéricos y Ecuaciones DiferencialesDocument6 pagesMétodos Numéricos y Ecuaciones DiferencialesCarlos BarrazuetaNo ratings yet
- Derivada ParcialDocument21 pagesDerivada ParcialJheferson Tabraj Ramirez100% (1)
- Método de Diferencias FinitasDocument6 pagesMétodo de Diferencias FinitasJesús VarguezNo ratings yet
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesFrom EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesNo ratings yet
- Teoría de cuerpos y teoría de GaloisFrom EverandTeoría de cuerpos y teoría de GaloisRating: 5 out of 5 stars5/5 (1)
- 5-Teodolito II PDFDocument2 pages5-Teodolito II PDFlukassk1No ratings yet
- TeodolitoDocument15 pagesTeodolitodiegorfNo ratings yet
- 10-Replanteo de Curvas HorizontalesDocument3 pages10-Replanteo de Curvas HorizontalesMartin Cergneux0% (1)
- PoligonalesDocument34 pagesPoligonalesPedro M Martinez LizcanoNo ratings yet
- 1-Temas IntroductoriosDocument7 pages1-Temas IntroductoriosTomasManaNo ratings yet
- Verificación de muros portantes: dimensionado y tensionesDocument37 pagesVerificación de muros portantes: dimensionado y tensionesSantiago Casal100% (2)
- Series de FourierDocument25 pagesSeries de FourierFlavio Cesar Alvitez VasquezNo ratings yet
- Serie de FourierDocument6 pagesSerie de FourierdiegorfNo ratings yet
- CIRSOC Estructuras de Hormigon ArmadoDocument21 pagesCIRSOC Estructuras de Hormigon ArmadodiegorfNo ratings yet
- 5-Teodolito II PDFDocument2 pages5-Teodolito II PDFlukassk1No ratings yet
- Tapa201 1 100 PDFDocument100 pagesTapa201 1 100 PDFFrank SerpicoNo ratings yet
- Edo EspolDocument87 pagesEdo EspolernestosandNo ratings yet
- CCT Industria Construccion 76-1975Document29 pagesCCT Industria Construccion 76-1975Estudio Jurídico QuadrelliNo ratings yet
- Clase Nº9 Talud-CunetaDocument24 pagesClase Nº9 Talud-CunetadiegorfNo ratings yet
- Clase Nº5 Alineamiento HorizontalDocument44 pagesClase Nº5 Alineamiento HorizontalmatialmazanNo ratings yet
- Clase Nº6 Alineamiento VerticalDocument44 pagesClase Nº6 Alineamiento VerticalmatialmazanNo ratings yet
- Clase Nº7 Sección TransversalDocument38 pagesClase Nº7 Sección TransversaldiegorfNo ratings yet
- Clase Nº3 Asp - Gener.-DistanciasDocument22 pagesClase Nº3 Asp - Gener.-DistanciasdiegorfNo ratings yet
- 09 SeñalesDocument92 pages09 SeñalesAriel HumerezNo ratings yet
- 16 Cap. 9 - Servicios Equipos InstalacionesDocument34 pages16 Cap. 9 - Servicios Equipos Instalacionesmariogut2000No ratings yet
- Clase Nº3 Asp - Gener.-DistanciasDocument22 pagesClase Nº3 Asp - Gener.-DistanciasdiegorfNo ratings yet
- Clase Nº6 Alineamiento VerticalDocument44 pagesClase Nº6 Alineamiento VerticalmatialmazanNo ratings yet
- Clase Nº8 Costado Del CaminoDocument20 pagesClase Nº8 Costado Del CaminodiegorfNo ratings yet
- 07 Cap 4 Superficies PDFDocument63 pages07 Cap 4 Superficies PDFfelix230292No ratings yet
- 16 Cap. 9 - Servicios Equipos InstalacionesDocument34 pages16 Cap. 9 - Servicios Equipos Instalacionesmariogut2000No ratings yet
- Clase Nº3 Asp - Gener.-DistanciasDocument22 pagesClase Nº3 Asp - Gener.-DistanciasdiegorfNo ratings yet
- 09 SeñalesDocument92 pages09 SeñalesAriel HumerezNo ratings yet
- Vías 1Document26 pagesVías 1diegorfNo ratings yet
- 2 Caracter y Objetivo de Los Caminos 1Document10 pages2 Caracter y Objetivo de Los Caminos 1diegorfNo ratings yet
- Piqueteo y amojonamiento en levantamientos topográficos vialesDocument42 pagesPiqueteo y amojonamiento en levantamientos topográficos vialesdiegorfNo ratings yet
- W DiferencialDocument24 pagesW DiferencialfrayquijanohinopstroNo ratings yet
- 2.2-. Reglas de AdicionDocument12 pages2.2-. Reglas de AdicionJosé Gerardo Sauceda CastilloNo ratings yet
- Humanoides, Julio 1953, Villares Del Saz (Cuenca), J.A.CaravacaDocument15 pagesHumanoides, Julio 1953, Villares Del Saz (Cuenca), J.A.CaravacaamigokikeNo ratings yet
- Plan de Desarrollo de SoftwareDocument14 pagesPlan de Desarrollo de SoftwareJonathan Muñoz Aleman0% (1)
- Sesion BDocument55 pagesSesion Blapb993264No ratings yet
- Clasificacion Fenotipo PeriodontalDocument2 pagesClasificacion Fenotipo PeriodontalLaura Andrea Agudelo WilchesNo ratings yet
- Transacciónes AtómicasDocument38 pagesTransacciónes AtómicasRicardo Hernández AlvaradoNo ratings yet
- Diagrama de Causa EfectoDocument1 pageDiagrama de Causa Efectourl ccNo ratings yet
- Importancia del uso responsable del celularDocument3 pagesImportancia del uso responsable del celularQuito NeiraNo ratings yet
- Biografia de Santa GertrudisDocument3 pagesBiografia de Santa Gertrudiseloisal100% (2)
- Ingenieria Economica-T1Document21 pagesIngenieria Economica-T1heprietorNo ratings yet
- Análisis Despues de Las CarrerasDocument21 pagesAnálisis Despues de Las CarrerasLuis Alberto Martinez Sanchez67% (3)
- Sesion PrimeroDocument4 pagesSesion PrimeroVICTOR PINCHI MARINANo ratings yet
- Modelo de Denuncia Por No Respuesta A Un Solicitud en El Plazo de LEY UGELDocument4 pagesModelo de Denuncia Por No Respuesta A Un Solicitud en El Plazo de LEY UGELFredy Ochoa LeónNo ratings yet
- TEORÍADocument8 pagesTEORÍAGinaLlashagFigairasNo ratings yet
- Mamani Yurica Garcia YeseniaDocument131 pagesMamani Yurica Garcia YeseniaYane LyNo ratings yet
- La Prueba de OficioDocument3 pagesLa Prueba de OficioYomaira Sinahí Ñaño SalinasNo ratings yet
- Aprendizaje y Desarrollo de La Personalidad TestDocument28 pagesAprendizaje y Desarrollo de La Personalidad TestAna HernandezNo ratings yet
- TA - Desarrollo de Casos de Estudio 6-9Document5 pagesTA - Desarrollo de Casos de Estudio 6-9Jahir Fernandez NanandeNo ratings yet
- Constancias Nuevas de Familia en Accion 2017Document68 pagesConstancias Nuevas de Familia en Accion 2017ricardo andresNo ratings yet
- Levantamiento Observacion SUNARP CLAUDIA MERCEDEZDocument2 pagesLevantamiento Observacion SUNARP CLAUDIA MERCEDEZLuis Miguel Angel100% (1)
- Revisión crítica de la 'Dignitatis Humanae' 40 años despuésDocument22 pagesRevisión crítica de la 'Dignitatis Humanae' 40 años despuésdiogenescanNo ratings yet
- Habilidades Directivas U4Document30 pagesHabilidades Directivas U4Nancy StephanyNo ratings yet
- Sistematización de Resultados CuantitativosDocument15 pagesSistematización de Resultados CuantitativosAngela Liliana Baylon FranciaNo ratings yet
- Filosofía y Consuelo de La Música, Virtud y Utilidad de La Música. ResumenDocument2 pagesFilosofía y Consuelo de La Música, Virtud y Utilidad de La Música. ResumenPablo Vargas VergaraNo ratings yet
- Política educativa MéxicoDocument30 pagesPolítica educativa MéxicoYolanda Margarita Vazquez AlvarezNo ratings yet
- LuxorDocument11 pagesLuxordavid_buendia78No ratings yet
- Caso 1 DUI 2019 201 C 3430Document4 pagesCaso 1 DUI 2019 201 C 3430Ivan Escobar VargasNo ratings yet
- CEPRE UNJBG 2020 II Semana 01Document2 pagesCEPRE UNJBG 2020 II Semana 01Nelson GonzalesNo ratings yet
- Calculo 1Document6 pagesCalculo 1Giselle NavarroNo ratings yet