You might also like
- Tarea de AMI - Semana 8Document74 pagesTarea de AMI - Semana 8Jonathan HumLopezNo ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Practica 1Document27 pagesPractica 1Rose NrgNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Lecture17-CE72.12QuadElements and JacobianDocument20 pagesLecture17-CE72.12QuadElements and JacobianRahul KasaudhanNo ratings yet
- Fórmulas Del Examen - Física 1Document1 pageFórmulas Del Examen - Física 1El UriNo ratings yet
- MIE100H1 - 20195 - 631572298320MIE 100 CheatsheetDocument2 pagesMIE100H1 - 20195 - 631572298320MIE 100 CheatsheetSCR PpelusaNo ratings yet
- Ejercicio de Acomplamientos de BobinasDocument1 pageEjercicio de Acomplamientos de BobinasDavid BattoNo ratings yet
- Maxmin Integral2Document15 pagesMaxmin Integral2Zahwa Vieny AdhaNo ratings yet
- Caie A2 Further Maths 9231 Further Pure 2Document17 pagesCaie A2 Further Maths 9231 Further Pure 2Đạt NguyễnNo ratings yet
- قوانينDocument1 pageقوانينMajd OsamaNo ratings yet
- Formulario Matter and Energy IDocument3 pagesFormulario Matter and Energy IHever AranaNo ratings yet
- Chapter 1.2 (Separable Eq)Document10 pagesChapter 1.2 (Separable Eq)Noi IvyNo ratings yet
- Comparison Between Linear and Rotational DynamicsDocument1 pageComparison Between Linear and Rotational DynamicsDEEPAK TNo ratings yet
- Ernest DziekporDocument10 pagesErnest Dziekporbennaustin.weNo ratings yet
- Formulario Calculo Mauricio Rodríguez TaceaDocument11 pagesFormulario Calculo Mauricio Rodríguez TaceaMau TaceaNo ratings yet
- Formulario de Física ClásicaDocument4 pagesFormulario de Física Clásicadiego9723No ratings yet
- AET - Module 5Document26 pagesAET - Module 5Jesna SNo ratings yet
- Physics EquationsDocument2 pagesPhysics Equationsapi-641245937No ratings yet
- First Order Differential Part 2Document7 pagesFirst Order Differential Part 2nazirulaliNo ratings yet
- Problem 2: If:, 0 Is Purely Imaginary Then Find The Value ofDocument1 pageProblem 2: If:, 0 Is Purely Imaginary Then Find The Value ofMani NaiduNo ratings yet
- PD Homogin Dan EksakDocument23 pagesPD Homogin Dan EksakVincent RompiesNo ratings yet
- Math IA On CalculusDocument9 pagesMath IA On CalculusZehraNo ratings yet
- 02 Stage Process Models20-5802-16310280714100Document28 pages02 Stage Process Models20-5802-16310280714100Tle SupawidNo ratings yet
- Questão 01 NOTAÇÃO INDICIALDocument5 pagesQuestão 01 NOTAÇÃO INDICIALAnderson SilvaNo ratings yet
- Oxford AQA A Level Physics Unit 3 Insert Jan19Document4 pagesOxford AQA A Level Physics Unit 3 Insert Jan19Pop VNo ratings yet
- Physics 141 Equation Sheet-Knight 4 EdDocument1 pagePhysics 141 Equation Sheet-Knight 4 EdSimon SituNo ratings yet
- Explicit and Implicit MethodDocument10 pagesExplicit and Implicit MethodnisargNo ratings yet
- Lec 3Document17 pagesLec 3hamadox23No ratings yet
- Cálculo IV - Equações Diferenciais Ordinárias Prof. Valdson SimõesDocument2 pagesCálculo IV - Equações Diferenciais Ordinárias Prof. Valdson SimõesLuiz FrançaNo ratings yet
- Lecture 11Document26 pagesLecture 11habibullah abedNo ratings yet
- Deep Learning Basics Lecture 2 BackpropagationDocument31 pagesDeep Learning Basics Lecture 2 BackpropagationbarisNo ratings yet
- Vivin Mahfiroh - Business Math - Thread 1Document2 pagesVivin Mahfiroh - Business Math - Thread 1vhyNo ratings yet
- Series NTH Order Derivative Mansoor Tahir PDFDocument1 pageSeries NTH Order Derivative Mansoor Tahir PDFAtifAwanNo ratings yet
- Series NTH Order Derivative Mansoor Tahir PDFDocument1 pageSeries NTH Order Derivative Mansoor Tahir PDFFaisal KhawarNo ratings yet
- Integral de Funciones Racionales TrigonometricaDocument6 pagesIntegral de Funciones Racionales Trigonometricajose armando rosas reyesNo ratings yet
- Implementasi Eliminasi GaussDocument2 pagesImplementasi Eliminasi GaussSava DevaraNo ratings yet
- 4 - DerivativesDocument29 pages4 - DerivativesABBEY SOFIA DELA VINA100% (1)
- Chapter 1 - Part 4Document11 pagesChapter 1 - Part 4fuad addibNo ratings yet
- MATH147 Techniques PDFDocument25 pagesMATH147 Techniques PDFMìgùèl VìllàgràcìàNo ratings yet
- IntegracionDocument2 pagesIntegracionLiz De Jimin HmNo ratings yet
- CurvatureDocument23 pagesCurvatureheyhowwhy67No ratings yet
- Taller Ecuaciones DiferencialesDocument7 pagesTaller Ecuaciones DiferencialesDANIEL FELIPE RUBIANO CAPERANo ratings yet
- Operating Functions Ans. Key PDFDocument2 pagesOperating Functions Ans. Key PDFKC CampilanNo ratings yet
- Perform The Following Fundamental Operations On The Given FunctionsDocument2 pagesPerform The Following Fundamental Operations On The Given FunctionsJhon Michael FranciscoNo ratings yet
- Operating Functions Ans. Key PDFDocument2 pagesOperating Functions Ans. Key PDFKC CampilanNo ratings yet
- Formulario: Caja Cubo o Hexaedro Cilindro Circular RectoDocument1 pageFormulario: Caja Cubo o Hexaedro Cilindro Circular RectoKaren Sofia AcevedoNo ratings yet
- 3.6-Bilinear Transformation 025506Document17 pages3.6-Bilinear Transformation 025506EEE M.AASTHIKANo ratings yet
- Formula SheetDocument1 pageFormula SheetAerospace WestonNo ratings yet
- SNR Physics 19 Formula Data BookDocument8 pagesSNR Physics 19 Formula Data BookBilly BlattNo ratings yet
- Design and Analysis of AlgorithmsDocument19 pagesDesign and Analysis of AlgorithmsHanif UllahNo ratings yet
- C3 Chp5 TransformingGraphsDocument19 pagesC3 Chp5 TransformingGraphsAdil HafeezNo ratings yet
- 2b. TECHNIQUES OF INTEGRATION by Substitution With ExampleDocument31 pages2b. TECHNIQUES OF INTEGRATION by Substitution With ExampleMildred Cardenas BañezNo ratings yet
- Practica 6Document12 pagesPractica 6SERGIO SEBASTIAN BALDERA AMAYANo ratings yet
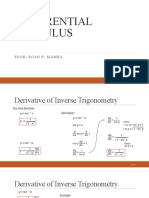
- Differentiation of Inverse Trigonometric FunctionsDocument5 pagesDifferentiation of Inverse Trigonometric FunctionsDaniela ComacaoNo ratings yet
- 1.4. Homogeneous Equation of Euler'S MethodDocument22 pages1.4. Homogeneous Equation of Euler'S MethodindraNo ratings yet
- Formulari BiofísicaDocument1 pageFormulari BiofísicajpassadagilNo ratings yet
- Formulario Física 2Document2 pagesFormulario Física 2carlos camposNo ratings yet
- Plantilla Formulario Nuevo 1Document1 pagePlantilla Formulario Nuevo 1Faty EspinosaNo ratings yet
- O Seen S Correction To Stokes Drag RevisitedDocument10 pagesO Seen S Correction To Stokes Drag RevisitedAnanda SubramaniNo ratings yet
- Jefferys 1956 (Methods of Mathematical Physics)Document726 pagesJefferys 1956 (Methods of Mathematical Physics)Ananda SubramaniNo ratings yet
- Multiphase Simulation of Fiber Suspension Flows Using Immersed Boundary MethodsDocument8 pagesMultiphase Simulation of Fiber Suspension Flows Using Immersed Boundary MethodsAnanda SubramaniNo ratings yet
- Vectors Tensors CompleteDocument206 pagesVectors Tensors CompleteAnanda SubramaniNo ratings yet
- Diss 41 - ASK - Application of CFD-DeM in The Food and Agriculture Sector (Brief Survey)Document2 pagesDiss 41 - ASK - Application of CFD-DeM in The Food and Agriculture Sector (Brief Survey)Ananda SubramaniNo ratings yet
- Continuum Models For Brownian MotionDocument1 pageContinuum Models For Brownian MotionAnanda SubramaniNo ratings yet
- DELRINDocument35 pagesDELRINIsczuNo ratings yet
- Computer Experiments' On Classical FluidsDocument6 pagesComputer Experiments' On Classical FluidsAnanda SubramaniNo ratings yet
- Cellular Diffusion CHPTDocument19 pagesCellular Diffusion CHPTAnanda SubramaniNo ratings yet
- Computer and Computing Technologies in AgricultureDocument777 pagesComputer and Computing Technologies in AgricultureAnanda SubramaniNo ratings yet
- MIT5 72S12 Master1Document23 pagesMIT5 72S12 Master1Hudson RochaNo ratings yet
- PPD Final Report Group 9Document63 pagesPPD Final Report Group 9Ananda Subramani67% (3)
- Anamolous Diffusion CHPTDocument31 pagesAnamolous Diffusion CHPTAnanda SubramaniNo ratings yet
- IterMethBook 2ndedDocument567 pagesIterMethBook 2ndedFidkekd LeiNo ratings yet
- Class 2Document65 pagesClass 2Adrian JacksonNo ratings yet
- Single Cell Protein: By-Ananda Subramani K 1MS07BT004 M.S.Ramaiah Institute of Technology BangaloreDocument28 pagesSingle Cell Protein: By-Ananda Subramani K 1MS07BT004 M.S.Ramaiah Institute of Technology BangaloreAnanda SubramaniNo ratings yet
- GE1 (Mathematic in The Modern World) SyllabusDocument8 pagesGE1 (Mathematic in The Modern World) SyllabusTrish LaguitanNo ratings yet
- Work, Energy and PowerDocument56 pagesWork, Energy and PowerAnu MakhijaNo ratings yet
- Calculation of Electric Field DistributiDocument9 pagesCalculation of Electric Field DistributiAbouZakariaNo ratings yet
- Cbse Class 12 English The Last Lesson Revision NotesDocument2 pagesCbse Class 12 English The Last Lesson Revision NotesryumaroronaNo ratings yet
- Solution Manual For Applied Statics and Strength of Materials 6th Edition 6th EditionDocument20 pagesSolution Manual For Applied Statics and Strength of Materials 6th Edition 6th EditionBonnie Kosiorek100% (36)
- Daily Practice Problem Sheet 109: Gaurav AroraDocument3 pagesDaily Practice Problem Sheet 109: Gaurav AroraKushant BaldeyNo ratings yet
- Tu 5.2.3Document56 pagesTu 5.2.3Atul SinghNo ratings yet
- Normal Probability DistributionDocument17 pagesNormal Probability DistributionGladzangel LoricabvNo ratings yet
- Akcela Aceites Fichas TecnicasDocument44 pagesAkcela Aceites Fichas TecnicasGUILLERMO SEGURANo ratings yet
- Steel Design 5 May 2022Document3 pagesSteel Design 5 May 2022tous les joursNo ratings yet
- Norma Iso 5630-Parte 3Document12 pagesNorma Iso 5630-Parte 3Nestor Mejia LondoñoNo ratings yet
- Animal Breeding ManualDocument43 pagesAnimal Breeding ManualMELITO JR. CATAYLONo ratings yet
- Plac908 Dap Record 5 2023Document3 pagesPlac908 Dap Record 5 2023api-706977810No ratings yet
- Preferences and Positivist Methodology in EconomicsDocument21 pagesPreferences and Positivist Methodology in EconomicsAndrés GarcíaNo ratings yet
- CSR Dissertation TitlesDocument6 pagesCSR Dissertation TitlesPaperWritersForCollegeCanada100% (1)
- The Mandalorian S02E08 WEBRip x264-ION10Document27 pagesThe Mandalorian S02E08 WEBRip x264-ION10AlexJKDCQCNo ratings yet
- Scary Story EssayDocument8 pagesScary Story Essayymmrexwhd100% (2)
- Hydrograph Analysis: Streamflow MeasurementDocument17 pagesHydrograph Analysis: Streamflow MeasurementUmange RanasingheNo ratings yet
- Int Fire Alarm - CPL Okems Tu (HND)Document80 pagesInt Fire Alarm - CPL Okems Tu (HND)NjitnumNo ratings yet
- 2008 - An Optical, EPR and Electrical Conductivity Study of Blue Barium TitanateDocument8 pages2008 - An Optical, EPR and Electrical Conductivity Study of Blue Barium TitanateBeh NaatNo ratings yet
- Innovative Numerical Protection Relay Design On The Basis of Sampled Measured Values For Smart GridsDocument225 pagesInnovative Numerical Protection Relay Design On The Basis of Sampled Measured Values For Smart GridsNazi JoonNo ratings yet
- Cannon-Ball Engineering: (Consulting Engineers)Document2 pagesCannon-Ball Engineering: (Consulting Engineers)isaacjoe77100% (1)
- OralCom q1 Mod3 Barrierstocommunciation v5Document33 pagesOralCom q1 Mod3 Barrierstocommunciation v5KryssssNo ratings yet
- WWW Samsung Com - TranslateDocument5 pagesWWW Samsung Com - TranslateÇAĞATAY ÇALIŞKANNo ratings yet
- Response of Buried Pipes Taking Into Account Seismic and Soil Spatial VariabilitiesDocument8 pagesResponse of Buried Pipes Taking Into Account Seismic and Soil Spatial VariabilitiesBeh RangNo ratings yet
- Session 4 Stephanie CicchiniDocument20 pagesSession 4 Stephanie CicchiniMarinos GounaridisNo ratings yet
- MTH 127 PDFDocument4 pagesMTH 127 PDFMichaelNo ratings yet
- Ant 101: Introduction To AnthropologyDocument20 pagesAnt 101: Introduction To AnthropologyAmina MatinNo ratings yet
- TDS-EN-Congrout AF - Rev 013-Aug 21Document1 pageTDS-EN-Congrout AF - Rev 013-Aug 21LONG LASTNo ratings yet
- Lecture 1 Nano Macro BuehlerDocument66 pagesLecture 1 Nano Macro BuehlerVarun RavikumarNo ratings yet
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (410)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1396)
- Mastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicFrom EverandMastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicRating: 4 out of 5 stars4/5 (91)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (157)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Infinite Powers: How Calculus Reveals the Secrets of the UniverseFrom EverandInfinite Powers: How Calculus Reveals the Secrets of the UniverseRating: 4.5 out of 5 stars4.5/5 (126)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessFrom EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (57)
- Too Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldFrom EverandToo Big for a Single Mind: How the Greatest Generation of Physicists Uncovered the Quantum WorldRating: 4.5 out of 5 stars4.5/5 (8)
- AP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeFrom EverandAP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeNo ratings yet
- Starry Messenger: Cosmic Perspectives on CivilizationFrom EverandStarry Messenger: Cosmic Perspectives on CivilizationRating: 4.5 out of 5 stars4.5/5 (159)
- Once Upon an Algorithm: How Stories Explain ComputingFrom EverandOnce Upon an Algorithm: How Stories Explain ComputingRating: 4 out of 5 stars4/5 (43)