You might also like
- Server Architectures: Multiprocessors, Clusters, Parallel Systems, Web Servers, Storage SolutionsFrom EverandServer Architectures: Multiprocessors, Clusters, Parallel Systems, Web Servers, Storage SolutionsNo ratings yet
- OS Part 02 PDFDocument93 pagesOS Part 02 PDFNguyen Tuan AnhNo ratings yet
- Operating System (Day - 1)Document69 pagesOperating System (Day - 1)Nirajan BasnetNo ratings yet
- Threads: Bilkent University Department of Computer Engineering CS342 Operating SystemsDocument69 pagesThreads: Bilkent University Department of Computer Engineering CS342 Operating SystemsMuhammed NaciNo ratings yet
- Processes and Threads: - An Operating System Executes A Variety of ProgramsDocument24 pagesProcesses and Threads: - An Operating System Executes A Variety of ProgramsJasvin LiyunNo ratings yet
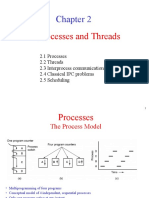
- Processes and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingDocument55 pagesProcesses and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingManasa M RNo ratings yet
- Processes and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingDocument55 pagesProcesses and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingAndressa VieiraNo ratings yet
- Threads, SMP, and MicrokernelsDocument52 pagesThreads, SMP, and Microkernelsapi-26103409No ratings yet
- System Programming - II ThreadsDocument46 pagesSystem Programming - II ThreadsAbdul Samad KhanNo ratings yet
- Lecture ThreadDocument45 pagesLecture ThreadMohamad YassineNo ratings yet
- 2.process and ThredsDocument48 pages2.process and ThredsQasim AbbasNo ratings yet
- Chapter 04Document35 pagesChapter 04Treciouh MNo ratings yet
- Lec#4 RDocument59 pagesLec#4 RiamsabaalyNo ratings yet
- Shafila f1233 WordDocument6 pagesShafila f1233 Wordnr shfilaaNo ratings yet
- Multiprocessors, Threads and Microkernels: Fred KuhnsDocument46 pagesMultiprocessors, Threads and Microkernels: Fred KuhnsmaheshKoliNo ratings yet
- 2 Processes ThreadsDocument15 pages2 Processes ThreadsMohi Gpt4No ratings yet
- Chapter 3 ProcessesDocument42 pagesChapter 3 ProcessesLusi ሉሲNo ratings yet
- Lecture 5Document31 pagesLecture 5Dr. Muhammad RazaNo ratings yet
- Operating System ProcessDocument57 pagesOperating System Processsasongko wardhanaNo ratings yet
- 2chapter Two - Process ManagementDocument32 pages2chapter Two - Process ManagementNasis DerejeNo ratings yet
- Boss-Unit 1Document47 pagesBoss-Unit 1Dhruv PanditNo ratings yet
- CM Os 5sem Chapter3Document40 pagesCM Os 5sem Chapter3Harshita WankhedeNo ratings yet
- Os - Module 2Document34 pagesOs - Module 2bnsagar27No ratings yet
- Lec#6Document29 pagesLec#6iamsabaalyNo ratings yet
- Chapter 4Document57 pagesChapter 4Itumeleng MokhachaneNo ratings yet
- Threads: Multithreading Models Threading Issues Pthreads Windows XP Threads Linux Threads Java ThreadsDocument7 pagesThreads: Multithreading Models Threading Issues Pthreads Windows XP Threads Linux Threads Java ThreadsRaj KumarNo ratings yet
- ThreadsDocument32 pagesThreadsNikhil TataNo ratings yet
- ProcessDocument33 pagesProcessSrijan singhNo ratings yet
- Parallel Processing Parallel ProcessingDocument64 pagesParallel Processing Parallel Processingpari638877No ratings yet
- Chapter 02Document67 pagesChapter 02kanageskNo ratings yet
- CSC 322 Operating Systems Concepts - 6:: Special Thanks ToDocument24 pagesCSC 322 Operating Systems Concepts - 6:: Special Thanks ToAbdul MohaimanNo ratings yet
- Operating System 4Document33 pagesOperating System 4Seham123123No ratings yet
- Week 5 DiscussionDocument38 pagesWeek 5 DiscussionSiri Varshitha Reddy LingareddyNo ratings yet
- Multiple Processor Systems: 8.1 Multiprocessors 8.2 Multicomputers 8.3 Distributed SystemsDocument55 pagesMultiple Processor Systems: 8.1 Multiprocessors 8.2 Multicomputers 8.3 Distributed Systemsmaged abbassNo ratings yet
- Chapter 2 PDFDocument83 pagesChapter 2 PDFMebratu AsratNo ratings yet
- Lecture 3 Multiprocessor Vs Multicomputer Vs DSDocument55 pagesLecture 3 Multiprocessor Vs Multicomputer Vs DSericNo ratings yet
- 4 ThreadsDocument37 pages4 ThreadsAditi VermaNo ratings yet
- System&ApplicationsoftDocument48 pagesSystem&ApplicationsoftMuhammad HuzaifaNo ratings yet
- Chapter - 3 ProcessDocument47 pagesChapter - 3 ProcessEsta AmeNo ratings yet
- Week 4 - ThreadsDocument37 pagesWeek 4 - ThreadsCrisostomo CalitinaNo ratings yet
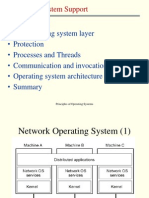
- Introduction: Operating System SupportDocument63 pagesIntroduction: Operating System SupportErmercado78No ratings yet
- Part 1 - Lecture 2 - Parallel HardwareDocument60 pagesPart 1 - Lecture 2 - Parallel HardwareAhmad AbbaNo ratings yet
- CS 3220: Operating Systems: InstructorDocument38 pagesCS 3220: Operating Systems: InstructorZeeshan WasiNo ratings yet
- CSE2005 ETH Reference Material I Module2 ThreadsDocument39 pagesCSE2005 ETH Reference Material I Module2 ThreadsKanishka MalikNo ratings yet
- Processes: Operating Systems: Internals and Design Principles, 6/EDocument52 pagesProcesses: Operating Systems: Internals and Design Principles, 6/EM Shahid KhanNo ratings yet
- Database Models and System ArchitectureDocument60 pagesDatabase Models and System Architectureujjwal subediNo ratings yet
- Deparment of Computer Systems Engingeering: Mirpur University of Science and Technology (Must), MirpurDocument24 pagesDeparment of Computer Systems Engingeering: Mirpur University of Science and Technology (Must), MirpurAiman MansoorNo ratings yet
- 5 Threads PDFDocument34 pages5 Threads PDFGhanshyam JhaNo ratings yet
- Operating Systems: Lesson 3: Introduction To Process ManagementDocument52 pagesOperating Systems: Lesson 3: Introduction To Process ManagementasdasdNo ratings yet
- 02-Chap02-Processes-Threads-Part1-2slots (3) (Autosaved)Document80 pages02-Chap02-Processes-Threads-Part1-2slots (3) (Autosaved)datnhqe180140No ratings yet
- 1 Introduction p3Document10 pages1 Introduction p3Mohi Gpt4No ratings yet
- Operating Systems: Bits, Pilani - K. K. Birla Goa CampusDocument50 pagesOperating Systems: Bits, Pilani - K. K. Birla Goa CampusDarshan ParmarNo ratings yet
- Processes and Threads: - Processes Have Two CharacteristicsDocument35 pagesProcesses and Threads: - Processes Have Two CharacteristicsJenish PatelNo ratings yet
- Week6 ProcmgmtDocument44 pagesWeek6 ProcmgmtNinadNo ratings yet
- Operating 12system OriDocument102 pagesOperating 12system Oriapi-3716254No ratings yet
- OS Lec 5 & 6Document24 pagesOS Lec 5 & 6HasnainNo ratings yet
- Chapter 4Document45 pagesChapter 4bu.patil25No ratings yet
- Mechanisms for Reliable Distributed Real-Time Operating Systems: The Alpha KernelFrom EverandMechanisms for Reliable Distributed Real-Time Operating Systems: The Alpha KernelNo ratings yet
- JProfiler ManualDocument246 pagesJProfiler ManualbakaraviNo ratings yet
- UmlDocument10 pagesUmlJairo R Patiño JNo ratings yet
- Mobile App Development - A Detailed GuideDocument33 pagesMobile App Development - A Detailed GuideChristina D OsbournNo ratings yet
- Cheat Sheet OracleDocument1 pageCheat Sheet OraclePranav TanejaNo ratings yet
- Using External Data Integration Services R12Document89 pagesUsing External Data Integration Services R12Felipe GutiérrezNo ratings yet
- IBM WebSphere Adapter For SAP Software 7.5 QSSDocument410 pagesIBM WebSphere Adapter For SAP Software 7.5 QSSPeter PipaNo ratings yet
- WelcomeDocument18 pagesWelcomeDILJITH D SNo ratings yet
- Halbedel Horia Virtualization of Communication System and Memory Stacks in An Automotive ProjectDocument48 pagesHalbedel Horia Virtualization of Communication System and Memory Stacks in An Automotive ProjectHoria HalbedelNo ratings yet
- Selecting Nodes: Axis, Node Test, Predicate, and Function. You Might Be Wondering Where They Come Into The PicDocument17 pagesSelecting Nodes: Axis, Node Test, Predicate, and Function. You Might Be Wondering Where They Come Into The PicJeric CaberNo ratings yet
- APPLETDocument15 pagesAPPLETKousik mannaNo ratings yet
- Data Science Notes - TutorialsDuniyaDocument59 pagesData Science Notes - TutorialsDuniyaSREEJITH S NAIRNo ratings yet
- Teradata Online TrainingDocument10 pagesTeradata Online TrainingcosmosonlinetrainingNo ratings yet
- TDD Ebook Sample - 123Document317 pagesTDD Ebook Sample - 123Everton Mateus FernandesNo ratings yet
- Chapter 2Document58 pagesChapter 2SomaticQiNo ratings yet
- S0C4 AbendDocument2 pagesS0C4 AbendRammurthyNo ratings yet
- VB A String Cheat SheetDocument2 pagesVB A String Cheat SheetNaren BurraNo ratings yet
- Testing Tools PDFDocument4 pagesTesting Tools PDFRajesh DoradlaNo ratings yet
- PEP Yearbook MethodologyDocument5 pagesPEP Yearbook MethodologySneha ChiliveryNo ratings yet
- Web IDE Fullstack PresentationDocument24 pagesWeb IDE Fullstack PresentationDiêgo SilvaNo ratings yet
- Farooq Ahmed: Final Year ProjectDocument1 pageFarooq Ahmed: Final Year ProjectAmmarNo ratings yet
- Python - QuizizzDocument4 pagesPython - Quizizzsomaben26No ratings yet
- CPP Project FinalDocument17 pagesCPP Project FinalYashNo ratings yet
- IPD - SQL ServerDocument61 pagesIPD - SQL ServerAbul Hasanat SekhNo ratings yet
- Coding Unit Plan LT Tracking Hex 1Document2 pagesCoding Unit Plan LT Tracking Hex 1Lisa BejaranoNo ratings yet
- Intership BKKDocument33 pagesIntership BKKBk BalajiNo ratings yet
- Zcustomer Link Check ReportDocument3 pagesZcustomer Link Check ReportnstomarNo ratings yet
- (SOLVED) Autologin XfceDocument7 pages(SOLVED) Autologin XfcemancangkulNo ratings yet
- 22415-2019-Winter-Model-Answer-Paper (Msbte Study Resources)Document23 pages22415-2019-Winter-Model-Answer-Paper (Msbte Study Resources)Aditya MhaisaleNo ratings yet
- 1466566655microcont PDFDocument688 pages1466566655microcont PDFeduardoquijada100% (1)
- Assignment IIIDocument9 pagesAssignment IIIarkamukherjee4921100% (1)