You might also like
- Noise Fundamentals ExplainedDocument101 pagesNoise Fundamentals ExplainedMagNo ratings yet
- Bandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer SystemsDocument11 pagesBandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer Systemssundari_muraliNo ratings yet
- Phase NoiseDocument4 pagesPhase NoisetranthinhamNo ratings yet
- Modern Electronic Communication (PDFDrive - Com) Oscillator Question Chapter1Document6 pagesModern Electronic Communication (PDFDrive - Com) Oscillator Question Chapter1jeanne pauline cruz0% (1)
- Signal Digitization in DSPDocument5 pagesSignal Digitization in DSPegaupc2123No ratings yet
- The EMI-Receiver According To CISPR 16-1-1Document16 pagesThe EMI-Receiver According To CISPR 16-1-1Alberto AngeliciNo ratings yet
- One-Man RF Power Flux Basic Measurements With A Spectrum Analyzer Rohde&SchwarzDocument16 pagesOne-Man RF Power Flux Basic Measurements With A Spectrum Analyzer Rohde&SchwarzJohn Bofarull GuixNo ratings yet
- C. Data Specifications: Svan 957 User ManualDocument25 pagesC. Data Specifications: Svan 957 User Manualnm2007kNo ratings yet
- Measuring Spurious Emissions of GSM TransmittersDocument8 pagesMeasuring Spurious Emissions of GSM Transmittersazr33mNo ratings yet
- Elp 311Document9 pagesElp 311Srijan SinghNo ratings yet
- RF BasicsDocument51 pagesRF BasicsIrshad HaqNo ratings yet
- Eet368 Homework #2 Key: 16 Points Total (1 Per Question) - All Work Must Be Shown or No Credit IsDocument3 pagesEet368 Homework #2 Key: 16 Points Total (1 Per Question) - All Work Must Be Shown or No Credit IsJustin Acuña DungogNo ratings yet
- MT-008 Tutorial: Converting Oscillator Phase Noise To Time JitterDocument10 pagesMT-008 Tutorial: Converting Oscillator Phase Noise To Time JitterAustin ShiNo ratings yet
- Acoustic Projector Using Directivity ControllableDocument5 pagesAcoustic Projector Using Directivity ControllableClaudio MirettiNo ratings yet
- Pf-115 2-Way Vented Loudspeaker SystemDocument2 pagesPf-115 2-Way Vented Loudspeaker Systemnash1929No ratings yet
- Review1 96Document45 pagesReview1 96Vasya PupkinNo ratings yet
- RF DesignDocument17 pagesRF Designoht993No ratings yet
- Das K3 Data Tecnica02Document0 pagesDas K3 Data Tecnica02Enzo CeballosNo ratings yet
- Analog and Sampled Time Domain Plot Sampled Signal Frequency PlotDocument6 pagesAnalog and Sampled Time Domain Plot Sampled Signal Frequency PlotSyed Baqar HussainNo ratings yet
- Design of Low-Noise Preamplifier For Medical Diagnostic SystemDocument4 pagesDesign of Low-Noise Preamplifier For Medical Diagnostic Systemb_makkiabadiNo ratings yet
- Topic 8 Lecture: VN XN N VNDocument15 pagesTopic 8 Lecture: VN XN N VNshutup121No ratings yet
- EC-503 Analog Communication Systems Exam QuestionsDocument4 pagesEC-503 Analog Communication Systems Exam QuestionsRavindra KumarNo ratings yet
- CNS-ST1.1Document8 pagesCNS-ST1.1Achilles AldaveNo ratings yet
- CMOS Mixed Signal Circuit Design by Jacob BakerDocument180 pagesCMOS Mixed Signal Circuit Design by Jacob BakerSharath Sogi0% (1)
- Planning of Line-Of-Sight Radio Relay Systems - Part 2Document84 pagesPlanning of Line-Of-Sight Radio Relay Systems - Part 2aezzatNo ratings yet
- Calibration of Ultrasonic Flaw Detection SystemDocument3 pagesCalibration of Ultrasonic Flaw Detection SystemalzakiNo ratings yet
- 01 (Quex)Document5 pages01 (Quex)JHOEMEL TANGONo ratings yet
- Anti Ali ADocument17 pagesAnti Ali Asaske969No ratings yet
- Noise Removal: Sinusoidal Signals and FrequencyDocument12 pagesNoise Removal: Sinusoidal Signals and Frequencykatrina99No ratings yet
- SV104is User Manual App CDocument40 pagesSV104is User Manual App CAndresNo ratings yet
- Linear Amplifier and Single Sideband TransmissionDocument26 pagesLinear Amplifier and Single Sideband TransmissionmatmatijamelNo ratings yet
- AN10062 Phase Noise Measurement Guide For OscillatorsDocument16 pagesAN10062 Phase Noise Measurement Guide For Oscillatorspranan100% (1)
- KoehlerDocument8 pagesKoehlerjlnhabNo ratings yet
- Chapter 21Document4 pagesChapter 21Paulo AzañeroNo ratings yet
- 6oghz: Optical Millimetre-Wave Generation and Transmission Experiments For Mobile Band CommunicationsDocument3 pages6oghz: Optical Millimetre-Wave Generation and Transmission Experiments For Mobile Band CommunicationsMandeep SinghNo ratings yet
- Lowest Noise Zero Drift AmplifierDocument8 pagesLowest Noise Zero Drift AmplifierAmarnath M DamodaranNo ratings yet
- Adaptive vs Nonadaptive Filters for ECG Noise ReductionDocument5 pagesAdaptive vs Nonadaptive Filters for ECG Noise ReductionnathaliaNo ratings yet
- EEE3086F Prelab2 SimulinkDocument4 pagesEEE3086F Prelab2 SimulinkCarlos ZeballosNo ratings yet
- Paul Harden Handy Oscilloscope 2Document4 pagesPaul Harden Handy Oscilloscope 2AlexLVNo ratings yet
- HW1 ModDocument1 pageHW1 ModLucho GutierrezNo ratings yet
- Cushman Model CE-3 FM Communication Monitor Manual, 1968.Document139 pagesCushman Model CE-3 FM Communication Monitor Manual, 1968.Bob Laughlin, KWØRL100% (6)
- S A A O N I S C A C: Imulation ND Nalysis F Oise N Witched Apacitor Mplifier IrcuitsDocument4 pagesS A A O N I S C A C: Imulation ND Nalysis F Oise N Witched Apacitor Mplifier IrcuitsSai KrishnaNo ratings yet
- Am Radio ReceiverDocument5 pagesAm Radio Receiver808Sadyojata SahuNo ratings yet
- How To Correctly Use Spectrum Analyzers For EMC Pre-Compliance TestsDocument22 pagesHow To Correctly Use Spectrum Analyzers For EMC Pre-Compliance TestsAndrzej RogalaNo ratings yet
- Tensilica ReportDocument11 pagesTensilica Reportapi-301719207No ratings yet
- Audio Characterization Report For The DS1802 Dual Digital Audio PotentiometerDocument16 pagesAudio Characterization Report For The DS1802 Dual Digital Audio Potentiometerjnax101No ratings yet
- Design of Ultra Low Noise AmplifiersDocument10 pagesDesign of Ultra Low Noise AmplifiersRakotomalala Mamy TianaNo ratings yet
- Review: Assess The Microphone and Data Acquisition System Provided by SonitusDocument14 pagesReview: Assess The Microphone and Data Acquisition System Provided by SonitusTina RosalesNo ratings yet
- Documento CNR CiscoDocument17 pagesDocumento CNR CiscoCarlos A. Galeano A.No ratings yet
- Nec3109 - Española - Experiment No. 1Document12 pagesNec3109 - Española - Experiment No. 1Jupiter EspañolaNo ratings yet
- Acoustic MeasurementsDocument14 pagesAcoustic MeasurementsShivjyoti MohapatraNo ratings yet
- Electronic Project CWDocument18 pagesElectronic Project CWssyxz10No ratings yet
- Resonance Enhancement in Laser-Produced Plasmas: Concepts and ApplicationsFrom EverandResonance Enhancement in Laser-Produced Plasmas: Concepts and ApplicationsNo ratings yet
- Electronics 3 Checkbook: The Checkbooks SeriesFrom EverandElectronics 3 Checkbook: The Checkbooks SeriesRating: 5 out of 5 stars5/5 (1)
- Audio IC Circuits Manual: Newnes Circuits Manual SeriesFrom EverandAudio IC Circuits Manual: Newnes Circuits Manual SeriesRating: 5 out of 5 stars5/5 (1)
- The Acoustic Emission Monitoring System of Aboveground Storage TanksDocument8 pagesThe Acoustic Emission Monitoring System of Aboveground Storage TanksGonzalo TelleríaNo ratings yet
- The Use of High Resolution Magnetic Flux Leakage For Life PredictionDocument6 pagesThe Use of High Resolution Magnetic Flux Leakage For Life PredictionJorge PerdigonNo ratings yet
- Examination of Ae Wave Propagation Routes in A Small Model TankDocument6 pagesExamination of Ae Wave Propagation Routes in A Small Model TankGonzalo TelleríaNo ratings yet
- 07Document6 pages07Gonzalo TelleríaNo ratings yet
- Inspection of LPG Vessels With Ae Examination: P. Tscheliesnig and G. Schauritsch TÜV Austria, Wien, AustriaDocument6 pagesInspection of LPG Vessels With Ae Examination: P. Tscheliesnig and G. Schauritsch TÜV Austria, Wien, AustriaGonzalo TelleríaNo ratings yet
- Improved Source Location Methods For Pressure VesselsDocument7 pagesImproved Source Location Methods For Pressure VesselsGonzalo TelleríaNo ratings yet
- 18 180Document9 pages18 180Gonzalo TelleríaNo ratings yet
- The Use of High Resolution Magnetic Flux Leakage For Life PredictionDocument6 pagesThe Use of High Resolution Magnetic Flux Leakage For Life PredictionJorge PerdigonNo ratings yet
- Detecting Cracks with up to 100% Probability Using Acoustic Emission TechniqueDocument8 pagesDetecting Cracks with up to 100% Probability Using Acoustic Emission TechniqueGonzalo TelleríaNo ratings yet
- Acoustic Emission Testing On Flat-Bottomed Storage TanksDocument9 pagesAcoustic Emission Testing On Flat-Bottomed Storage TanksGonzalo TelleríaNo ratings yet
- 07Document6 pages07Gonzalo TelleríaNo ratings yet
- Monitoring Erosion-Corrosion in Carbon Steel Elbow Using Acoustic Emission TechniqueDocument12 pagesMonitoring Erosion-Corrosion in Carbon Steel Elbow Using Acoustic Emission TechniqueGonzalo TelleríaNo ratings yet
- Improved Noise Discrimination For An Ammonia Tank AE Test: Specialist NDT ServicesDocument28 pagesImproved Noise Discrimination For An Ammonia Tank AE Test: Specialist NDT ServicesGonzalo TelleríaNo ratings yet
- Inspection of Pressure Vessels Used in Refrigeration and Air Conditionning SystemsDocument6 pagesInspection of Pressure Vessels Used in Refrigeration and Air Conditionning SystemsGonzalo TelleríaNo ratings yet
- Use of Acoustic Emission To Detect Localised Corrosion Philosophy of Industrial Use, Illustrated With Real ExamplesDocument6 pagesUse of Acoustic Emission To Detect Localised Corrosion Philosophy of Industrial Use, Illustrated With Real ExamplesGonzalo TelleríaNo ratings yet
- FDocument10 pagesFdelvalle guilarteNo ratings yet
- Cumulative Contents: J. of Acoustic Emission, Volumes 1 - 30, 1982 - 2012Document67 pagesCumulative Contents: J. of Acoustic Emission, Volumes 1 - 30, 1982 - 2012Gonzalo TelleríaNo ratings yet
- Improved Source Location Methods For Pressure VesselsDocument7 pagesImproved Source Location Methods For Pressure VesselsGonzalo TelleríaNo ratings yet
- JAE Contents Vol 1 30Document9 pagesJAE Contents Vol 1 30Gonzalo TelleríaNo ratings yet
- Acoustic Emission From Rust in Stress Corrosion Cracking: Hideo Cho and Mikio TakemotoDocument12 pagesAcoustic Emission From Rust in Stress Corrosion Cracking: Hideo Cho and Mikio TakemotoGonzalo TelleríaNo ratings yet
- A Simple Method To Compare The Sensitivity of Different Ae Sensors For Tank Floor TestingDocument8 pagesA Simple Method To Compare The Sensitivity of Different Ae Sensors For Tank Floor TestingGonzalo TelleríaNo ratings yet
- Cumulative Contents: J. of Acoustic Emission, Volumes 1 - 30, 1982 - 2012Document67 pagesCumulative Contents: J. of Acoustic Emission, Volumes 1 - 30, 1982 - 2012Gonzalo TelleríaNo ratings yet
- Acoustic Emission Method For Solving Problems in DDocument10 pagesAcoustic Emission Method For Solving Problems in DGonzalo TelleríaNo ratings yet
- Acoustic Emission Testing On Flat-Bottomed Storage TanksDocument9 pagesAcoustic Emission Testing On Flat-Bottomed Storage TanksGonzalo TelleríaNo ratings yet
- Prisma T Broch FWDocument4 pagesPrisma T Broch FWGonzalo TelleríaNo ratings yet
- Acoustic Emission Testing On Flat-Bottomed Storage TanksDocument9 pagesAcoustic Emission Testing On Flat-Bottomed Storage TanksGonzalo TelleríaNo ratings yet
- Acoustic Emission From Rust in Stress Corrosion Cracking: Hideo Cho and Mikio TakemotoDocument12 pagesAcoustic Emission From Rust in Stress Corrosion Cracking: Hideo Cho and Mikio TakemotoGonzalo TelleríaNo ratings yet
- Evaluation of acoustic emission inspection for oil tank floor thicknessDocument8 pagesEvaluation of acoustic emission inspection for oil tank floor thicknessGonzalo TelleríaNo ratings yet
- API 586 Meeting Agenda Fall 2016Document2 pagesAPI 586 Meeting Agenda Fall 2016Gonzalo TelleríaNo ratings yet
- IMG - 0092 PSME Code 2012 90Document1 pageIMG - 0092 PSME Code 2012 90Bugoy2023No ratings yet
- Soal Big A Tukpd 2011-2012 RevisiDocument5 pagesSoal Big A Tukpd 2011-2012 RevisiTriana WatiNo ratings yet
- Application of Operations Research in Banking FinanceDocument13 pagesApplication of Operations Research in Banking FinanceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- #4 Types of Food, Ingredients and Procedures.Document7 pages#4 Types of Food, Ingredients and Procedures.Peter GonzálezNo ratings yet
- Team Handball SG Pratt v2Document2 pagesTeam Handball SG Pratt v2Peter StonesNo ratings yet
- Design Basis Events FOR Pressurised Heavy Water Reactor: Aerb Safety Guide No - Aerb/Sg/D-5Document36 pagesDesign Basis Events FOR Pressurised Heavy Water Reactor: Aerb Safety Guide No - Aerb/Sg/D-5Anuj DeoNo ratings yet
- The Indonesian Food Processing Industry (Final)Document48 pagesThe Indonesian Food Processing Industry (Final)patalnoNo ratings yet
- Sektion Installation Guide Fy21 Web ADocument16 pagesSektion Installation Guide Fy21 Web AmroliverridleyNo ratings yet
- The Effects of Oar-Shaft Stiffness andDocument9 pagesThe Effects of Oar-Shaft Stiffness andValentina DiamanteNo ratings yet
- Audit Reveals Optimization Opportunities for Cement Ball Mill SystemDocument19 pagesAudit Reveals Optimization Opportunities for Cement Ball Mill SystemVijay Bhan100% (2)
- Minicap FTC260, FTC262: Technical InformationDocument20 pagesMinicap FTC260, FTC262: Technical InformationAmanda PorterNo ratings yet
- Safety Data Sheet Permatreat® Pc-191T: Section: 1. Product and Company IdentificationDocument9 pagesSafety Data Sheet Permatreat® Pc-191T: Section: 1. Product and Company IdentificationMajd DraidiNo ratings yet
- ImmortalDocument4 pagesImmortalMaNithyaVishalanandaNo ratings yet
- Naval Noise Psycho-Acoustic Backpropagation NNDocument12 pagesNaval Noise Psycho-Acoustic Backpropagation NNSilvia FlorentinaNo ratings yet
- House Service Connection NEW BSR 2020-1Document1 pageHouse Service Connection NEW BSR 2020-1Deshraj BairwaNo ratings yet
- Introduction To The Philosophy of Science First PartDocument138 pagesIntroduction To The Philosophy of Science First PartChandra Sekhar Sahu100% (1)
- Oral Hygiene: Presented By: Anis Anis Andreas KyriakidisDocument60 pagesOral Hygiene: Presented By: Anis Anis Andreas Kyriakidislenami_91No ratings yet
- Explore the Precambrian EraDocument3 pagesExplore the Precambrian EraArjay CarolinoNo ratings yet
- 2008 Company Performance 2008 Company Performance & 2009 Business Outlook & 2009 Business OutlookDocument30 pages2008 Company Performance 2008 Company Performance & 2009 Business Outlook & 2009 Business OutlookKakasNo ratings yet
- WK-3508F IPTV Gateway DatasheetDocument7 pagesWK-3508F IPTV Gateway DatasheetComunidad Tecnolibre.netNo ratings yet
- Manual CastingDocument64 pagesManual CastingDjRacksNo ratings yet
- Estudio CarmenaDocument11 pagesEstudio CarmenaAlfredo BalcázarNo ratings yet
- CrankDocument9 pagesCrankKresna BayuNo ratings yet
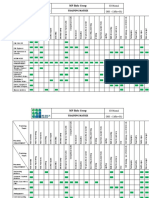
- MP Birla Group: Training MatrixDocument3 pagesMP Birla Group: Training MatrixAprilia kusumaNo ratings yet
- Network 18Document44 pagesNetwork 18Ashok ThakurNo ratings yet
- Qanooneislamorcu 00 JafaDocument646 pagesQanooneislamorcu 00 JafaawNo ratings yet
- SRWM M.PDocument34 pagesSRWM M.PAmare BayeNo ratings yet
- Megger FORMDocument1 pageMegger FORMCOSMOPOLITAN M&ENo ratings yet
- PV Elite ResultDocument18 pagesPV Elite ResultVeny MartianiNo ratings yet