You might also like
- Actuators and Output Devices: Chapter B-3Document24 pagesActuators and Output Devices: Chapter B-3stolehaNo ratings yet
- Pneumatic Actuators: Linear and Rotary Motion TypesDocument55 pagesPneumatic Actuators: Linear and Rotary Motion TypesNoor UL AaienNo ratings yet
- Welding Machine Project Report FinalDocument44 pagesWelding Machine Project Report FinalJAYAPRABHAKARAN N NNo ratings yet
- 6 - HydrauliccylindersDocument29 pages6 - HydrauliccylindersMohamed ZahranNo ratings yet
- Hydraulic CylindersDocument10 pagesHydraulic CylindersBrandon HaNo ratings yet
- Lecture 37PNEUMATICS ACTUATORSDocument43 pagesLecture 37PNEUMATICS ACTUATORSpratapy234No ratings yet
- PNEUMATIC CONTROLS PRESENTATIONDocument147 pagesPNEUMATIC CONTROLS PRESENTATIONmetroroadNo ratings yet
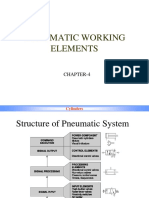
- Pneumatic Working Elements: Chapter-4Document56 pagesPneumatic Working Elements: Chapter-4Venkat Preethi ANo ratings yet
- 01 Compressors 06Document14 pages01 Compressors 06scarpredator5No ratings yet
- Pneumatic Cylinder Types: Single, Double & Reverse ActingDocument10 pagesPneumatic Cylinder Types: Single, Double & Reverse ActingifyNo ratings yet
- Actuators 1Document16 pagesActuators 1DIEGOsemNo ratings yet
- Free Piston Power Pack2003-01-3277Document7 pagesFree Piston Power Pack2003-01-3277zz zzzNo ratings yet
- Da-Voc-Bmc 6.1.3 MDocument8 pagesDa-Voc-Bmc 6.1.3 MthompsonNo ratings yet
- Experimental and Computational Studies On Oil Injected Twin-Screw CompressorDocument195 pagesExperimental and Computational Studies On Oil Injected Twin-Screw CompressorIhsan AhmedNo ratings yet
- Analysis of Flow Through Converget-Divergent NozzleDocument57 pagesAnalysis of Flow Through Converget-Divergent Nozzleharsha_tejaharshaNo ratings yet
- S P Rotating CylinderDocument16 pagesS P Rotating CylinderKumar SanthanamNo ratings yet
- Air EngineDocument46 pagesAir EngineANAND KRISHNANNo ratings yet
- Advantages of Hydraulic CranesDocument37 pagesAdvantages of Hydraulic Craneskunbasukiadi86% (7)
- Main components of steam turbineDocument31 pagesMain components of steam turbineYaser AkarNo ratings yet
- Fig. 2.1: Bending TerminologyDocument6 pagesFig. 2.1: Bending TerminologyeshwariNo ratings yet
- Air CompressorsDocument41 pagesAir CompressorsAnkitNo ratings yet
- Chapter 3 - Pneumatic ActuatorsDocument10 pagesChapter 3 - Pneumatic ActuatorserickaNo ratings yet
- Hydraulic Cylinders EN-AUDocument24 pagesHydraulic Cylinders EN-AUfornelasNo ratings yet
- Introduction Reciprocating CompressorDocument6 pagesIntroduction Reciprocating CompressorHirak BhattacharyaNo ratings yet
- Make Piston ModelDocument8 pagesMake Piston ModelSaurabh AwacharNo ratings yet
- 5 7-PumpsDocument46 pages5 7-PumpsMohamed Rafeek GhaniNo ratings yet
- TC Manual Fluid PumpsDocument32 pagesTC Manual Fluid Pumpsvickers100% (1)
- Actuators: Actuators My Notes and CalculationsDocument16 pagesActuators: Actuators My Notes and CalculationsMohamed RashedNo ratings yet
- 01 Piston Actuator PneumaticDocument2 pages01 Piston Actuator PneumaticRandom StuffsNo ratings yet
- CH3 Ibl ADocument70 pagesCH3 Ibl Anoorr66No ratings yet
- Renewable M5 Ktunotes - inDocument65 pagesRenewable M5 Ktunotes - inADR20ME024 BINNU THOMASNo ratings yet
- Single Acting Cylinder GuideDocument3 pagesSingle Acting Cylinder GuidemehtahemalNo ratings yet
- Unit Ii PhiDocument33 pagesUnit Ii PhiAnshul jainNo ratings yet
- Edusat Presentation On Pneumatics5Document147 pagesEdusat Presentation On Pneumatics5metroroadNo ratings yet
- Nitro Shock AbsorberDocument15 pagesNitro Shock Absorberpurusottam nandaNo ratings yet
- Pumps Types and ComponentsDocument222 pagesPumps Types and Componentsarkan1976No ratings yet
- Pneumatic Rod Bending Machine Project ReportDocument3 pagesPneumatic Rod Bending Machine Project ReportJeyakumar NNo ratings yet
- Design and Development of Pneumatic Powered Hacksaw MachineDocument5 pagesDesign and Development of Pneumatic Powered Hacksaw MachineJeya KumarNo ratings yet
- Centrifugal & Axial Compressor - ConstructionDocument16 pagesCentrifugal & Axial Compressor - ConstructionNikesh100% (3)
- Elastic Pressure TransducersDocument7 pagesElastic Pressure TransducersKrypton HalideNo ratings yet
- Scavenging & TurbochargingDocument25 pagesScavenging & TurbochargingSayem kaifNo ratings yet
- Centrifugal Pumps TRGDocument35 pagesCentrifugal Pumps TRGsudhakarrajam2002No ratings yet
- Pneumatic Hacksaw MachineDocument41 pagesPneumatic Hacksaw MachineMahesh KumarNo ratings yet
- Ice PPT 2021 30.09.2021Document123 pagesIce PPT 2021 30.09.2021yoleber398No ratings yet
- 4 ReportDocument89 pages4 ReportRajesh KesapragadaNo ratings yet
- Venky LSDocument33 pagesVenky LSSyed NadeemNo ratings yet
- What Is Piston How Does A Piston WorkDocument15 pagesWhat Is Piston How Does A Piston WorkRony henneryNo ratings yet
- Pneumatic Actuators and Cylinder TypesDocument41 pagesPneumatic Actuators and Cylinder Typesuthman98No ratings yet
- Shock AbsorbersDocument6 pagesShock AbsorbersJohpet Minimo100% (1)
- Hydraulics & Pneumatics: LECTURE #Document17 pagesHydraulics & Pneumatics: LECTURE #Farah HumaNo ratings yet
- Proces ValveDocument98 pagesProces Valvehimansh871100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- Steam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversFrom EverandSteam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversRating: 5 out of 5 stars5/5 (2)
- Cen 01 2019 RRB NTPC RrbonlinegovinDocument71 pagesCen 01 2019 RRB NTPC RrbonlinegovinIndia Jobs Seeker75% (8)
- Books and Authors Current Affairs - Capsule in PDFDocument7 pagesBooks and Authors Current Affairs - Capsule in PDFRitam KumarNo ratings yet
- Module 4 Drives and Mechanisms Elements of CNC Machine Tools: Electric MotorsDocument47 pagesModule 4 Drives and Mechanisms Elements of CNC Machine Tools: Electric MotorsDhanish KumarNo ratings yet
- Module 4 Drives and Mechanisms Elements of CNC Machine Tools: Electric MotorsDocument47 pagesModule 4 Drives and Mechanisms Elements of CNC Machine Tools: Electric MotorsDhanish KumarNo ratings yet
- Advanced Photoshop Magazine 121-2014 PDFDocument100 pagesAdvanced Photoshop Magazine 121-2014 PDFgusoneNo ratings yet
- 1302 FF6SF6DosingMachine 0Document3 pages1302 FF6SF6DosingMachine 0Fawzi ChakirNo ratings yet
- Honda General Pursone Engine Gx120k1Document215 pagesHonda General Pursone Engine Gx120k1Ricky VilNo ratings yet
- Sap Abap Programming SyllabusDocument5 pagesSap Abap Programming SyllabusSURAJ KUMAR SAHUNo ratings yet
- Your One Source In Water Systems Product Catalog 2008Document44 pagesYour One Source In Water Systems Product Catalog 2008Gerry Dan ChanliongcoNo ratings yet
- Syabas Water ApplicationDocument7 pagesSyabas Water ApplicationKen Chia0% (1)
- HVX200 LentesDocument2 pagesHVX200 Lentespink2004No ratings yet
- DTMF Proximity DetectorDocument1 pageDTMF Proximity DetectorAlagappan ArunachalamNo ratings yet
- Strategic Human Resource Development I SlidesDocument26 pagesStrategic Human Resource Development I SlidesAbhiman Behera50% (2)
- CV Template ReceptionistDocument2 pagesCV Template ReceptionistMuhammad Waqas LatifNo ratings yet
- SAIC-A-2009 Rev 2Document5 pagesSAIC-A-2009 Rev 2ரமேஷ் பாலக்காடுNo ratings yet
- 1 s2.0 S0950061822007966 MainDocument20 pages1 s2.0 S0950061822007966 MainmohammadNo ratings yet
- ADL 01 Assignment ADocument5 pagesADL 01 Assignment Aversha2950% (2)
- Fie's Newton LawDocument26 pagesFie's Newton LawNida'ul KhasanahNo ratings yet
- An Introduction To Marketing Research by SmithDocument448 pagesAn Introduction To Marketing Research by SmithKali Das100% (1)
- UA Checkliste VPD Verfahren enDocument3 pagesUA Checkliste VPD Verfahren enBharadwaja ReddyNo ratings yet
- ZZZXDocument14 pagesZZZXJay R DenostaNo ratings yet
- Images and Color: Summary: SourcesDocument18 pagesImages and Color: Summary: Sourcesethiopia hagereNo ratings yet
- GRT8100 Product Guide Imperial PDFDocument32 pagesGRT8100 Product Guide Imperial PDFSijumon sijuNo ratings yet
- Odometer Recording StrategiesDocument2 pagesOdometer Recording StrategiesFroilan CaoleNo ratings yet
- TM 1001 AVEVA Plant 12 1 PDMS Foundations Rev 3 0 PDFDocument153 pagesTM 1001 AVEVA Plant 12 1 PDMS Foundations Rev 3 0 PDFPolarogramaNo ratings yet
- Bs1030 BrochureDocument2 pagesBs1030 BrochuremgvuleNo ratings yet
- Lecture 4-Unit 1 Lesson 4Document23 pagesLecture 4-Unit 1 Lesson 4Jameel MalikNo ratings yet
- How to ping NodeB and RNC using RTN transmission IPDocument14 pagesHow to ping NodeB and RNC using RTN transmission IPPaulo DembiNo ratings yet
- Comparison of Coaxial CablesDocument1 pageComparison of Coaxial CablesAntonis IsidorouNo ratings yet
- Clear IM Inventory DifferencesDocument11 pagesClear IM Inventory DifferencesnguyencaohuygmailNo ratings yet
- Tutorial DataGeosis Office EspañolmtdDocument205 pagesTutorial DataGeosis Office Españolmtdramm70No ratings yet
- 0751 VICTAULIC in Mechanical PipingDocument17 pages0751 VICTAULIC in Mechanical PipingsyafiqNo ratings yet
- Model A360 CatalogDocument12 pagesModel A360 CatalogThomas StempienNo ratings yet
- Top Issues List - V2Document110 pagesTop Issues List - V2Lam HoangNo ratings yet