You might also like
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- Ci02td 2Document5 pagesCi02td 2Samy BoujihaNo ratings yet
- DS2 PDFDocument8 pagesDS2 PDFAbdelilah Elmesbahi100% (1)
- TD 09 - Cinématique Analytique - Dérivation VectorielleDocument3 pagesTD 09 - Cinématique Analytique - Dérivation VectoriellemoulyNo ratings yet
- 32 Fermeture Geo ExercicesDocument4 pages32 Fermeture Geo Exerciceslaalai faicelNo ratings yet
- Mecanismes ExercicesDocument6 pagesMecanismes ExercicesOumaima BK0% (1)
- TD 13 - Comportement Cinématique Des SystèmesDocument9 pagesTD 13 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocument4 pagesTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- TD Révision Cinematique Du SolideDocument8 pagesTD Révision Cinematique Du SolideRomain MarroNo ratings yet
- Exercices Cinmatique Trajectoires Camion Benne Chariot Portuaire CorrigDocument2 pagesExercices Cinmatique Trajectoires Camion Benne Chariot Portuaire Corrigspectrum66100% (3)
- TD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDocument4 pagesTD 19 - Loi Entrée-Sortie Par Fermeture CinématiqueDrisse Achar60% (5)
- TD 3 StatiqueDocument18 pagesTD 3 Statiquefoufoua100% (1)
- TD1 PFS 17 18Document4 pagesTD1 PFS 17 18Yassine Bouchatta50% (2)
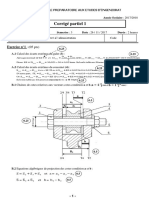
- Corrigé Partiel 1-2018Document4 pagesCorrigé Partiel 1-2018Ramdane BoulahiaNo ratings yet
- TD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 Corrigé - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationMönsîeur Abd NourNo ratings yet
- TD 16 - Liaisons - Schéma CinématiqueDocument4 pagesTD 16 - Liaisons - Schéma Cinématiquebhs channelNo ratings yet
- TD 23 - Comportement Statique Des Systèmes DarorDocument9 pagesTD 23 - Comportement Statique Des Systèmes Darorbhs channelNo ratings yet
- Chaines de Solides - Comportement CinématiqueDocument8 pagesChaines de Solides - Comportement CinématiqueAbdelali YacoubiNo ratings yet
- Cinématique Des Solides - TD1Document7 pagesCinématique Des Solides - TD1Brahim Achayfad80% (5)
- Cinematique GraphiqueDocument5 pagesCinematique GraphiqueRey divino MoukouaNo ratings yet
- TD 17 - Lois Entrée-Sortie en Position Et en VitesseDocument7 pagesTD 17 - Lois Entrée-Sortie en Position Et en Vitessebhs channelNo ratings yet
- TD 10 - Comportement Cinématique Des SystèmesDocument4 pagesTD 10 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- TD 3 CinemaTiqueDocument15 pagesTD 3 CinemaTiqueMohamed OuladNo ratings yet
- TD Liaisons - Schema Cinematique Corrige - 2Document6 pagesTD Liaisons - Schema Cinematique Corrige - 2Ali OuahmadNo ratings yet
- Cinématique 2022Document51 pagesCinématique 2022said houmairiNo ratings yet
- TD Chaines de SolidesDocument2 pagesTD Chaines de Solidessoufiane8fka100% (2)
- Réducteur À Arbre CreuxDocument10 pagesRéducteur À Arbre CreuxBouker Mohamed100% (1)
- Cinématique Des Solides 2 TDDocument3 pagesCinématique Des Solides 2 TDelkhouddar yassineNo ratings yet
- (Mam) (TD) Modelisation Des Actions MecaniquesDocument2 pages(Mam) (TD) Modelisation Des Actions MecaniquesMATOUMBA PAULIN100% (1)
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyNo ratings yet
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddineNo ratings yet
- Theorie de Mecanismes 2021 - Part2Document15 pagesTheorie de Mecanismes 2021 - Part2Amine LaouitiNo ratings yet
- CI4 TD64 C Table-BasculanteDocument3 pagesCI4 TD64 C Table-BasculanteAbdelali Yacoubi33% (3)
- Chap3 Hyperstatisme Et Mobilité Des MécanismesDocument21 pagesChap3 Hyperstatisme Et Mobilité Des Mécanismesmamadou diopNo ratings yet
- Sujets de Méca Géné 2009Document110 pagesSujets de Méca Géné 2009souheil_sou100% (4)
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteDocument8 pagesTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmaneNo ratings yet
- Cours - Cinématique Comprimé PDFDocument42 pagesCours - Cinématique Comprimé PDFMohammed Afkir100% (2)
- TD 8Document4 pagesTD 8Niane Møùstãphà BãssîrôūNo ratings yet
- TD 17 Corrigé - Liaisons ÉquivalentesDocument6 pagesTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- COURS Théorie Des Mécanismes PDFDocument5 pagesCOURS Théorie Des Mécanismes PDFMohamed NaciriNo ratings yet
- Schéma CinématiqueDocument1 pageSchéma Cinématiquelephilo57No ratings yet
- TD Statique CinématiqueDocument5 pagesTD Statique CinématiqueAhmed fattoumNo ratings yet
- Statique Du SolideDocument55 pagesStatique Du SolideZiko100% (1)
- TD 4 Loi Entrée Sortie Par Fermeture CinématiqueDocument2 pagesTD 4 Loi Entrée Sortie Par Fermeture CinématiqueAb DouNo ratings yet
- S623.2 Comportement Des MecanismesDocument3 pagesS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- TD de Mecanique Generale ISET Nabeul L1Document18 pagesTD de Mecanique Generale ISET Nabeul L1Adel ZitouniNo ratings yet
- Regulateur Boules Correction CINEMATIQUEDocument6 pagesRegulateur Boules Correction CINEMATIQUEMoustapha Diagne100% (1)
- TD 25 - PFS Résolution Analytique + AM Dans Les Liaisons ParfaitesDocument6 pagesTD 25 - PFS Résolution Analytique + AM Dans Les Liaisons Parfaitesbhs channel100% (1)
- Hyperstatisme Et Mobilité: Liaisons en ParallèleDocument11 pagesHyperstatisme Et Mobilité: Liaisons en ParallèleMohamed OuaggaNo ratings yet
- Efforts Engrenages Denture DroiteDocument2 pagesEfforts Engrenages Denture DroiteŘãnîa SmidaNo ratings yet
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemNo ratings yet
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocument3 pagesCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiNo ratings yet
- DS2 1Document5 pagesDS2 1Braxt MwIra GibecièreNo ratings yet
- Cinématique Colle 1Document3 pagesCinématique Colle 1elkhouddar yassineNo ratings yet
- TSI3 ModelisationDocument12 pagesTSI3 Modelisationlouna yunaNo ratings yet
- 14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFDocument5 pages14 TD Sujet - Torseur Cinétique Et Torseur Dynamique PDFHassanbfk BfkNo ratings yet
- TD 08Document4 pagesTD 08Abdou HamaouiNo ratings yet
- DS3 2Document6 pagesDS3 2ulrich borel tchinda melongNo ratings yet
- IF Energie ER12 Part FR PDFDocument7 pagesIF Energie ER12 Part FR PDFSalas gamerNo ratings yet
- Chapitre IV. Performances Et Cycles Des Turboreacteurs. CopieDocument18 pagesChapitre IV. Performances Et Cycles Des Turboreacteurs. CopiejackNo ratings yet
- 3MOTCOMINTERNE WWW - CoursDocument57 pages3MOTCOMINTERNE WWW - CourshassanNo ratings yet
- Aero - Terprop Moteurs Thermiques PDFDocument21 pagesAero - Terprop Moteurs Thermiques PDFAtif BelaidNo ratings yet
- Chap4 Elaborer Problématique Recherche PDFDocument14 pagesChap4 Elaborer Problématique Recherche PDFMouad MdafaiNo ratings yet
- Int Comb Engines FrenchDocument1 pageInt Comb Engines FrenchEdgard Adán Cieza EstelaNo ratings yet
- Moteurs À Combustion Interne, CombustionDocument120 pagesMoteurs À Combustion Interne, CombustionRalf Lo100% (1)
- Mécanique Ventilatoire PDFDocument8 pagesMécanique Ventilatoire PDFEdgard Adán Cieza EstelaNo ratings yet
- Int Comb Engines FrenchDocument1 pageInt Comb Engines FrenchEdgard Adán Cieza EstelaNo ratings yet
- 3MOTCOMINTERNE WWW - CoursDocument57 pages3MOTCOMINTERNE WWW - CourshassanNo ratings yet
- Nivel Doctorado de Una Tesis de Motores PDFDocument146 pagesNivel Doctorado de Una Tesis de Motores PDFEdgard Adán Cieza EstelaNo ratings yet
- Supportcoursmoteurthermiqueissatsousse2013fin2 130131072719 Phpapp02 PDFDocument105 pagesSupportcoursmoteurthermiqueissatsousse2013fin2 130131072719 Phpapp02 PDFJoão DantasNo ratings yet
- Agitador VerticalDocument2 pagesAgitador VerticalEdgard Adán Cieza EstelaNo ratings yet
- 20 006 30 00FRDocument20 pages20 006 30 00FREdgard Adán Cieza EstelaNo ratings yet
- TD11 Modele Cinematique v2 PDFDocument4 pagesTD11 Modele Cinematique v2 PDFEdgard Adán Cieza EstelaNo ratings yet
- Graines D Acer Palmatum Osakazuki Maillot BonsaiDocument1 pageGraines D Acer Palmatum Osakazuki Maillot BonsaiEdgard Adán Cieza EstelaNo ratings yet
- Eolienne Rapport ProjetDocument26 pagesEolienne Rapport Projetlopir120No ratings yet
- Moteurs v2.0Document4 pagesMoteurs v2.0Edgard Adán Cieza EstelaNo ratings yet
- Eolienne Rapport ProjetDocument26 pagesEolienne Rapport Projetlopir120No ratings yet
- Introscilab FR v0.1 PDFDocument95 pagesIntroscilab FR v0.1 PDFbbaskaranNo ratings yet
- Notions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Document140 pagesNotions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Salma Brb83% (6)
- Transformateurs TPC Pour Reseaux AeriensDocument4 pagesTransformateurs TPC Pour Reseaux AeriensEdgard Adán Cieza EstelaNo ratings yet
- La Mesure Du TempsDocument21 pagesLa Mesure Du TempsEdgard Adán Cieza EstelaNo ratings yet
- 2 Transformateur PDFDocument57 pages2 Transformateur PDFjeffyNo ratings yet
- Feng ShuiDocument13 pagesFeng ShuiEdgard Adán Cieza EstelaNo ratings yet
- La Mesure Du TempsDocument21 pagesLa Mesure Du TempsEdgard Adán Cieza EstelaNo ratings yet
- Notions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Document140 pagesNotions Mecanique Des Fluides. " Riadh BEN HAMOUDA "Salma Brb83% (6)
- Procedure Des Traitement Des Actions Correctives Et PreventivesDocument2 pagesProcedure Des Traitement Des Actions Correctives Et PreventivesAbdelatif Hr100% (1)
- Transmettre Des Données Avec l'URL: Informations Sur Le TutorielDocument10 pagesTransmettre Des Données Avec l'URL: Informations Sur Le TutorielHicham MoutchouNo ratings yet
- 2013 TH18334 Fixot Jean PDFDocument190 pages2013 TH18334 Fixot Jean PDFhubNo ratings yet
- Notice 4010Document58 pagesNotice 4010jalouzNo ratings yet
- Publication 24Document1 pagePublication 24zanazeNo ratings yet
- Micro Swimmer RobotDocument8 pagesMicro Swimmer RobotAlvaroEnriqueQuinterosNo ratings yet
- Rapport de Stage - Administration Réseau Et Dévéloppement WebDocument41 pagesRapport de Stage - Administration Réseau Et Dévéloppement Webnajm3dNo ratings yet
- Outillage Sanitaire - Mesure 2000Document66 pagesOutillage Sanitaire - Mesure 2000Camelia SmahanNo ratings yet
- Serie 3Document3 pagesSerie 3amine dhaouiNo ratings yet
- ImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1Document1,239 pagesImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1michael ourdanNo ratings yet
- 1-Introduction Regulation PDFDocument14 pages1-Introduction Regulation PDFMed Ben Ahmed100% (1)
- Ecran Star War Force Est Destinée V0.1.Document5 pagesEcran Star War Force Est Destinée V0.1.ElendrakNo ratings yet
- Projet NeuromimetiqueDocument18 pagesProjet NeuromimetiqueKhadidja KssNo ratings yet
- Gestion de Parc Auto: EnjeuxDocument8 pagesGestion de Parc Auto: EnjeuxDavid K. CophieNo ratings yet
- Technique CapitolDocument8 pagesTechnique Capitolformagnifique.franceNo ratings yet
- Devis ChateauDocument1 pageDevis ChateauAlex AdamxNo ratings yet
- Elaborer Un SdsiDocument60 pagesElaborer Un Sdsizoomtn0% (1)
- Soft ProcessorsDocument17 pagesSoft ProcessorsSmirnov ArtaéévNo ratings yet
- TecnAlarme PDFDocument44 pagesTecnAlarme PDFSemou DioufNo ratings yet
- DocimologieDocument103 pagesDocimologieHafsa Grande Corazon100% (1)
- TD S+ Rie06Document2 pagesTD S+ Rie06FiroDjinsoNanoNo ratings yet
- FI IMB-37261 C V6C4-PETU-8 Place Anatole FranceDocument17 pagesFI IMB-37261 C V6C4-PETU-8 Place Anatole FrancembaitemrarrNo ratings yet
- 981 Em15042013Document18 pages981 Em15042013elmoudjahid_dzNo ratings yet
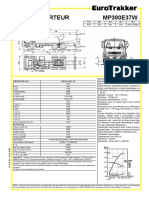
- FT Iveco Eurotrakker MP 380 e 37 W Francais PDFDocument2 pagesFT Iveco Eurotrakker MP 380 e 37 W Francais PDFSaidi JalelNo ratings yet
- Hwe 100Document79 pagesHwe 100Yavuz ErcanliNo ratings yet
- Methode - ABC (Mode de Compatibilite) - CopieDocument19 pagesMethode - ABC (Mode de Compatibilite) - CopieSaloua Fennich100% (1)
- M50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFDocument2 pagesM50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFCertyouFormationNo ratings yet
- TP PcvueDocument2 pagesTP PcvueMohamed ElbanadiNo ratings yet
- HM012F-Banc Pertes de ChargesDocument56 pagesHM012F-Banc Pertes de ChargesAmor GharsalliNo ratings yet
- Les Chaudiere A Vaporisation SimoDocument2 pagesLes Chaudiere A Vaporisation SimoCHOUKRI KamalNo ratings yet