You might also like
- Algebra Lineal U5Document27 pagesAlgebra Lineal U5Ignacio Chi ChucNo ratings yet
- Introduccion A Las Transformaciones LinealesDocument11 pagesIntroduccion A Las Transformaciones LinealesCarlos Antonio Torres BailonNo ratings yet
- Metodo de Diarion Continental, Libro Diarion, Libro Mayor y Formatos Equipo 2Document4 pagesMetodo de Diarion Continental, Libro Diarion, Libro Mayor y Formatos Equipo 2Silvestre Ramirez San JuanNo ratings yet
- Diferencia Entre Numerous Reales y NaturalesDocument1 pageDiferencia Entre Numerous Reales y NaturalesJose Angel Muñetones MadrigalNo ratings yet
- Definición y Origen de Los Números ComplejosDocument10 pagesDefinición y Origen de Los Números ComplejosAlejandro Mendoza PiñaNo ratings yet
- Pruebas de Bondad y Ajuste, Investigación - U4Document42 pagesPruebas de Bondad y Ajuste, Investigación - U4omar perez100% (1)
- Unidad 4 Probabilidad y EstadisticaDocument52 pagesUnidad 4 Probabilidad y EstadisticaCinthia MaresNo ratings yet
- Sucesiones y Series NuméricasDocument9 pagesSucesiones y Series NuméricasFabiolaNo ratings yet
- Antecedentes Historicos de La Administracion de OperacionesDocument3 pagesAntecedentes Historicos de La Administracion de Operacionesmarilu alvarezNo ratings yet
- Ejercicios de lógicaDocument13 pagesEjercicios de lógicaJOSE CARLOS PAEZ VALDEZ0% (1)
- Problemas SssssssssssDocument16 pagesProblemas SssssssssssNickolai RamosNo ratings yet
- La Inflacion en La Ingenieria EconomicaDocument7 pagesLa Inflacion en La Ingenieria EconomicaLeslyRaquel UribeMarquezNo ratings yet
- Velocidad de RXDocument8 pagesVelocidad de RXAndrea BMNo ratings yet
- 2 2 Elasticidades Precio Ingreso y CruzadaDocument6 pages2 2 Elasticidades Precio Ingreso y CruzadaFrancisco Gamboa0% (1)
- Elementos Que Integran Un Planificador de Usos Del TiempoDocument5 pagesElementos Que Integran Un Planificador de Usos Del TiempoOsvaldoNo ratings yet
- Respuestas Respondidas Al 27-01-15Document390 pagesRespuestas Respondidas Al 27-01-15Cale Poblette Macaya0% (2)
- Ejercicios de Transformaciones Lineales ResueltosDocument8 pagesEjercicios de Transformaciones Lineales ResueltosDavid Ferrusca Martinez100% (1)
- D. HipergeométricaDocument2 pagesD. HipergeométricaLuis MartinezNo ratings yet
- Composicion en InglesDocument1 pageComposicion en InglesAle VielmaNo ratings yet
- Mapa Conceptual Tema 1Document2 pagesMapa Conceptual Tema 1Jefferson Herzael Mar CastellanosNo ratings yet
- Ensayo Sobre SeriesDocument19 pagesEnsayo Sobre SeriesJESUS SEBASTIAN ANGEL VENTURANo ratings yet
- Servicios AmbientalesDocument5 pagesServicios Ambientalesgerardo solis100% (1)
- Termómetro casero con alcohol y aguaDocument2 pagesTermómetro casero con alcohol y aguaStiven SicuamiaNo ratings yet
- Ejercicios de ProgramacionDocument5 pagesEjercicios de ProgramacionCarlos MuniveNo ratings yet
- Funciones VectorialesDocument12 pagesFunciones VectorialesErik VillegasNo ratings yet
- Método de Reducción Por Suma o RestaDocument3 pagesMétodo de Reducción Por Suma o RestaEfrain Gonzalez50% (2)
- Ecuaciones PolinomicasDocument5 pagesEcuaciones PolinomicasHumnerNo ratings yet
- Esperanza MatematicaDocument7 pagesEsperanza MatematicaH LOPEZ ZAPATA MARIONo ratings yet
- Ejer Cici OsDocument32 pagesEjer Cici Osronny belNo ratings yet
- Ejercicios de TQMDocument11 pagesEjercicios de TQMKaty Melsi Cordova VelasquezNo ratings yet
- Precursores de La Ingeniería IndustrialDocument7 pagesPrecursores de La Ingeniería IndustrialPamela SantanderNo ratings yet
- Ecuaciones LinealesDocument4 pagesEcuaciones LinealesHugo MayorgaNo ratings yet
- Introducción a los números complejosDocument15 pagesIntroducción a los números complejosL Manuel CruzNo ratings yet
- Costos Directo y Mapa ConceptualDocument4 pagesCostos Directo y Mapa ConceptualRigo Cachiguango50% (2)
- Libro 2Document8 pagesLibro 2Andrea PintoNo ratings yet
- Mapa Conceptual Elementos Del CostoDocument2 pagesMapa Conceptual Elementos Del CostoKarina TuquerNo ratings yet
- Traslacion y RotacionDocument7 pagesTraslacion y RotacionING. GUSTAVO HERRERA CONTRERASNo ratings yet
- Desarrollo de ProbelmasDocument52 pagesDesarrollo de ProbelmasOrange JviceNo ratings yet
- Cartografía Conceptual Del IVADocument3 pagesCartografía Conceptual Del IVAScarlett RomeroNo ratings yet
- Mapa Conceptual Controles y TablerosDocument1 pageMapa Conceptual Controles y TablerosDaniela ReyesNo ratings yet
- Ecuaciones Con Estructura AditivaDocument1 pageEcuaciones Con Estructura AditivaLaura Del Pino Ochoa0% (1)
- Tareas Tema 2. Indicadores Del Estado Socioeconomico Nacional Regional y LocalDocument10 pagesTareas Tema 2. Indicadores Del Estado Socioeconomico Nacional Regional y LocalLuis Angel Andres CruzNo ratings yet
- Modelos Probabilisticos y Planeacion de Requerimiento de MaterialesDocument82 pagesModelos Probabilisticos y Planeacion de Requerimiento de Materialesabhironzon0% (1)
- Economia y Deseconomía de EscalaDocument4 pagesEconomia y Deseconomía de EscalaCristina Ale Asencio Bonifaz100% (1)
- Resumen Capitulo 3, 4 y 10 de Libro Primer Curso de Contabilidad Por Elias LaraDocument8 pagesResumen Capitulo 3, 4 y 10 de Libro Primer Curso de Contabilidad Por Elias LaraAlngaara100% (2)
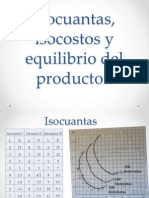
- Isocuantas, Isocostos y Equilibrio Del ProductorDocument5 pagesIsocuantas, Isocostos y Equilibrio Del ProductorMauricio Aguilera100% (1)
- Caso de estudio TelcelDocument11 pagesCaso de estudio TelcelDe la Cruz Baldit Julieta Margarita100% (1)
- Tarea Pagina 528Document5 pagesTarea Pagina 528estuardoNo ratings yet
- Armand Feigenbaum calidad totalDocument3 pagesArmand Feigenbaum calidad totalDaniel RamirezNo ratings yet
- INVENTARIOS02Document2 pagesINVENTARIOS02SantiagoApolonioOroNo ratings yet
- Anderson DarlingDocument10 pagesAnderson DarlingKathy Lopez100% (1)
- Cálculo de Volúmenes Por El Método de Los DiscosDocument2 pagesCálculo de Volúmenes Por El Método de Los DiscosSandra Milena Arango Úsuga0% (1)
- Calculo Integral C1-2 1.9 y 1.10Document14 pagesCalculo Integral C1-2 1.9 y 1.10Manolo QuezadaNo ratings yet
- Metodo de Esquina NoroesteDocument3 pagesMetodo de Esquina NoroesteNaharai Tec Garrido100% (1)
- Funciones Lineales Aplicaciones y SistemDocument15 pagesFunciones Lineales Aplicaciones y SistemMadelaine Aguilar MedinaNo ratings yet
- Suministro óptimo de vitaminas a caballosDocument11 pagesSuministro óptimo de vitaminas a caballosdiego100% (1)
- 2 RegLMulDocument21 pages2 RegLMulManuel De Jesús Salas Salas50% (2)
- Regresion Lineal 1Document9 pagesRegresion Lineal 1Maribel Martínez MárquezNo ratings yet
- Therblig'sDocument2 pagesTherblig'sEdwin OcampoNo ratings yet
- Transformaciones LinealesDocument26 pagesTransformaciones LinealesJonathan OlivasNo ratings yet
- Caso Etica MarketingDocument2 pagesCaso Etica MarketingAlma YunisNo ratings yet
- MÉTODO DEL ÁRBOL DE CAUSAS PARA INVESTIGACIÓN Y PREVENCIÓN DE ACCIDENTESDocument20 pagesMÉTODO DEL ÁRBOL DE CAUSAS PARA INVESTIGACIÓN Y PREVENCIÓN DE ACCIDENTESJuan Manuel Gonzalez GallardoNo ratings yet
- Manual operativo bombas vacío compresores anillo líquidoDocument44 pagesManual operativo bombas vacío compresores anillo líquidoGabriel Rivera Martinez100% (1)
- 1.2.3 Factores de Pago UnicoDocument11 pages1.2.3 Factores de Pago UnicoGO GA Garcia EdgarNo ratings yet
- Ciclo de Vida Del Proyeecto-IniciaciónDocument11 pagesCiclo de Vida Del Proyeecto-IniciaciónAlma YunisNo ratings yet
- PresentaciónDocument60 pagesPresentaciónAlma YunisNo ratings yet
- Unidad 1 Lista de Cotejo de PORTAFOLIO EVIDENCIASDocument1 pageUnidad 1 Lista de Cotejo de PORTAFOLIO EVIDENCIASAlma YunisNo ratings yet
- Pasta DentalDocument21 pagesPasta DentalAlma YunisNo ratings yet
- Caso Etica MarketingDocument2 pagesCaso Etica MarketingAlma YunisNo ratings yet
- ANTEPROYECTO (Maria de Los Angeles Cruz Hernandez)Document4 pagesANTEPROYECTO (Maria de Los Angeles Cruz Hernandez)Alma YunisNo ratings yet
- DocuDocument3 pagesDocuAlma YunisNo ratings yet
- GlosarioDocument40 pagesGlosarioAlma YunisNo ratings yet
- Trio Mounstros XDXDXDDocument9 pagesTrio Mounstros XDXDXDAlma YunisNo ratings yet
- Unidad 3 Inv de Op 2Document37 pagesUnidad 3 Inv de Op 2Uriel Misael Ramirez CruzNo ratings yet
- ANTEPROYECTO (Maria de Los Angeles Cruz Hernandez)Document4 pagesANTEPROYECTO (Maria de Los Angeles Cruz Hernandez)Alma YunisNo ratings yet
- Rbrica para Evaluar Un Video 1Document1 pageRbrica para Evaluar Un Video 1Daniel Alejandro AnabalonNo ratings yet
- ArtículoDocument15 pagesArtículoAlma YunisNo ratings yet
- Unidad 3 Inv de Op 2Document37 pagesUnidad 3 Inv de Op 2Uriel Misael Ramirez CruzNo ratings yet
- Reciclaje Papel-UNA TONDocument5 pagesReciclaje Papel-UNA TONpuassNo ratings yet
- ESTADISTICA - Distribicion de Frecuencias y GraficosDocument6 pagesESTADISTICA - Distribicion de Frecuencias y GraficosSandro Carax Von DanikenNo ratings yet
- Unidad 3 Inv de Op 2Document37 pagesUnidad 3 Inv de Op 2Uriel Misael Ramirez CruzNo ratings yet
- EncabezadoDocument2 pagesEncabezadoAlma YunisNo ratings yet
- InformeDocument221 pagesInformeAlma Yunis0% (1)
- MÉTODO DEL ÁRBOL DE CAUSAS PARA INVESTIGACIÓN Y PREVENCIÓN DE ACCIDENTESDocument20 pagesMÉTODO DEL ÁRBOL DE CAUSAS PARA INVESTIGACIÓN Y PREVENCIÓN DE ACCIDENTESJuan Manuel Gonzalez GallardoNo ratings yet
- FormatoDocument2 pagesFormatoAlma YunisNo ratings yet
- Madrazo Maldonado Bulmaro T3 2171 78Document16 pagesMadrazo Maldonado Bulmaro T3 2171 78Alma YunisNo ratings yet
- FormatoDocument2 pagesFormatoAlma YunisNo ratings yet
- Unidad 5Document2 pagesUnidad 5Alma YunisNo ratings yet
- Ergonomia PDFDocument72 pagesErgonomia PDFNŭƀĭsħĭro CrŭzNo ratings yet
- 19bc6d39-d2a9-4c22-a38d-37256cd45292Document106 pages19bc6d39-d2a9-4c22-a38d-37256cd45292LALESHKA TIFANI PANDIA QUISPENo ratings yet
- 1 Plan de DestrezasDocument10 pages1 Plan de DestrezasEmanuel QuilleNo ratings yet
- Ensayo 107 UNIDAD I.4 DP.Document5 pagesEnsayo 107 UNIDAD I.4 DP.Vladimir OsunaNo ratings yet
- DesarenadorDocument10 pagesDesarenadorJanira Celeste Cancio MoyaNo ratings yet
- Matematización Horizontal Mate en HolandaDocument51 pagesMatematización Horizontal Mate en Holandaabraxas540No ratings yet
- Calcular mayor, tipo triángulo, raíces ecuación cuadráticaDocument2 pagesCalcular mayor, tipo triángulo, raíces ecuación cuadráticaDaniel A. TorresNo ratings yet
- Repaso-Numeros 6Document65 pagesRepaso-Numeros 6Julio Albeiro Londoño PatiñoNo ratings yet
- Radicación en números naturalesDocument4 pagesRadicación en números naturalesAriel Reinaldo GonzalezNo ratings yet
- Links para Trabajar Habilidades en Noveno Año Matemática: Instituto Tecnológico de Costa Rica Escuela de MatemáticaDocument17 pagesLinks para Trabajar Habilidades en Noveno Año Matemática: Instituto Tecnológico de Costa Rica Escuela de Matemáticaapi-512661733No ratings yet
- El Álgebra Relacional en MysqlDocument4 pagesEl Álgebra Relacional en MysqlOmar Alejandro CBNo ratings yet
- Plan de estudios de Ingeniería de Sistemas en UMSADocument1 pagePlan de estudios de Ingeniería de Sistemas en UMSAMoisés MartínNo ratings yet
- Coordenadas PolaresDocument11 pagesCoordenadas PolaresBurgosHenryNo ratings yet
- Tipos de variables en OPLDocument1 pageTipos de variables en OPLFelipe Fernández Hernando de LarramendiNo ratings yet
- Segundo Examen Teorico Probabilidades y Estadistica-2021-2Document2 pagesSegundo Examen Teorico Probabilidades y Estadistica-2021-2GEORGE IVANOK MUNOZ CASTILLONo ratings yet
- Tarea Virtual 5 - ITB - Desarrollo de Software - EstadisticaDocument4 pagesTarea Virtual 5 - ITB - Desarrollo de Software - EstadisticaGino NoreroNo ratings yet
- Soluciones Selectividad ÁlgebraDocument109 pagesSoluciones Selectividad ÁlgebraCarlota ArroyoNo ratings yet
- Ex - Adm - Uncp 2023-I - Area IVDocument13 pagesEx - Adm - Uncp 2023-I - Area IVsalukristellNo ratings yet
- Método de Las Secciones - ESTRUCTURASDocument14 pagesMétodo de Las Secciones - ESTRUCTURASAndreaNo ratings yet
- (2003-05-26) 788 Clase Generacion de Numeros AleatoriosDocument30 pages(2003-05-26) 788 Clase Generacion de Numeros Aleatoriosjuankar20No ratings yet
- Análisis DimensionalDocument3 pagesAnálisis Dimensionalefrain chavesta estradaNo ratings yet
- Fuerza ResultanteDocument6 pagesFuerza ResultanteJhorlin David Alvear RoaNo ratings yet
- Cu AnticaDocument460 pagesCu AnticaEmilyNo ratings yet
- Curva - de Fractal PDFDocument122 pagesCurva - de Fractal PDFnestorGNo ratings yet
- Funciones elípticas introDocument7 pagesFunciones elípticas introIsaac VelasquezNo ratings yet
- GUIA No3-MATEMATICAS GRADO SEXTO-SEGUNDO PERIODODocument3 pagesGUIA No3-MATEMATICAS GRADO SEXTO-SEGUNDO PERIODOpedro luis lacera puelloNo ratings yet
- Aplicación del paradigma funcionalDocument12 pagesAplicación del paradigma funcionalMisael Angelito SalinasNo ratings yet
- Ejercicios Resueltos de Vectores en El Plano. Operaciones. MasMates. Matemáticas de Secundaria PDFDocument1 pageEjercicios Resueltos de Vectores en El Plano. Operaciones. MasMates. Matemáticas de Secundaria PDFSebastian andres Argote gonzaLezNo ratings yet
- Ejercicios de Ecuaciones de Primer grado-RESUELTOSDocument9 pagesEjercicios de Ecuaciones de Primer grado-RESUELTOSYugo sGNo ratings yet
- Anualidades Con GradientesDocument20 pagesAnualidades Con GradientesDaniela Alberca Merino100% (1)
- IVU Material S13.s13 PDFDocument25 pagesIVU Material S13.s13 PDFMarianaFlor0% (1)