You might also like
- Verilog HDL: ModuleDocument9 pagesVerilog HDL: ModuleAvinash ReddyNo ratings yet
- Digital ClockDocument11 pagesDigital ClockAmiin Gadari100% (4)
- Verilog SolnDocument15 pagesVerilog Solngannoju423100% (1)
- Assignment Week4Document3 pagesAssignment Week4saigdv1978100% (2)
- Up Down CounterDocument20 pagesUp Down Countersumi36117No ratings yet
- Verilog ProgramDocument24 pagesVerilog ProgramRahul BhatiaNo ratings yet
- (Up, Down and Modn) CountersDocument76 pages(Up, Down and Modn) CountersAashik ShaikNo ratings yet
- Verilog HDL Basics Lab Assignments: Lab Work 1. Study of Module Declaration and Module Instantiation PrinciplesDocument3 pagesVerilog HDL Basics Lab Assignments: Lab Work 1. Study of Module Declaration and Module Instantiation PrinciplesSindhu RajanNo ratings yet
- Verification Test Question Paper - MavenDocument4 pagesVerification Test Question Paper - Mavenaman nigamNo ratings yet
- Timing Design in Digital Systems: Dr. Paul D. FranzonDocument24 pagesTiming Design in Digital Systems: Dr. Paul D. FranzonMaheshNo ratings yet
- Solution of Quiz 3Document5 pagesSolution of Quiz 3Pranavkumar PatilNo ratings yet
- Path SensitizationDocument4 pagesPath SensitizationTarun SinghNo ratings yet
- Ver I Log ExamplesDocument22 pagesVer I Log ExamplesDayanand Gowda KrNo ratings yet
- DDDC87ECAA084E5DA4D2D77F7DC80391Document5 pagesDDDC87ECAA084E5DA4D2D77F7DC80391Sameer NandagaveNo ratings yet
- Digital Electronics QuestionsDocument8 pagesDigital Electronics QuestionsShivamahendar SunkaNo ratings yet
- I2c Bit Controller in VerilogDocument14 pagesI2c Bit Controller in VerilogHarish TellaNo ratings yet
- HDL Manual 2020 5th Sem E&CE 18ECL58Document74 pagesHDL Manual 2020 5th Sem E&CE 18ECL58vishvakiranaNo ratings yet
- Logic Circuits Midterm ReviewerDocument38 pagesLogic Circuits Midterm ReviewerHector Ledesma IIINo ratings yet
- Verilog Parameters and OperatorsDocument25 pagesVerilog Parameters and OperatorsR INI BHANDARINo ratings yet
- VERILOG HDL - Tutorial, PPT FormatDocument30 pagesVERILOG HDL - Tutorial, PPT FormatArslan Kiani100% (2)
- Lab 4Document25 pagesLab 4Santosh Kumar100% (1)
- Lab 4Document23 pagesLab 4Suyash MishraNo ratings yet
- Hardware Modeling Using Verilog - Unit 2 - Week 1 AssignmentDocument3 pagesHardware Modeling Using Verilog - Unit 2 - Week 1 AssignmentgudduNo ratings yet
- HDL Manual 2019 5th Sem E&CE 17ECL58Document77 pagesHDL Manual 2019 5th Sem E&CE 17ECL58vishvakirana100% (1)
- Verilog Code For Fir FilterDocument58 pagesVerilog Code For Fir FilterKishore KumarNo ratings yet
- Vlsi World - Verilog Code For RAM & ROM12456Document6 pagesVlsi World - Verilog Code For RAM & ROM12456gssharma888No ratings yet
- Lab2 VerilogDocument5 pagesLab2 VerilogHải TrầnNo ratings yet
- Department of Electronics and Communication 8051 Microcontroller and Interfacing Objective Questions and Answers Iii Year Unit - IDocument20 pagesDepartment of Electronics and Communication 8051 Microcontroller and Interfacing Objective Questions and Answers Iii Year Unit - IdeptNo ratings yet
- Brent Kung Adder 16 Bit Full CodeDocument8 pagesBrent Kung Adder 16 Bit Full CodeShavel Kumar100% (2)
- 19 MooreMealyDocument23 pages19 MooreMealynvsrox100% (1)
- BT19ECE067 Assignment 03Document11 pagesBT19ECE067 Assignment 03BT19ECE067 MiteshNo ratings yet
- Module SIPODocument4 pagesModule SIPOVenkatGollaNo ratings yet
- Chapter10 VerilogDocument62 pagesChapter10 VerilogdilipbagadiNo ratings yet
- 2 Mark Questions & AnswersDocument6 pages2 Mark Questions & AnswersMuthu KumarNo ratings yet
- DSDV MODULE 3 Implementation FabricsDocument17 pagesDSDV MODULE 3 Implementation Fabricssalman shariffNo ratings yet
- Verilog Code For The ALUDocument4 pagesVerilog Code For The ALUraja kesarwaniNo ratings yet
- Ecad Lab ManualDocument55 pagesEcad Lab Manualjeravi84100% (3)
- Lec4 VerilogDocument58 pagesLec4 VerilogRohit BhelkarNo ratings yet
- Digital Circuits For GATE ExamDocument15 pagesDigital Circuits For GATE ExamSAMIT KARMAKAR100% (1)
- Introduction To Cryptography: Homework 4: Alvin Lin January 2018 - May 2018Document6 pagesIntroduction To Cryptography: Homework 4: Alvin Lin January 2018 - May 2018Nguyễn Quang MinhNo ratings yet
- Decade CounterDocument3 pagesDecade CounterManohar thota100% (1)
- Lecture by Navakanta BhattDocument33 pagesLecture by Navakanta BhattVivek RoyNo ratings yet
- Verilog Imp...Document105 pagesVerilog Imp...Arun JyothiNo ratings yet
- Verilog Code For DemuxDocument2 pagesVerilog Code For Demuxmeaow8850% (2)
- Advanced Communication Lab Manual: Visvesvaraya Technological UniversityDocument46 pagesAdvanced Communication Lab Manual: Visvesvaraya Technological UniversityPunith Gowda M B100% (2)
- Verilog Code For Floating Point 32-Bit MultiplicationDocument5 pagesVerilog Code For Floating Point 32-Bit MultiplicationVadlamudi Sree Harsha ChowdharyNo ratings yet
- 1 Number SystemDocument14 pages1 Number SystemhemanthNo ratings yet
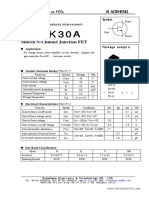
- K30a PDFDocument1 pageK30a PDFVictorManuelBernalBlancoNo ratings yet
- Final Test: Part - ADocument5 pagesFinal Test: Part - Akavya devulapalliNo ratings yet
- Vlsi Project Report Arithmetic Logical Unit Using Verilog AluDocument7 pagesVlsi Project Report Arithmetic Logical Unit Using Verilog AluAnurag KharwarNo ratings yet
- DV FinalDocument27 pagesDV FinalAnusha ChidagniNo ratings yet
- Frequency Divider D-Flip-flopsDocument12 pagesFrequency Divider D-Flip-flopsSylvester Delali Dordzi0% (1)
- PISO Verilog PDFDocument5 pagesPISO Verilog PDFSainadh YerrapragadaNo ratings yet
- 16 Bit AdderDocument4 pages16 Bit AdderNilesh Maurya100% (1)
- EE434 ASIC & Digital Systems: Partha Pande School of EECS Washington State University Pande@eecs - Wsu.eduDocument29 pagesEE434 ASIC & Digital Systems: Partha Pande School of EECS Washington State University Pande@eecs - Wsu.edumimranptclNo ratings yet
- Midterm f02 SolutionsDocument9 pagesMidterm f02 SolutionsAli NasserNo ratings yet
- Interface Verilog CodeDocument21 pagesInterface Verilog CodeVishwanath B RajashekarNo ratings yet
- Verified Interfacing ProgramDocument16 pagesVerified Interfacing ProgramVishwanath B RajashekarNo ratings yet
- Verilog Sequential ModelingDocument8 pagesVerilog Sequential ModelingR INI BHANDARINo ratings yet
- PassLeader JN0-647 Exam Dumps (1-20)Document11 pagesPassLeader JN0-647 Exam Dumps (1-20)Vlad AndreiasNo ratings yet
- 1-Foundations (EID REHMAN)Document73 pages1-Foundations (EID REHMAN)Farhana Aijaz100% (1)
- Baby Mainframe RPG AS400 ISeriesDocument4 pagesBaby Mainframe RPG AS400 ISeriesJoshElliotNo ratings yet
- Scrum PosterDocument2 pagesScrum PosterEdu Oliver100% (2)
- Charles Sr. DeveloperDocument6 pagesCharles Sr. DeveloperSatishKumarSinhaNo ratings yet
- Sky X TechnologyDocument25 pagesSky X TechnologyAshish Ben Ajay88% (8)
- A 309Document6 pagesA 309Anonymous DZZo66phNo ratings yet
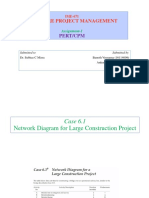
- Software Project Management: Pert/CpmDocument14 pagesSoftware Project Management: Pert/CpmHemant SinghNo ratings yet
- Safari Web ContentDocument118 pagesSafari Web ContentHemendra SabharwalNo ratings yet
- Sairam OopsDocument103 pagesSairam OopsRakshit AshNo ratings yet
- COMP3121 2 Basic Tools For Analysis of AlgorithmsDocument23 pagesCOMP3121 2 Basic Tools For Analysis of Algorithmsriders29No ratings yet
- Computer Science Past Paper Igcse CambridgeDocument11 pagesComputer Science Past Paper Igcse CambridgeAhmed0% (1)
- TMN ArchitectureDocument4 pagesTMN ArchitectureNitu Jha SaksenaNo ratings yet
- The Cisco Three Layer Hierarchical Model PDFDocument19 pagesThe Cisco Three Layer Hierarchical Model PDFSteveih100% (1)
- Successful ExecutionDocument17 pagesSuccessful ExecutionsnchaitraNo ratings yet
- JPEG Image Compression and Decompression PDFDocument7 pagesJPEG Image Compression and Decompression PDFKevin Fitzgerald SeneweNo ratings yet
- 4 DosDocument81 pages4 DosaerhaehNo ratings yet
- Navisworks File FormatsDocument4 pagesNavisworks File FormatsaswanikaNo ratings yet
- Google Code of Jam - Qualification RoundDocument10 pagesGoogle Code of Jam - Qualification RoundVivek ShahNo ratings yet
- How To Approach A CrackmeDocument4 pagesHow To Approach A CrackmeAamir ChoksiNo ratings yet
- Poradnik Mechanika - READocument215 pagesPoradnik Mechanika - REAAndrzej100% (1)
- Oracle LogminerDocument6 pagesOracle LogminerJabras GuppiesNo ratings yet
- Auto Firmware UpdateDocument4 pagesAuto Firmware UpdateJulian Arcila ValenciaNo ratings yet
- Calling IMSL C# From ExcelDocument10 pagesCalling IMSL C# From ExcelslicknslyNo ratings yet
- System Software Question Bank 2012 With Part-B AnswersDocument49 pagesSystem Software Question Bank 2012 With Part-B Answerssumathi7975% (16)
- Welcome To The Model Data Centre The 6sigmadc Software SuiteDocument18 pagesWelcome To The Model Data Centre The 6sigmadc Software SuitedexiNo ratings yet
- Linux Commands Cheat Sheet A4Document2 pagesLinux Commands Cheat Sheet A4Dharmala Chandra Sekhar100% (1)
- LabComnet1 - IT - Intro To WireSharkDocument8 pagesLabComnet1 - IT - Intro To WireSharkPhúc NguyễnNo ratings yet
- J 2 MeDocument10 pagesJ 2 MeveerufaceNo ratings yet
- Analysis Sheet of ISNP: S.No. Name Qualification Experience Conduct Performance Relation To ISNP CommentDocument6 pagesAnalysis Sheet of ISNP: S.No. Name Qualification Experience Conduct Performance Relation To ISNP CommentTarun Kumar SinghNo ratings yet