You might also like
- Cherian - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 263 - 0620Document11 pagesCherian - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 263 - 0620YOUNES KABBAJNo ratings yet
- PID Parameters Optimization Research For Hydro TurDocument17 pagesPID Parameters Optimization Research For Hydro TurLê Trung DũngNo ratings yet
- engine_controlDocument15 pagesengine_controlDhammikaNo ratings yet
- Determination of Equivalent Circuit Parameters ofDocument14 pagesDetermination of Equivalent Circuit Parameters ofFernando RubioNo ratings yet
- Islameka 2019 J. Phys. Conf. Ser. 1402 044054Document7 pagesIslameka 2019 J. Phys. Conf. Ser. 1402 044054BT20MEC120 Jyoti ThakurNo ratings yet
- PI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM DrivesDocument11 pagesPI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM Drivesrizk86No ratings yet
- Blinov_2022_IOP_Conf._Ser.__Earth_Environ._Sci._1045_012170Document8 pagesBlinov_2022_IOP_Conf._Ser.__Earth_Environ._Sci._1045_012170JeeEianYannNo ratings yet
- Development of A Specific Electronic Control System For An Engine DynamometerDocument4 pagesDevelopment of A Specific Electronic Control System For An Engine DynamometerbasrikulNo ratings yet
- Analysis of Regenerative Braking Strategy for ElecDocument8 pagesAnalysis of Regenerative Braking Strategy for ElecHakimNo ratings yet
- Vincent - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 263 - 052001Document8 pagesVincent - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 263 - 052001Dr. Ulaganathan.M, AP /EEENo ratings yet
- 90 ThreeDocument10 pages90 ThreeMekonnen ShewaregaNo ratings yet
- Drosescu 2017 IOP Conf. Ser. Mater. Sci. Eng. 252 012099Document15 pagesDrosescu 2017 IOP Conf. Ser. Mater. Sci. Eng. 252 012099GamaCraftNo ratings yet
- Explicit Nonlinear Model Predictive ControlDocument14 pagesExplicit Nonlinear Model Predictive ControlAlex ShaaaNo ratings yet
- Hiremath 2019 IOP Conf. Ser. Mater. Sci. Eng. 561 012124Document9 pagesHiremath 2019 IOP Conf. Ser. Mater. Sci. Eng. 561 012124Nguyễn Nhật QuangNo ratings yet
- Design and Analysis of Exhaust System For The Two Wheeler Using FEADocument8 pagesDesign and Analysis of Exhaust System For The Two Wheeler Using FEASourabh ApteNo ratings yet
- New SeminarDocument23 pagesNew SeminarSheron ThomasNo ratings yet
- Advances en Sotware de IngenieriaDocument11 pagesAdvances en Sotware de Ingenieriamiguel angelNo ratings yet
- Fabrication of Air Brake System Using Engine Exhaust Gas Ijariie2083Document5 pagesFabrication of Air Brake System Using Engine Exhaust Gas Ijariie2083Chetan AmrutkarNo ratings yet
- Performance Test of Motorcycle Centrifugal ClutchDocument8 pagesPerformance Test of Motorcycle Centrifugal ClutchSina ShourakiNo ratings yet
- A Theoretical and Experimental Procedure For Design Optimization of CVT BeltsDocument8 pagesA Theoretical and Experimental Procedure For Design Optimization of CVT Beltsmikael bezerra cotias dos santosNo ratings yet
- Designing of Automotive Engine Electronic Throttle Control Valve IJERTCONV4IS21044 PDFDocument4 pagesDesigning of Automotive Engine Electronic Throttle Control Valve IJERTCONV4IS21044 PDFHussnain AbbasNo ratings yet
- Design of Fuzzy Logic Tuned PID Controller For Electric Vehicle Based On IPMSM Using Ux-WeakeningDocument10 pagesDesign of Fuzzy Logic Tuned PID Controller For Electric Vehicle Based On IPMSM Using Ux-WeakeningPraful YadavNo ratings yet
- Paper para Revision 3Document12 pagesPaper para Revision 3Jhon Jiménez AcevedoNo ratings yet
- Adaptive Dual Closed Loop Speed Control WithDocument10 pagesAdaptive Dual Closed Loop Speed Control WithBattle SagaNo ratings yet
- Virtul Engine Managment SimulatorDocument15 pagesVirtul Engine Managment SimulatorTiếngHátĐêmNo ratings yet
- A Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsDocument13 pagesA Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsNouman AhmadNo ratings yet
- phd_ACODocument13 pagesphd_ACOPrasadYadavNo ratings yet
- Chatterjee 2021 IOP Conf. Ser. Mater. Sci. Eng. 1116 012103Document18 pagesChatterjee 2021 IOP Conf. Ser. Mater. Sci. Eng. 1116 012103EquipmentDesignNo ratings yet
- Thermodynamic Analysis of Two-Phase Ejector As ExpansionDocument11 pagesThermodynamic Analysis of Two-Phase Ejector As ExpansionPurwono F. SutopoNo ratings yet
- Zheng Wei 2023 Research On Active Disturbance Rejection Control Strategy of Electric Power Steering System UnderDocument11 pagesZheng Wei 2023 Research On Active Disturbance Rejection Control Strategy of Electric Power Steering System Underkhalil bouadilaNo ratings yet
- Evaluation of Artificial Neural Network Performance in Diesel EngineDocument12 pagesEvaluation of Artificial Neural Network Performance in Diesel EngineSuper ManNo ratings yet
- Spark-Advance Control Using Ion SensingDocument18 pagesSpark-Advance Control Using Ion SensingDiegoLSimaoNo ratings yet
- جدا مهمDocument8 pagesجدا مهمMustafa AlhumayreNo ratings yet
- Add Rows As Required: All India Council For Technical EducationDocument7 pagesAdd Rows As Required: All India Council For Technical EducationkpnNo ratings yet
- Control Systems in Automotive IndustryDocument23 pagesControl Systems in Automotive IndustryAbhishek BhardwajNo ratings yet
- Advanced optimization of gas turbine aero-engine transient performance using linkage-learning genetic algorithmDocument14 pagesAdvanced optimization of gas turbine aero-engine transient performance using linkage-learning genetic algorithmOliver KayNo ratings yet
- Root Locus Approach in Design of PID Controller FoDocument7 pagesRoot Locus Approach in Design of PID Controller FoSneha KumariNo ratings yet
- Carburetor and Fuel Injection SystemDocument33 pagesCarburetor and Fuel Injection SystemPrabesh PoudelNo ratings yet
- Energy Conversion and Management: Hongqing Fang, Long Chen, Zuyi ShenDocument8 pagesEnergy Conversion and Management: Hongqing Fang, Long Chen, Zuyi ShenErna UtamiNo ratings yet
- Advancement in Suspension System: - A ReviewDocument6 pagesAdvancement in Suspension System: - A ReviewdbpublicationsNo ratings yet
- CfdpipeDocument8 pagesCfdpipeTin DangNo ratings yet
- Hasananto 2021 IOP Conf. Ser. Mater. Sci. Eng. 1034 012048Document9 pagesHasananto 2021 IOP Conf. Ser. Mater. Sci. Eng. 1034 012048Ha Cao TheNo ratings yet
- Electric Power Steering - An Overview of Dynamics Equation and How It - S Developed For Large VehicleDocument8 pagesElectric Power Steering - An Overview of Dynamics Equation and How It - S Developed For Large VehiclecieloNo ratings yet
- DC Motor Modeling and Parameter Identification Using Constraint OptimizationDocument12 pagesDC Motor Modeling and Parameter Identification Using Constraint Optimizationゞ『HaiDerツ98〆No ratings yet
- Design and Validation of A Gain-Scheduled Controller For ETCDocument13 pagesDesign and Validation of A Gain-Scheduled Controller For ETCMauricio MendesNo ratings yet
- Case Studies in Thermal EngineeringDocument7 pagesCase Studies in Thermal EngineeringtöreNo ratings yet
- Journal 3Document5 pagesJournal 3mohammedsameera.me25No ratings yet
- Paper 8Document9 pagesPaper 8sainadh saiNo ratings yet
- Design and Optimise ESP for Diesel ExhaustDocument7 pagesDesign and Optimise ESP for Diesel ExhaustTushar SinghNo ratings yet
- Preliminarydesignandmulti-objectiveoptimizationofelectro-hydrostaticactuatorDocument12 pagesPreliminarydesignandmulti-objectiveoptimizationofelectro-hydrostaticactuatorYogesh RameshNo ratings yet
- Development of A Cone CVT by SDPD and Topology Optimization: April 2019Document11 pagesDevelopment of A Cone CVT by SDPD and Topology Optimization: April 2019Humayu RehmanNo ratings yet
- Performance Evaluation of Shock Absorber Acting As A Single Degree of Freedom Spring-Mass-Damper System Using MATLABDocument5 pagesPerformance Evaluation of Shock Absorber Acting As A Single Degree of Freedom Spring-Mass-Damper System Using MATLABVikranth DeepakNo ratings yet
- Full Length Article: SciencedirectDocument13 pagesFull Length Article: SciencedirectRafaZicaNo ratings yet
- Individual Cylinder Air-Fuel Ratio Control For Engines With Unevenly Spaced Firing OrderDocument11 pagesIndividual Cylinder Air-Fuel Ratio Control For Engines With Unevenly Spaced Firing OrderAndrea RidolfiNo ratings yet
- Anovelmethodfor ArduinobasedelectricvehicleemulatorDocument9 pagesAnovelmethodfor Arduinobasedelectricvehicleemulator162SHREEPARNA DHARANo ratings yet
- Polanga Oil With Diesel in CI EngineDocument37 pagesPolanga Oil With Diesel in CI Engineroshan jaiswalNo ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- Process System Value and Exergoeconomic Performance of Captive Power PlantsFrom EverandProcess System Value and Exergoeconomic Performance of Captive Power PlantsNo ratings yet
- Bosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid DriveFrom EverandBosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid DriveRobert Bosch GmbHNo ratings yet
- Development of Online Hybrid Testing: Theory and Applications to Structural EngineeringFrom EverandDevelopment of Online Hybrid Testing: Theory and Applications to Structural EngineeringRating: 5 out of 5 stars5/5 (1)
- How To Talk To Anyone - 13 Steps (With Pictures) - WikiHowDocument4 pagesHow To Talk To Anyone - 13 Steps (With Pictures) - WikiHowkrishnaNo ratings yet
- Signals and SystemsDocument2 pagesSignals and SystemskrishnaNo ratings yet
- Can 20Document72 pagesCan 20hemanthbbcNo ratings yet
- 9 Tips To Crack A Job Interview - Rediff - Com Get AheadDocument4 pages9 Tips To Crack A Job Interview - Rediff - Com Get AheadkrishnaNo ratings yet
- How to Be Knowledgeable: Gain Knowledge Through Open-Minded Learning, Practical Skills & TechnologyDocument6 pagesHow to Be Knowledgeable: Gain Knowledge Through Open-Minded Learning, Practical Skills & TechnologykrishnaNo ratings yet
- IMDb - TV Series, Rating Count at Least 100,000 (Sorted by IMDb Rating Descending) - IMDbDocument8 pagesIMDb - TV Series, Rating Count at Least 100,000 (Sorted by IMDb Rating Descending) - IMDbkrishnaNo ratings yet
- Fall Asleep Fast with Military, Breathing, and Relaxation MethodsDocument13 pagesFall Asleep Fast with Military, Breathing, and Relaxation MethodskrishnaNo ratings yet
- How To Play Chess - 14 Steps (With Pictures)Document19 pagesHow To Play Chess - 14 Steps (With Pictures)krishna100% (1)
- Parallel Lines, and Pairs of AnglesDocument4 pagesParallel Lines, and Pairs of AngleskrishnaNo ratings yet
- Fashion - WikipediaDocument19 pagesFashion - WikipediakrishnaNo ratings yet
- Ignition Timing - WikipediaDocument5 pagesIgnition Timing - WikipediakrishnaNo ratings yet
- AUTOSAR DiagnosticDocument28 pagesAUTOSAR DiagnosticSantoshNo ratings yet
- Science Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 WordsDocument4 pagesScience Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 WordskrishnaNo ratings yet
- 10 Tips To Crack A Job Interview Successfully - TJinsiteDocument10 pages10 Tips To Crack A Job Interview Successfully - TJinsitekrishnaNo ratings yet
- Science Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 WordsDocument5 pagesScience Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 WordskrishnaNo ratings yet
- Science Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 Words PDFDocument5 pagesScience Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 Words PDFkrishnaNo ratings yet
- Short Essay - "Is Science Boon or Bane"Document5 pagesShort Essay - "Is Science Boon or Bane"krishnaNo ratings yet
- Science Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 Words PDFDocument5 pagesScience Is A Boon or Bane Essay Example For Free (#2) - Sample 1317 Words PDFkrishnaNo ratings yet
- Science Is A Boon or Bane - Group DiscussionDocument17 pagesScience Is A Boon or Bane - Group Discussionkrishna0% (1)
- Device Controller - Simple English Wikipedia, The Free EncyclopediaDocument1 pageDevice Controller - Simple English Wikipedia, The Free EncyclopediakrishnaNo ratings yet
- Communication and Protocal Data - CRCDocument2 pagesCommunication and Protocal Data - CRCkrishnaNo ratings yet
- Difference between device drivers and controllersDocument3 pagesDifference between device drivers and controllerskrishnaNo ratings yet
- What Is The Advantage of Galvanic Isolation in A CAN Interface If It Can Also BreakDocument4 pagesWhat Is The Advantage of Galvanic Isolation in A CAN Interface If It Can Also Breakkrishna100% (1)
- Engineering & Design Related Questions - GrabCAD QuestionsDocument6 pagesEngineering & Design Related Questions - GrabCAD QuestionskrishnaNo ratings yet
- National Identity Elements - National Anthem - Know India - National Portal of IndiaDocument4 pagesNational Identity Elements - National Anthem - Know India - National Portal of IndiakrishnaNo ratings yet
- 10 Simple Driving Skills Everyone Should Know - Expert Safety Tips To Be A Better Driver - ThrillistDocument13 pages10 Simple Driving Skills Everyone Should Know - Expert Safety Tips To Be A Better Driver - ThrillistkrishnaNo ratings yet
- Cat - Recent Models - 3D CAD Model Collection - GrabCAD Community LibraryDocument4 pagesCat - Recent Models - 3D CAD Model Collection - GrabCAD Community LibrarykrishnaNo ratings yet
- National Identity Elements - National Anthem - Know India - National Portal of IndiaDocument4 pagesNational Identity Elements - National Anthem - Know India - National Portal of IndiakrishnaNo ratings yet
- 20 Study Hacks To Improve Your MemoryDocument9 pages20 Study Hacks To Improve Your MemorykrishnaNo ratings yet
- How To Study Maths - 7 Tips For Problem Solving - ExamTimeDocument4 pagesHow To Study Maths - 7 Tips For Problem Solving - ExamTimekrishnaNo ratings yet
- BGR PSRRDocument3 pagesBGR PSRRsachin saxenaNo ratings yet
- Linear ElectronicsDocument4 pagesLinear ElectronicsGreesh MaheshwariNo ratings yet
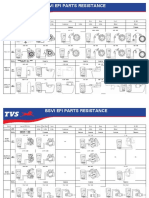
- EFI ResistanceDocument3 pagesEFI ResistanceMuni Muniyappan33% (3)
- Greenstar CDi Classic Engineer Service BookletDocument40 pagesGreenstar CDi Classic Engineer Service BookletsagmonaNo ratings yet
- Multi Channel AV Receiver: Operating InstructionsDocument155 pagesMulti Channel AV Receiver: Operating InstructionsMichael ErnstNo ratings yet
- 1280-060 DatasheetDocument43 pages1280-060 DatasheetRamesh RautNo ratings yet
- XEnergy Technical Guide en 158487Document88 pagesXEnergy Technical Guide en 158487Cris_eu09No ratings yet
- Laporan 1 Single PulseDocument17 pagesLaporan 1 Single Pulsecrisma juliantariNo ratings yet
- Bennic (Bi-Polar Radial-Axial) N10 SeriesDocument3 pagesBennic (Bi-Polar Radial-Axial) N10 Seriesester853No ratings yet
- MC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648Document12 pagesMC14528B Dual Monostable Multivibrator: PDIP-16 P Suffix CASE 648catsoithahuong84No ratings yet
- Ds SSG 8 Baur En-GbDocument2 pagesDs SSG 8 Baur En-Gbrupesh kumarNo ratings yet
- Presentation On DC MicrogridDocument9 pagesPresentation On DC MicrogridRamesh NaiduNo ratings yet
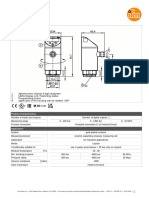
- PN7092 Pressure Sensor DisplayDocument5 pagesPN7092 Pressure Sensor DisplayEslam YehiaNo ratings yet
- M268 Guide en-USDocument6 pagesM268 Guide en-USwaynemercer000No ratings yet
- Arteche Mu HV Ug User+Manual enDocument17 pagesArteche Mu HV Ug User+Manual enPrime useNo ratings yet
- Elektricni PastirDocument5 pagesElektricni Pastirikuzma_1100% (1)
- Actuadores Electrohidraulicos PDFDocument6 pagesActuadores Electrohidraulicos PDFJorge ArimanaNo ratings yet
- Circuit BreakersDocument64 pagesCircuit BreakersPhani Kumar100% (1)
- CH 05Document14 pagesCH 05Abdul Shokor Abd TalibNo ratings yet
- AMB4520R1 (G+Usplit)Document2 pagesAMB4520R1 (G+Usplit)Thaw GyiNo ratings yet
- Tsgenco-Exam Syllabus PDFDocument9 pagesTsgenco-Exam Syllabus PDForaclerca1No ratings yet
- Fundamentals of Electrical Drives SystemsDocument14 pagesFundamentals of Electrical Drives SystemsyaredNo ratings yet
- LAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1Document25 pagesLAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1assaNo ratings yet
- Vtac Samsung Catalogue PDFDocument92 pagesVtac Samsung Catalogue PDFEduardo Mesa PérezNo ratings yet
- DS1103Document6 pagesDS1103studysmNo ratings yet
- Smart Test Series: 1-Circle The Correct One. (15x1 15)Document3 pagesSmart Test Series: 1-Circle The Correct One. (15x1 15)Zaheer AhmedNo ratings yet
- PDFDocument21 pagesPDFThuso SebinaNo ratings yet
- Fuses Del PicDocument7 pagesFuses Del PicCarlos RodríguezNo ratings yet
- PLL 2164Document24 pagesPLL 2164Benjamín Varela UmbralNo ratings yet
- Runyes Autoclave - Service ManualDocument21 pagesRunyes Autoclave - Service Manualvoica andreea67% (15)