You might also like
- Example On The Analysis of Statically Determinate FramesDocument8 pagesExample On The Analysis of Statically Determinate FramesJaaferNo ratings yet
- 1 - Matrix Method of Structural AnalysisDocument5 pages1 - Matrix Method of Structural AnalysistrixiaNo ratings yet
- Structure I Lecture18Document24 pagesStructure I Lecture18Rakesh SHNo ratings yet
- RC Design I ColumnsDocument32 pagesRC Design I Columnseph100% (1)
- Analysis of Indeterminate Structures by Force MethodDocument17 pagesAnalysis of Indeterminate Structures by Force Methodatish k100% (2)
- Wind Load Analysis by UBC For Tall Buildings - Tall BuildingsDocument3 pagesWind Load Analysis by UBC For Tall Buildings - Tall BuildingsAfzal Waseem100% (1)
- CVL312 Lecture 1Document22 pagesCVL312 Lecture 1Jay100% (1)
- Center of Gravity Vs Center of MassDocument25 pagesCenter of Gravity Vs Center of Massguptafamily1992No ratings yet
- Anna University Wind and CycloneDocument12 pagesAnna University Wind and CycloneAbinaya FoundationsNo ratings yet
- Reinforced Concrete Structures: - ProjectDocument13 pagesReinforced Concrete Structures: - ProjectAnton FilipiucNo ratings yet
- EV302 2 Flexibility MethodDocument8 pagesEV302 2 Flexibility MethodMoses HonNo ratings yet
- RCC14 Crack WidthDocument6 pagesRCC14 Crack WidthsachingadageNo ratings yet
- Structural Notes PDFDocument40 pagesStructural Notes PDFEnrico luis EscobarNo ratings yet
- Indeterminate Structure AnalysisDocument17 pagesIndeterminate Structure Analysispranjal singhNo ratings yet
- 16 - Chapter 6 PDFDocument39 pages16 - Chapter 6 PDFDipankar NathNo ratings yet
- Portal Frames DDocument48 pagesPortal Frames DMukonyora SirMartinNo ratings yet
- Flexibility Method 100Document11 pagesFlexibility Method 100Sarah SullivanNo ratings yet
- Stability and Indeterminacy100Document6 pagesStability and Indeterminacy100Sarah SullivanNo ratings yet
- Ultimate Strength Design USD of BeamDocument15 pagesUltimate Strength Design USD of BeamJohn Carl Salas100% (1)
- Design of Deep BeamsDocument81 pagesDesign of Deep BeamsMayank RajputNo ratings yet
- Structural DesignDocument25 pagesStructural DesignkozmologNo ratings yet
- Study of Seismic Behavior On RC Buildings by Non-Linear Pushover AnalysisDocument52 pagesStudy of Seismic Behavior On RC Buildings by Non-Linear Pushover AnalysisRakesh YadavNo ratings yet
- Study of Substitute Frame Method of Analysis For Lateral Loading ConditionsDocument39 pagesStudy of Substitute Frame Method of Analysis For Lateral Loading ConditionschauhannishargNo ratings yet
- Shear WallsDocument5 pagesShear WallsersinNo ratings yet
- Structural Analysis and Design of Multi-Storeyed Building: Project MembersDocument29 pagesStructural Analysis and Design of Multi-Storeyed Building: Project MembersKem Rai100% (1)
- Minor Project 1Document105 pagesMinor Project 1Harsh Verma100% (2)
- Initial Width and Depth of BeamDocument3 pagesInitial Width and Depth of BeamsssdadaNo ratings yet
- Influence Lines For Beams and FramesDocument7 pagesInfluence Lines For Beams and FramesAfia S HameedNo ratings yet
- Vertical Loads On Building Frames: Assumptions For The Analysis of Girders Using Approximate AnalysisDocument10 pagesVertical Loads On Building Frames: Assumptions For The Analysis of Girders Using Approximate AnalysisNeven Ahmed HassanNo ratings yet
- Lecture 1 Overview of The FEMDocument60 pagesLecture 1 Overview of The FEMMarcoFranchinottiNo ratings yet
- Short Columns by CharifDocument21 pagesShort Columns by CharifMiski45No ratings yet
- Etabs Column DesignDocument15 pagesEtabs Column Designmagdyamdb100% (1)
- Two Dimensional Analysis of Frame StructuresDocument54 pagesTwo Dimensional Analysis of Frame StructuresFrank PuchiNo ratings yet
- Push Over Analysis ExampleDocument6 pagesPush Over Analysis ExampleIlia Joresov IlievNo ratings yet
- 550x550 Column Design (Page 96-101)Document6 pages550x550 Column Design (Page 96-101)Aashu chaudharyNo ratings yet
- Torsion Tension and Column (11-16)Document33 pagesTorsion Tension and Column (11-16)Raphael OkudetumNo ratings yet
- Steel Project 2010-2011 1st Term LECTURE01Document77 pagesSteel Project 2010-2011 1st Term LECTURE01Noaman RehanNo ratings yet
- Lecture Note On Mechanics and Design of Reinforced Concrete - Victor E.saouma - (2002)Document185 pagesLecture Note On Mechanics and Design of Reinforced Concrete - Victor E.saouma - (2002)Yudhi Pranata100% (1)
- Direct Stiffness MethodDocument18 pagesDirect Stiffness MethodJayChristian Quimson100% (1)
- Design - Calcs - Coupling Beams 4-7Document4 pagesDesign - Calcs - Coupling Beams 4-7Krishna AnishNo ratings yet
- Multistoreyed Building 5Document11 pagesMultistoreyed Building 5V.m. RajanNo ratings yet
- Design - Calcs - Core Wall 1-7Document8 pagesDesign - Calcs - Core Wall 1-7Krishna AnishNo ratings yet
- Mechap 06Document82 pagesMechap 06Zain AmirNo ratings yet
- RCC Design TipsDocument9 pagesRCC Design Tipssatoni12No ratings yet
- Advanced Structural Analysis IntroductionDocument20 pagesAdvanced Structural Analysis IntroductionJasmine PagligaranNo ratings yet
- Structural Analysis 7 Edition in SI UnitsDocument47 pagesStructural Analysis 7 Edition in SI UnitsChime MornNo ratings yet
- Chapter6 StiffnessMethodDocument11 pagesChapter6 StiffnessMethodkaranfilhasanNo ratings yet
- 3 Pinned Portal FramesDocument11 pages3 Pinned Portal FramesTamunosaki AwolayeoforiNo ratings yet
- Earthquake CodesDocument2 pagesEarthquake Codesshaik mohammed ArshadNo ratings yet
- Computer Aided Analysis and Design of Building StructuresDocument147 pagesComputer Aided Analysis and Design of Building StructuresMARUTHISH KUNCHAMNo ratings yet
- RC-I Chapter 2 PDFDocument36 pagesRC-I Chapter 2 PDFWendimu TolessaNo ratings yet
- Stair Case Design: Say, 180 MM 164 MMDocument3 pagesStair Case Design: Say, 180 MM 164 MMShashankSinghNo ratings yet
- Introduction of Determinate and Indeterminate StructuresDocument13 pagesIntroduction of Determinate and Indeterminate Structuresazerai2000No ratings yet
- Week 1 - Structural SystemDocument36 pagesWeek 1 - Structural Systemdanis nyaNo ratings yet
- Lecture 11 - Approximate MethodDocument29 pagesLecture 11 - Approximate MethodKhaled AlregebNo ratings yet
- Notes 08aDocument5 pagesNotes 08aopulitheNo ratings yet
- Slope Deflection and Moment Distribution MethodDocument33 pagesSlope Deflection and Moment Distribution MethodBari FayzulNo ratings yet
- Linear-VS-Nonlinear-Buckling - Open AreaDocument22 pagesLinear-VS-Nonlinear-Buckling - Open AreaishitaNo ratings yet
- CivE 372 - 35 - Final Exam ReviewDocument35 pagesCivE 372 - 35 - Final Exam ReviewAlfred TongNo ratings yet
- Co-4 Outcome: Analyze The Rigid Bodies Under Translation and Rotation With and Without Considering ForcesDocument23 pagesCo-4 Outcome: Analyze The Rigid Bodies Under Translation and Rotation With and Without Considering ForcesrajeswariNo ratings yet
- In The: CavityDocument9 pagesIn The: Cavitybrowar444No ratings yet
- RFID Adoption by Supply Chain Organizations in MalaysiaDocument5 pagesRFID Adoption by Supply Chain Organizations in MalaysiaWalid GradaNo ratings yet
- Defects in Fusion WeldingDocument83 pagesDefects in Fusion WeldingBalakumar100% (1)
- Numerical Analisis 2015Document357 pagesNumerical Analisis 2015mariaNo ratings yet
- Understanding & Programming The PIC16C84: A Beginners' Tutorial Jim BrownDocument35 pagesUnderstanding & Programming The PIC16C84: A Beginners' Tutorial Jim BrownCornelius CampbellNo ratings yet
- 3 Types of Emergency Shutdown and Emergency Isolation ValvesDocument4 pages3 Types of Emergency Shutdown and Emergency Isolation ValvesMateusz KonopnickiNo ratings yet
- Che 243 Fluid Dynamics: Problem Set #4 Solutions: SolutionDocument9 pagesChe 243 Fluid Dynamics: Problem Set #4 Solutions: SolutionKyungtae Park100% (2)
- Design Calculation of PavementDocument4 pagesDesign Calculation of Pavementorode franklyn100% (1)
- Dot 57406 DS1Document172 pagesDot 57406 DS1Carlos FernandezNo ratings yet
- Solar Radiation, Heat Balance and Temperature Chapter 8 - Class 11 Geography NCERT - Class Notes - Samagra Book Series Batch (Hinglish)Document30 pagesSolar Radiation, Heat Balance and Temperature Chapter 8 - Class 11 Geography NCERT - Class Notes - Samagra Book Series Batch (Hinglish)avnish.k.verma.2014No ratings yet
- 1 SMDocument6 pages1 SMDejan DoslicNo ratings yet
- PartIII Semiconductor at Equilibrium PrintDocument22 pagesPartIII Semiconductor at Equilibrium PrintK.bhogendranathareddy KuppireddyNo ratings yet
- RC OscillatorDocument8 pagesRC OscillatorRavi TejaNo ratings yet
- Emulsions: - Part 1 Preparation Methods (Some) PropertiesDocument52 pagesEmulsions: - Part 1 Preparation Methods (Some) PropertieschandramohanNo ratings yet
- Chapter3 Torsion FinalDocument78 pagesChapter3 Torsion FinalNaveen KumarNo ratings yet
- Chemistry Pupil Book 10 - 12Document260 pagesChemistry Pupil Book 10 - 12Mawolo WuolewuNo ratings yet
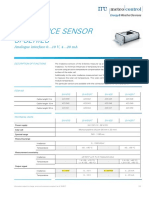
- DB Irradiance Sensor Si-Series en 20171016Document3 pagesDB Irradiance Sensor Si-Series en 20171016Solar ProjectsNo ratings yet
- First EncounterDocument14 pagesFirst EncounterMuraliNo ratings yet
- Recent Advances in Biophoton Research and Its Applications - Quantum Theory of Biophoton EmissionDocument54 pagesRecent Advances in Biophoton Research and Its Applications - Quantum Theory of Biophoton Emissionfrederic dugenouxNo ratings yet
- Cisco HyperFlex Systems Technical DeckDocument81 pagesCisco HyperFlex Systems Technical Deckkinan_kazuki104No ratings yet
- Canal RegulatorDocument13 pagesCanal RegulatorBibhuti Bhusan Sahoo100% (1)
- Appendix15B - RE Wall Design ChecklistDocument6 pagesAppendix15B - RE Wall Design ChecklistRavi Chandra IvpNo ratings yet
- CCNA 4 - Chapter 2 QuzDocument1 pageCCNA 4 - Chapter 2 Quzchobiipiggy26No ratings yet
- Coex: Architecture Comprehensive Course: ORQUESTA, RONALD P. - 201610154 Bsarch 5-1Document9 pagesCoex: Architecture Comprehensive Course: ORQUESTA, RONALD P. - 201610154 Bsarch 5-1RONALD ORQUESTANo ratings yet
- 04d Process Map Templates-V2.0 (PowerPiont)Document17 pages04d Process Map Templates-V2.0 (PowerPiont)Alfredo FloresNo ratings yet
- Elysium TranslatorDocument24 pagesElysium Translatorfilip_bonacic3908No ratings yet
- ECE7360 Project3Document58 pagesECE7360 Project3Icaro.RedwarriorNo ratings yet
- New Microsoft Office Word DocumentDocument20 pagesNew Microsoft Office Word DocumentVinay KumarNo ratings yet
- Holiday Homework Class 12 MathematicsDocument2 pagesHoliday Homework Class 12 MathematicsKartik SharmaNo ratings yet
- BS en 10028-1Document24 pagesBS en 10028-1Andrei Balázs100% (1)