You might also like
- Mastercam Training Guide: Mill-Lesson-4-49Document1 pageMastercam Training Guide: Mill-Lesson-4-49Deepak DeepuNo ratings yet
- Aluminum Die Tool Design For T-BranchDocument19 pagesAluminum Die Tool Design For T-BranchDeepak DeepuNo ratings yet
- Principles of Machining - Certificate of CompletionDocument1 pagePrinciples of Machining - Certificate of CompletionDeepak DeepuNo ratings yet
- Us5753799 PDFDocument17 pagesUs5753799 PDFDeepak DeepuNo ratings yet
- Swivels (Standard & H S Service) : Operation Instruction and Service ManualDocument44 pagesSwivels (Standard & H S Service) : Operation Instruction and Service ManualDeepak Deepu100% (1)
- Pu-Dhda33-4 Rev1Document3 pagesPu-Dhda33-4 Rev1Deepak DeepuNo ratings yet
- Valve Test Benches: Safe, Proven, and Reliable Valve Testing SolutionsDocument1 pageValve Test Benches: Safe, Proven, and Reliable Valve Testing SolutionsDeepak DeepuNo ratings yet
- Air Refriegeration SystemDocument23 pagesAir Refriegeration SystemDeepak DeepuNo ratings yet
- Me 2013 PDFDocument34 pagesMe 2013 PDFDeepak DeepuNo ratings yet
- Data Sheet - DHDA Test PumpDocument2 pagesData Sheet - DHDA Test PumpDeepak DeepuNo ratings yet
- ANSYS Platform Support Stategy and Plans July 2015Document4 pagesANSYS Platform Support Stategy and Plans July 2015Deepak DeepuNo ratings yet
- B.tech Mech SyllabusDocument21 pagesB.tech Mech SyllabusDeepak DeepuNo ratings yet
- B.Tech Mech Syllabus PDFDocument226 pagesB.Tech Mech Syllabus PDFDeepak DeepuNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Types of Electrical Splices & JointsDocument24 pagesTypes of Electrical Splices & JointsVic Aziz Gonowon BadiolaNo ratings yet
- Explorer 7000 (En) User Manual - 150722Document31 pagesExplorer 7000 (En) User Manual - 150722AlexNo ratings yet
- EN25F80Document35 pagesEN25F80Juan GutierrezNo ratings yet
- Detachable Shuddering Device For Visually Impaired PeopleDocument10 pagesDetachable Shuddering Device For Visually Impaired PeopleIJRASETPublicationsNo ratings yet
- Characteristics of Zener DiodeDocument3 pagesCharacteristics of Zener DiodeMathi PriyaNo ratings yet
- Block Diagram of 8051 MicrocontrollerDocument18 pagesBlock Diagram of 8051 Microcontrollermd Sadikul IslamNo ratings yet
- Migration Kit MKVI To VIe - PresentationDocument5 pagesMigration Kit MKVI To VIe - Presentationzizu1234100% (1)
- Actuating DXR2Document7 pagesActuating DXR2Mark Izsm AmersonNo ratings yet
- Arduino Bootloader: The HardwareDocument5 pagesArduino Bootloader: The HardwareMilan MilenkovićNo ratings yet
- Analog To Digital & Digital To Analog Conversion: Nasif MDocument39 pagesAnalog To Digital & Digital To Analog Conversion: Nasif MnobodyNo ratings yet
- ICU4Me+Instrument+ ClusterDocument32 pagesICU4Me+Instrument+ ClusterJuan Mendoza100% (4)
- Grade 7ste IctDocument60 pagesGrade 7ste IctcarlroyeriksontagasaNo ratings yet
- 02 Pricing Wattmon, Modules & Sensors (INR) - July 2020Document9 pages02 Pricing Wattmon, Modules & Sensors (INR) - July 2020Geevarghese S IsaacNo ratings yet
- CMOS Interview QuestionsDocument9 pagesCMOS Interview QuestionsarunNo ratings yet
- Specifications: - : User'S Operating Manual For Pid Digital Temperature ControllerDocument9 pagesSpecifications: - : User'S Operating Manual For Pid Digital Temperature ControllerAnjum ParkarNo ratings yet
- 09-Humble Homemade Hifi - PhleaDocument4 pages09-Humble Homemade Hifi - Phleajns0110No ratings yet
- HRTR 3B "XL" Diffuse Reflection Light Scanner With Background SuppressionDocument4 pagesHRTR 3B "XL" Diffuse Reflection Light Scanner With Background SuppressionMinn HtutNo ratings yet
- Diagrama Electrico 777GDocument27 pagesDiagrama Electrico 777GSamuel Tirado Canihuante100% (1)
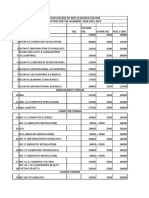
- Hindusthan College of Arts & Science College Fees Structure For The Academic Year 2021-2022Document7 pagesHindusthan College of Arts & Science College Fees Structure For The Academic Year 2021-2022Libin JoNo ratings yet
- Whirlpool Awo D 53105 Service PDFDocument29 pagesWhirlpool Awo D 53105 Service PDFbogdan80No ratings yet
- G120 CU250S2 Op Instr 0917 en-USDocument538 pagesG120 CU250S2 Op Instr 0917 en-USJovica ČukuranovićNo ratings yet
- Mmse ProofDocument2 pagesMmse ProofQaddafi KhanNo ratings yet
- Lab ManualDocument87 pagesLab ManualSrividya KondaguntaNo ratings yet
- Physics O Level Definition and Law and Principles ListDocument9 pagesPhysics O Level Definition and Law and Principles ListTien Wai NgNo ratings yet
- Transmission D6RDocument14 pagesTransmission D6RRajan Mullappilly100% (2)
- Chap - 2 SLC & Micro Logic PLC FamilyDocument8 pagesChap - 2 SLC & Micro Logic PLC FamilyMandarinuiNo ratings yet
- Global Fire: Addressable Zone Monitoring UnitDocument1 pageGlobal Fire: Addressable Zone Monitoring UnitGabrielNo ratings yet
- MillerDocument3 pagesMillerChiara Celine T. HernandezNo ratings yet
- HJS-480-0-220 480W Switching Power Supply InstructionsDocument11 pagesHJS-480-0-220 480W Switching Power Supply Instructionsdonsterthemonster0% (2)
- Electrical Safety Single Phase Equipment A3 PosterDocument1 pageElectrical Safety Single Phase Equipment A3 PosterDavid GoNo ratings yet