You might also like
- Interior Gradient and Proximal Methods For Convex and Conic OptimizationDocument29 pagesInterior Gradient and Proximal Methods For Convex and Conic Optimizationhitzero20032131No ratings yet
- Multigrid methods for isogeometric discretizationDocument13 pagesMultigrid methods for isogeometric discretizationtomar_skNo ratings yet
- Finite Element MethodDocument37 pagesFinite Element Methodaditya2053No ratings yet
- Extensions of Compressed Sensing: Yaakov Tsaig David L. Donoho October 22, 2004Document20 pagesExtensions of Compressed Sensing: Yaakov Tsaig David L. Donoho October 22, 2004vliviuNo ratings yet
- A Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionDocument22 pagesA Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionbradjenoNo ratings yet
- Efficient and Accurate Numerical Simulation of Acoustic Wave Propagation in A 2D Heterogeneous MediaDocument17 pagesEfficient and Accurate Numerical Simulation of Acoustic Wave Propagation in A 2D Heterogeneous MediaJese MadridNo ratings yet
- Journal of Computational Physics: K. Lipnikov, G. ManziniDocument26 pagesJournal of Computational Physics: K. Lipnikov, G. ManzinidwstephensNo ratings yet
- Mesh Grading in Isogeometric Analysis: Ulrich Langer, Angelos Mantzaflaris, Stephen Moore, Ioannis ToulopoulosDocument26 pagesMesh Grading in Isogeometric Analysis: Ulrich Langer, Angelos Mantzaflaris, Stephen Moore, Ioannis ToulopoulosJorge Luis Garcia ZuñigaNo ratings yet
- Local Discontinuous Galerkin Methods For High-Order Time-Dependent Partial Differential EquationsDocument57 pagesLocal Discontinuous Galerkin Methods For High-Order Time-Dependent Partial Differential EquationsAman JalanNo ratings yet
- Through-the-Wall Microwave Imaging: Forward and Inverse Scattering ModelingDocument12 pagesThrough-the-Wall Microwave Imaging: Forward and Inverse Scattering ModelingSamparka SanyalNo ratings yet
- Finite Element Method: From Wikipedia, The Free EncyclopediaDocument13 pagesFinite Element Method: From Wikipedia, The Free EncyclopediaMuhammad SafdarNo ratings yet
- Discontinuous collocation methods restore accuracy for gravitational self-force PDEsDocument29 pagesDiscontinuous collocation methods restore accuracy for gravitational self-force PDEsbabistokasNo ratings yet
- An Efficient High-Order Algorithm For Scattering by Inhomogeneous Penetrable MediaDocument206 pagesAn Efficient High-Order Algorithm For Scattering by Inhomogeneous Penetrable MediaHari Madhavan Krishna KumarNo ratings yet
- Meshless - Science DirectDocument13 pagesMeshless - Science Directenatt2012No ratings yet
- Markov Chain Monte Carlo Combined With Deterministic Methods For Markov Random Field OptimizationDocument8 pagesMarkov Chain Monte Carlo Combined With Deterministic Methods For Markov Random Field OptimizationLovely BabuNo ratings yet
- Reserach Proposal MTP114 Hazrat AliDocument11 pagesReserach Proposal MTP114 Hazrat AliDr-Hazrat AliNo ratings yet
- Icfd10 Eg 30i1Document8 pagesIcfd10 Eg 30i1NextScribeNo ratings yet
- Eabe D 22 00246R - 2Document23 pagesEabe D 22 00246R - 2Lek ChaNo ratings yet
- Method of Moments for 2D Scattering Problems: Basic Concepts and ApplicationsFrom EverandMethod of Moments for 2D Scattering Problems: Basic Concepts and ApplicationsNo ratings yet
- Taylor-SPH: A Two-Steps Time Discretization Scheme Using The SPH Method For Shock Wave PropagationDocument13 pagesTaylor-SPH: A Two-Steps Time Discretization Scheme Using The SPH Method For Shock Wave PropagationIsabel H. CidNo ratings yet
- Computational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)From EverandComputational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)No ratings yet
- Exact Integration of Polynomial-Exponential Products With Application To Wave-Based Numerical MethodsDocument10 pagesExact Integration of Polynomial-Exponential Products With Application To Wave-Based Numerical MethodsAishwaryaNo ratings yet
- Sampling and Interpolation in Bargmann-Fock Spaces of PolyanalyticDocument16 pagesSampling and Interpolation in Bargmann-Fock Spaces of PolyanalyticpvhaoNo ratings yet
- Psmir 1977 S4 A14 0Document14 pagesPsmir 1977 S4 A14 0FlorinNo ratings yet
- Incompressible Flow Simulations of Composite Objects Using Meshfree and FPM ApproachesDocument4 pagesIncompressible Flow Simulations of Composite Objects Using Meshfree and FPM ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Higher-order spectral/hp FEM for shells and fluid flowsDocument24 pagesHigher-order spectral/hp FEM for shells and fluid flowsjoojoo987654321No ratings yet
- Chan Wan2000Document30 pagesChan Wan2000asdfghjklNo ratings yet
- A posteriori error estimation of Kirchhoff plates and shellsDocument20 pagesA posteriori error estimation of Kirchhoff plates and shellsJorge Luis Garcia ZuñigaNo ratings yet
- A Fully Locking Free Isogeometric Approach For Plane Linear Elasticity Problems A Stream Function FormulationDocument13 pagesA Fully Locking Free Isogeometric Approach For Plane Linear Elasticity Problems A Stream Function FormulationMojtaba MohebiniaNo ratings yet
- Ruiz - 2019 - Optimization of The Electromagnetic Scattering Problem Based On The TopologicalDocument20 pagesRuiz - 2019 - Optimization of The Electromagnetic Scattering Problem Based On The TopologicalDenis CarlosNo ratings yet
- Yang 2012Document21 pagesYang 2012prabowoNo ratings yet
- Journal of Computational Physics: Armando Coco, Giovanni RussoDocument38 pagesJournal of Computational Physics: Armando Coco, Giovanni RussoAnonymous tIwg2AyNo ratings yet
- Adaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDocument13 pagesAdaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDesmondd MondNo ratings yet
- Studio Express A1 - DeutschDocument22 pagesStudio Express A1 - DeutschMr. K0% (1)
- 059 Article EquationsDocument17 pages059 Article EquationselectrotehnicaNo ratings yet
- Use COMSOL for efficient inverse modeling of aquifersDocument8 pagesUse COMSOL for efficient inverse modeling of aquifersLexin LiNo ratings yet
- Designing Broad-Band Patch Antennas Using The Sequential Quadratic Programming MethodDocument4 pagesDesigning Broad-Band Patch Antennas Using The Sequential Quadratic Programming MethodNageswara Rao ChallaNo ratings yet
- Further Developments On GMLS: Plates On Elastic FoundationDocument6 pagesFurther Developments On GMLS: Plates On Elastic FoundationChristian ZoundjiNo ratings yet
- Comparison of Six Different Methods For Calculating TraveltimesDocument29 pagesComparison of Six Different Methods For Calculating TraveltimesNAGENDR_006No ratings yet
- Constrained Fitting of B-Spline Curves Based Onthe Force Density MethodDocument7 pagesConstrained Fitting of B-Spline Curves Based Onthe Force Density MethodBobNo ratings yet
- Long-Term Prediction of Time Series Using State-Space ModelsDocument11 pagesLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosNo ratings yet
- ADMOS 2013 conference paper on fully coupled finite volume solverDocument12 pagesADMOS 2013 conference paper on fully coupled finite volume solverErnesto Delfino AguirreNo ratings yet
- Finding The K Shortest Paths: David Eppstein March 31, 1997Document26 pagesFinding The K Shortest Paths: David Eppstein March 31, 1997Phạm Đức MinhNo ratings yet
- Curved Beams With Elastic Supports. Transfer and Stiffness MatricesDocument6 pagesCurved Beams With Elastic Supports. Transfer and Stiffness MatricesZainab SattarNo ratings yet
- Summation-By-Parts in Time: Journal of Computational Physics June 2013Document26 pagesSummation-By-Parts in Time: Journal of Computational Physics June 2013bakhadirNo ratings yet
- As Conformal As Possible Discrete Volumetric MappingDocument7 pagesAs Conformal As Possible Discrete Volumetric MappingUno De MadridNo ratings yet
- A Comparative Study of Energy Minimization Methods For Markov Random FieldsDocument14 pagesA Comparative Study of Energy Minimization Methods For Markov Random Fieldsmeomuop2508No ratings yet
- Exploring Phononic Properties of Two-Dimensional Materials Using Machine Learning Interatomic PotentialsDocument16 pagesExploring Phononic Properties of Two-Dimensional Materials Using Machine Learning Interatomic PotentialsSoumya MondalNo ratings yet
- An Introduction To Standard and EnrichedDocument92 pagesAn Introduction To Standard and EnrichedJorge Luis Garcia ZuñigaNo ratings yet
- The Geometry of Graphs and Some of Its Algorithmic ApplicationsDocument31 pagesThe Geometry of Graphs and Some of Its Algorithmic ApplicationsSergio Andrés UrreaNo ratings yet
- DFT Study of the Electronic Structure of EuHfO3Document6 pagesDFT Study of the Electronic Structure of EuHfO3Maycol AvalosNo ratings yet
- Bordas PhuDocument42 pagesBordas PhuTg DgNo ratings yet
- Modeling Elastic Wave Propagation in Waveguides With The Finite ElementDocument10 pagesModeling Elastic Wave Propagation in Waveguides With The Finite ElementAshwini PavankumarNo ratings yet
- An Overview of Smoothed Particle Hydrodynamics For Simulating Multiphase FlowDocument31 pagesAn Overview of Smoothed Particle Hydrodynamics For Simulating Multiphase Flow박송환No ratings yet
- Studies of An Infinite Element Method For Acoustical RadiationDocument15 pagesStudies of An Infinite Element Method For Acoustical RadiationDr. Sushant ShekharNo ratings yet
- Applied Mathematical Modelling: Masoud Ahookhosh, Keyvan Amini, Mohammad Reza PeyghamiDocument10 pagesApplied Mathematical Modelling: Masoud Ahookhosh, Keyvan Amini, Mohammad Reza PeyghamiSebastian David Ariza CollNo ratings yet
- Local Adaptive Mesh Refinement For Shock Hydrodynamics: BergerDocument21 pagesLocal Adaptive Mesh Refinement For Shock Hydrodynamics: BergeryeibiNo ratings yet
- Geometrically guided exemplar-based inpainting reconstructs missing image partsDocument37 pagesGeometrically guided exemplar-based inpainting reconstructs missing image partsBilius LauraNo ratings yet
- Thong Ke Bve FULL OFFDocument2 pagesThong Ke Bve FULL OFFPhay gaen CH - K24No ratings yet
- Thong Ke Bve FULL OFFDocument2 pagesThong Ke Bve FULL OFFPhay gaen CH - K24No ratings yet
- Principles of Reinforced Concrete Design: July 2014Document8 pagesPrinciples of Reinforced Concrete Design: July 2014Phay gaen CH - K24No ratings yet
- Chuong 2 p6 Forced Vib Tai Tong QuatDocument24 pagesChuong 2 p6 Forced Vib Tai Tong QuatPhay gaen CH - K24No ratings yet
- F1 - CanteenDocument14 pagesF1 - CanteenPhay gaen CH - K24No ratings yet
- The Force Method For Analysis of Staticaly Indeterminate StructuresDocument44 pagesThe Force Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24No ratings yet
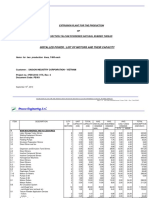
- Installed Power: List of Motors and Their Capacity: Extrusion Plant For The ProductionDocument6 pagesInstalled Power: List of Motors and Their Capacity: Extrusion Plant For The ProductionPhay gaen CH - K24No ratings yet
- Thong Ke Bve FULL OFFDocument2 pagesThong Ke Bve FULL OFFPhay gaen CH - K24No ratings yet
- F1 - OfficeDocument19 pagesF1 - OfficePhay gaen CH - K24No ratings yet
- Principles of Reinforced Concrete Design: July 2014Document8 pagesPrinciples of Reinforced Concrete Design: July 2014Phay gaen CH - K24No ratings yet
- 3D Analysis of RC Frames Using Effective-Stiffness ModelsDocument8 pages3D Analysis of RC Frames Using Effective-Stiffness ModelsPhay gaen CH - K24No ratings yet
- A Comparative Study On Effectiveness of Using Horasan Mortar As A Pure Friction Sliding Interface MaterialDocument6 pagesA Comparative Study On Effectiveness of Using Horasan Mortar As A Pure Friction Sliding Interface MaterialPhay gaen CH - K24No ratings yet
- Structural Mechanics Lectures OverviewDocument40 pagesStructural Mechanics Lectures OverviewPhay gaen CH - K24No ratings yet
- C6Document15 pagesC6Phay gaen CH - K24No ratings yet
- The Combined Method For Analysis of Staticaly Indeterminate StructuresDocument6 pagesThe Combined Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24No ratings yet
- Chapter 7Document1 pageChapter 7Phay gaen CH - K24No ratings yet
- The Force Method For Analysis of Staticaly Indeterminate StructuresDocument12 pagesThe Force Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24No ratings yet
- The Force Method For Analysis of Staticaly Indeterminate StructuresDocument44 pagesThe Force Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24No ratings yet
- Displacement of Structures: PurposesDocument13 pagesDisplacement of Structures: PurposesPhay gaen CH - K24No ratings yet
- Analysis of Internal Forces in Statically Determinate Structures Due To Moving LoadsDocument12 pagesAnalysis of Internal Forces in Statically Determinate Structures Due To Moving LoadsPhay gaen CH - K24No ratings yet
- Multi tuned liquid dampers reduce structure vibrationDocument16 pagesMulti tuned liquid dampers reduce structure vibrationanon_427517856No ratings yet
- Analysis of internal forces in statically determinate structuresDocument9 pagesAnalysis of internal forces in statically determinate structuresPhay gaen CH - K24No ratings yet
- Bai Bao Phuoc Thi PDFDocument9 pagesBai Bao Phuoc Thi PDFPhay gaen CH - K24No ratings yet
- The Force Method For Analysis of Staticaly Indeterminate StructuresDocument12 pagesThe Force Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24No ratings yet
- Homework 2Document2 pagesHomework 2Brian SmithNo ratings yet
- Structural Mechanics Lectures OverviewDocument40 pagesStructural Mechanics Lectures OverviewPhay gaen CH - K24No ratings yet
- Multi tuned liquid dampers reduce structure vibrationDocument16 pagesMulti tuned liquid dampers reduce structure vibrationanon_427517856No ratings yet
- Homework 10Document11 pagesHomework 10Phay gaen CH - K24No ratings yet
- Numerical Dynamic Analysis of Stiffened Plates Under Blast Loading PDFDocument15 pagesNumerical Dynamic Analysis of Stiffened Plates Under Blast Loading PDFPhay gaen CH - K24No ratings yet
- Canon MF8580Cdw-MF8570Cdw-MF8550Cd-MF8540Cdn-MF8530Cdn PC PDFDocument68 pagesCanon MF8580Cdw-MF8570Cdw-MF8550Cd-MF8540Cdn-MF8530Cdn PC PDFEduard PopescuNo ratings yet
- Pokayoke WarehouseDocument11 pagesPokayoke WarehousehgiNo ratings yet
- Videojet 7220 Fiber Laser Marking MachineDocument2 pagesVideojet 7220 Fiber Laser Marking MachineKoda AlukardNo ratings yet
- SAP Training BrochureDocument8 pagesSAP Training BrochureParagKosurkarNo ratings yet
- Review of Ecodesign Methods and Tools - Barriers and StrategiesDocument13 pagesReview of Ecodesign Methods and Tools - Barriers and Strategiesmatic91No ratings yet
- List of Operator - AfricaDocument114 pagesList of Operator - AfricaRafi AnsariNo ratings yet
- Automata & Complexity Theory Cosc3025: Chapter OneDocument27 pagesAutomata & Complexity Theory Cosc3025: Chapter Oneabebaw ataleleNo ratings yet
- Logical Propositions ExplainedDocument38 pagesLogical Propositions ExplainedПарасат КуандыкNo ratings yet
- Manual de Agisoft APIDocument147 pagesManual de Agisoft APIMario Gallardo CaballeroNo ratings yet
- Project 3 Final DraftDocument5 pagesProject 3 Final Draftapi-573370631No ratings yet
- 8 Ways Digital Teachers Prepare Students for Global EconomyDocument11 pages8 Ways Digital Teachers Prepare Students for Global EconomyAna Marie TagayunNo ratings yet
- kpr_ist_eng_22a_ii_stDocument172 pageskpr_ist_eng_22a_ii_stnotmcantekNo ratings yet
- Book IELTS Test Online Payment WizardDocument2 pagesBook IELTS Test Online Payment WizardAbdisalan Abdullahi MohamedNo ratings yet
- Make $100 in 10 Minutes: The Easiest Method I Have Ever Seen!Document3 pagesMake $100 in 10 Minutes: The Easiest Method I Have Ever Seen!MudassirNo ratings yet
- LogsDocument905 pagesLogsAbraham GNo ratings yet
- Tut 1 RevDocument10 pagesTut 1 RevDuke GlobalNo ratings yet
- VX WH VU GEn3 Series2 5f WiringDocument2 pagesVX WH VU GEn3 Series2 5f WiringDanniel PizattoNo ratings yet
- Data Sheet CODESYS Control For Raspberry Pi SL: Product DescriptionDocument3 pagesData Sheet CODESYS Control For Raspberry Pi SL: Product Descriptionleon3388No ratings yet
- CS404 Embedded Systems: Eighth Semester B.Tech Degree Supplementary Examination August 2021Document2 pagesCS404 Embedded Systems: Eighth Semester B.Tech Degree Supplementary Examination August 2021Jinu ThomasNo ratings yet
- Katalog Sensor LoraDocument104 pagesKatalog Sensor LoraSeptian danuNo ratings yet
- TUSHAR MANOHAR BHADANE ResumeDocument1 pageTUSHAR MANOHAR BHADANE ResumeKanchan ManhasNo ratings yet
- SMM Panel ProvidersDocument2 pagesSMM Panel ProvidersJustsmo100% (1)
- Made For Science Quanser 2 Dof Serial Flexible Joint UserManualDocument19 pagesMade For Science Quanser 2 Dof Serial Flexible Joint UserManualKevin Sze Pin TanNo ratings yet
- Module 7 Imaging and Design For Social ImpactDocument21 pagesModule 7 Imaging and Design For Social ImpactMae Cedenio - DatoonNo ratings yet
- Live Darshan of Kashi Vishwanath Temple and Shirdi Sai Baba Temple On Your MobileDocument1 pageLive Darshan of Kashi Vishwanath Temple and Shirdi Sai Baba Temple On Your MobileDeepa HNo ratings yet
- Data Sheet For 8254 Programmable Interval TimerDocument16 pagesData Sheet For 8254 Programmable Interval TimerSANJEEV KUMAR KHATRINo ratings yet
- ValveLink VL2000Document176 pagesValveLink VL2000hrtoro100% (1)
- Aveva Clash Manager BrochuresDocument2 pagesAveva Clash Manager BrochuresSalmanNo ratings yet
- Ahmed Mustafa ResumeDocument1 pageAhmed Mustafa ResumehuhhhNo ratings yet
- SunTrust Bank Open UpDocument13 pagesSunTrust Bank Open Upelhard shallo100% (3)