You might also like
- Structural Engineers LTD.: Liverpool Street Station ModernizationDocument2 pagesStructural Engineers LTD.: Liverpool Street Station ModernizationforbeskaNo ratings yet
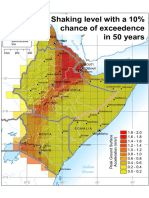
- Analytical grid shows shaking levels in East AfricaDocument1 pageAnalytical grid shows shaking levels in East AfricaWendirad BeshadaNo ratings yet
- Shear Wall Crack FactorDocument188 pagesShear Wall Crack FactorChang Bong100% (1)
- Femap-154 508Document388 pagesFemap-154 508acupatee100% (1)
- Persuasion and Infl Uence in A Climate EmergencyDocument3 pagesPersuasion and Infl Uence in A Climate EmergencyWendirad BeshadaNo ratings yet
- 07 Matrix FrameDocument72 pages07 Matrix FrameAminatul Fadillah MarpaungNo ratings yet
- Ddmmyy ES-EN1992 Concrete-Cover 4.4.1Document3 pagesDdmmyy ES-EN1992 Concrete-Cover 4.4.1Wendirad BeshadaNo ratings yet
- Pioneering The Supertall TowerDocument1 pagePioneering The Supertall TowerErol ArNo ratings yet
- Comparison of EBCS 8 and Others Codes PDFDocument15 pagesComparison of EBCS 8 and Others Codes PDFhemanta_12No ratings yet
- Structural Engineers LTD.: Liverpool Street Station ModernizationDocument2 pagesStructural Engineers LTD.: Liverpool Street Station ModernizationforbeskaNo ratings yet
- Ø 8 C/C 150 Ø 8 C/C 150: 170206 - Stair Slab Reinforcement WenderadeDocument1 pageØ 8 C/C 150 Ø 8 C/C 150: 170206 - Stair Slab Reinforcement WenderadeWendirad BeshadaNo ratings yet
- Boivin Paul Tre 2012 BDocument14 pagesBoivin Paul Tre 2012 BWendirad BeshadaNo ratings yet
- Iceri 2016 Seismocode Stefan & AlDocument9 pagesIceri 2016 Seismocode Stefan & AlWendirad BeshadaNo ratings yet
- Reinforced Concrete Slab Punching Shear StrengthDocument8 pagesReinforced Concrete Slab Punching Shear StrengthRaju ShresthaNo ratings yet
- Reinforced Concrete Slab Punching Shear StrengthDocument8 pagesReinforced Concrete Slab Punching Shear StrengthRaju ShresthaNo ratings yet
- RCC14 Crack WidthDocument6 pagesRCC14 Crack WidthGavriel NgNo ratings yet
- Seismic load calculations for different building levelsDocument2 pagesSeismic load calculations for different building levelsWendirad BeshadaNo ratings yet
- 3 RD - 2nd Basement2Document1 page3 RD - 2nd Basement2Wendirad BeshadaNo ratings yet
- Boivin Paul Tre 2012 BDocument14 pagesBoivin Paul Tre 2012 BWendirad BeshadaNo ratings yet
- Analytical grid shows shaking levels in East AfricaDocument1 pageAnalytical grid shows shaking levels in East AfricaWendirad BeshadaNo ratings yet
- N Axis 1 and 2Document1 pageN Axis 1 and 2Wendirad BeshadaNo ratings yet
- Double InterpolationDocument2 pagesDouble InterpolationWendirad BeshadaNo ratings yet
- The Impact of Deep Foundations of Building Structures On The Neighbouring Buildings A Static AnalysisDocument14 pagesThe Impact of Deep Foundations of Building Structures On The Neighbouring Buildings A Static AnalysisWendirad BeshadaNo ratings yet
- Raft Foundation DesignDocument2 pagesRaft Foundation Designezarul fitri88% (25)
- Joint and slab moment calculations for reinforced concrete structureDocument6 pagesJoint and slab moment calculations for reinforced concrete structureWendirad BeshadaNo ratings yet
- Push Over CurveDocument28 pagesPush Over CurveWendirad BeshadaNo ratings yet
- Design Any Slabs & BeamsDocument18 pagesDesign Any Slabs & BeamsWendirad BeshadaNo ratings yet
- Raft Foundation DesignDocument2 pagesRaft Foundation Designezarul fitri88% (25)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ML AiDocument2 pagesML AiSUYASH SHARTHINo ratings yet
- Retaining Wall-Masonry Design and Calculation SpreadsheetDocument6 pagesRetaining Wall-Masonry Design and Calculation SpreadsheetfarrukhNo ratings yet
- VT6050 VT6010 QuickGuide ENDocument19 pagesVT6050 VT6010 QuickGuide ENPriyank KumarNo ratings yet
- House Designs, QHC, 1950Document50 pagesHouse Designs, QHC, 1950House Histories100% (8)
- Chain Surveying InstrumentsDocument5 pagesChain Surveying InstrumentsSachin RanaNo ratings yet
- Troubleshooting Hydraulic Circuits: Fluid PowerDocument32 pagesTroubleshooting Hydraulic Circuits: Fluid PowerMi LuanaNo ratings yet
- The Simple PendulumDocument5 pagesThe Simple PendulumDexter TorringtonNo ratings yet
- Conjoint Analysis Basic PrincipleDocument16 pagesConjoint Analysis Basic PrinciplePAglu JohnNo ratings yet
- Interactive Architecture Adaptive WorldDocument177 pagesInteractive Architecture Adaptive Worldhoma massihaNo ratings yet
- Fake News Poems by Martin Ott Book PreviewDocument21 pagesFake News Poems by Martin Ott Book PreviewBlazeVOX [books]No ratings yet
- Lesson 2 Socio Anthropological View of The SelfDocument12 pagesLesson 2 Socio Anthropological View of The SelfAilyn RamosNo ratings yet
- Xii Neet Chemistry Mcqs PDFDocument30 pagesXii Neet Chemistry Mcqs PDFMarcus Rashford100% (3)
- 12 Week Heavy Slow Resistance Progression For Patellar TendinopathyDocument4 pages12 Week Heavy Slow Resistance Progression For Patellar TendinopathyHenrique Luís de CarvalhoNo ratings yet
- TIA Selection Tool: Release Notes V2022.05Document10 pagesTIA Selection Tool: Release Notes V2022.05Patil Amol PandurangNo ratings yet
- Background of The Study Statement of ObjectivesDocument4 pagesBackground of The Study Statement of ObjectivesEudelyn MelchorNo ratings yet
- 3D Area Clearance Strategies for Roughing ComponentsDocument6 pages3D Area Clearance Strategies for Roughing ComponentsMohamedHassanNo ratings yet
- SOR 8th Ed 2013Document467 pagesSOR 8th Ed 2013Durgesh Govil100% (3)
- Nikola Tesla Was Murdered by Otto Skorzeny.Document12 pagesNikola Tesla Was Murdered by Otto Skorzeny.Jason Lamb50% (2)
- Mechanical Specifications For Fiberbond ProductDocument8 pagesMechanical Specifications For Fiberbond ProducthasnizaNo ratings yet
- 1.2 - Sewing Machine and Special AttachmentsDocument3 pages1.2 - Sewing Machine and Special Attachmentsmaya_muth0% (1)
- Patent for Fired Heater with Radiant and Convection SectionsDocument11 pagesPatent for Fired Heater with Radiant and Convection Sectionsxyz7890No ratings yet
- Sri Radhakrishna SwamijiDocument43 pagesSri Radhakrishna SwamijiNarayana IyengarNo ratings yet
- 40 26Document3 pages40 26Maxi452No ratings yet
- Brochure Personal CareDocument38 pagesBrochure Personal CarechayanunNo ratings yet
- KAC-8102D/8152D KAC-9102D/9152D: Service ManualDocument18 pagesKAC-8102D/8152D KAC-9102D/9152D: Service ManualGamerAnddsNo ratings yet
- Gotham City: A Study into the Darkness Reveals Dangers WithinDocument13 pagesGotham City: A Study into the Darkness Reveals Dangers WithinajNo ratings yet
- Motor GraderDocument24 pagesMotor GraderRafael OtuboguatiaNo ratings yet
- Features Integration of Differential Binomial: DX BX A X P N MDocument4 pagesFeatures Integration of Differential Binomial: DX BX A X P N Mابو سامرNo ratings yet
- The Apu Trilogy - Robin Wood PDFDocument48 pagesThe Apu Trilogy - Robin Wood PDFSamkush100% (1)
- Placenta Previa Case Study: Adefuin, Jay Rovillos, Noemie MDocument40 pagesPlacenta Previa Case Study: Adefuin, Jay Rovillos, Noemie MMikes CastroNo ratings yet