You might also like
- Magnetic Levitation Data Sheet PDFDocument2 pagesMagnetic Levitation Data Sheet PDFDavid Stiven Rodriguez HerreraNo ratings yet
- Arduino Magnet Levitation GuideDocument7 pagesArduino Magnet Levitation GuidelorenaNo ratings yet
- Electromagnetic suspension and levitation techniquesDocument74 pagesElectromagnetic suspension and levitation techniquesarhtursNo ratings yet
- Ultrasonic Levitation Machine Using Arduino: T He Object Oat SDocument8 pagesUltrasonic Levitation Machine Using Arduino: T He Object Oat SJose A Perez Delgado100% (1)
- Memo FinalDocument61 pagesMemo FinalCryizzle NightbladeNo ratings yet
- WHITEPAPER - Veronica Valeros and Sebastian Garcia - A Modern Study of Microphone BugsDocument14 pagesWHITEPAPER - Veronica Valeros and Sebastian Garcia - A Modern Study of Microphone BugsTina BillingsleyNo ratings yet
- Nanotechnology Prepare To EvolveDocument10 pagesNanotechnology Prepare To EvolveMichelle EwensNo ratings yet
- Application of Magnetic Levitation: Hamid YaghoubiDocument16 pagesApplication of Magnetic Levitation: Hamid YaghoubiLalitSisodiaNo ratings yet
- Balancing RobotDocument5 pagesBalancing RobotMilton MuñozNo ratings yet
- LevitronDocument38 pagesLevitronFatima RubabNo ratings yet
- LabVIEW Design PatternsDocument59 pagesLabVIEW Design PatternsLuis Alberto NegreteNo ratings yet
- Time TravelDocument24 pagesTime TravelAljonReveloCalimpongNo ratings yet
- Quantum Vacuum Plasma Thruster.Document9 pagesQuantum Vacuum Plasma Thruster.justforaspinNo ratings yet
- LevitationDocument4 pagesLevitationJorge CordeiroNo ratings yet
- The Detection of Electromagnetic Processes in The Ionosphere Caused by Seismic ActivityDocument12 pagesThe Detection of Electromagnetic Processes in The Ionosphere Caused by Seismic Activityclaudiocastillo@gmail.comNo ratings yet
- Remote Sensing 2Document64 pagesRemote Sensing 2Yogesh SharmaNo ratings yet
- DNA Teleportation: Nobel Winner's Controversial ExperimentDocument2 pagesDNA Teleportation: Nobel Winner's Controversial Experimentdavid100% (1)
- Japan Solar Power Satellite - Wireless Power Using MicrowavesDocument23 pagesJapan Solar Power Satellite - Wireless Power Using MicrowavesMichael Janitch100% (3)
- GBPPR 'Zine - Issue #62Document76 pagesGBPPR 'Zine - Issue #62GBPPRNo ratings yet
- Schlieren and Shadowgraph Techniques: G. S. SettlesDocument7 pagesSchlieren and Shadowgraph Techniques: G. S. SettlesRaju KaranamNo ratings yet
- All The Mathematics You Missed 16aug2023 Thomas A. GarrityDocument375 pagesAll The Mathematics You Missed 16aug2023 Thomas A. Garrityocorner2000No ratings yet
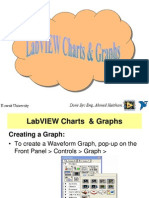
- LabVIEW Charts & GraphsDocument29 pagesLabVIEW Charts & Graphsahmed4665100% (1)
- ARV Alien Reproduction Vehicle ConceptDocument16 pagesARV Alien Reproduction Vehicle ConceptNikoletaNo ratings yet
- Astronomy and Computing: M. Beroiz, J.B. Cabral, B. SanchezDocument8 pagesAstronomy and Computing: M. Beroiz, J.B. Cabral, B. SanchezCarlos Alexis Alvarado Silva100% (1)
- Teleportation Using EVOsDocument1 pageTeleportation Using EVOsesicardi5043No ratings yet
- Radio Direction FinderDocument78 pagesRadio Direction Finderbingwazzup100% (1)
- Spectrum Analysis BasicsDocument89 pagesSpectrum Analysis BasicshygsonNo ratings yet
- Topics in Environmental Physiology and Medicine: Edited Karl E. SchaeferDocument339 pagesTopics in Environmental Physiology and Medicine: Edited Karl E. SchaeferAna GujabidzeNo ratings yet
- Build and Use Small Electric MotorsDocument5 pagesBuild and Use Small Electric MotorsdarkquinkNo ratings yet
- Datasheet 4017Document12 pagesDatasheet 4017Sinaí PerezNo ratings yet
- Acoustic Levitator SimulationDocument14 pagesAcoustic Levitator Simulationca6tik010% (1)
- Compliment To Entire PDFDocument159 pagesCompliment To Entire PDFEzequiel Ezequiel100% (1)
- Wireless ChargingDocument31 pagesWireless ChargingAbhinav Raj100% (1)
- Emergence of 50 HZ FrequencyDocument11 pagesEmergence of 50 HZ Frequencybalu_33babuNo ratings yet
- SpeedtouchmanualDocument100 pagesSpeedtouchmanualjoelNo ratings yet
- Project Hermes - Project Hermes Device (BSR & Tesla)Document10 pagesProject Hermes - Project Hermes Device (BSR & Tesla)cowboyjoe9No ratings yet
- SeminarDocument24 pagesSeminarpraveenpv7100% (2)
- Negative Gravitational MassDocument6 pagesNegative Gravitational MasspaolotrNo ratings yet
- Studying Hawking Radiation Using a Desktop Sonic Black HoleDocument4 pagesStudying Hawking Radiation Using a Desktop Sonic Black HoleadimeghaNo ratings yet
- Wireless Transmission Network: A ImagineDocument4 pagesWireless Transmission Network: A ImagineEditor IJSETNo ratings yet
- A Delayed Choice Quantum EraserDocument4 pagesA Delayed Choice Quantum EraserDavide Morgante100% (1)
- How To Communicate With Parallel PortDocument24 pagesHow To Communicate With Parallel Portahmed4665100% (6)
- Smart Antenna Technologies ResearchDocument1 pageSmart Antenna Technologies ResearchNational Physical LaboratoryNo ratings yet
- Telepresence FinalDocument38 pagesTelepresence FinalVivek VincentNo ratings yet
- Nanotechn Ology: Presented By: Rajat Sardana M. LaxmanDocument32 pagesNanotechn Ology: Presented By: Rajat Sardana M. LaxmanRajatSardanaNo ratings yet
- 4000 Series Ic's ListDocument4 pages4000 Series Ic's ListSyed Zulqadar HassanNo ratings yet
- USNA - Lecture Notes On Underwater AcousticsDocument439 pagesUSNA - Lecture Notes On Underwater AcousticsNvlArchNo ratings yet
- Sonar ThesisDocument156 pagesSonar ThesisPedroNo ratings yet
- PieEconomics - Cavitation Radiation ReplicationDocument26 pagesPieEconomics - Cavitation Radiation ReplicationshizuyeNo ratings yet
- Smart Antenna Full ReportDocument9 pagesSmart Antenna Full ReportPriyanka Kushwaha100% (1)
- C155 PDFDocument6 pagesC155 PDFtortbNo ratings yet
- Acoustic LevitationDocument16 pagesAcoustic LevitationMatt Stephens-Row100% (2)
- Design and Implementation of A Quantum True Random Number GeneratorDocument24 pagesDesign and Implementation of A Quantum True Random Number Generatormercurio11No ratings yet
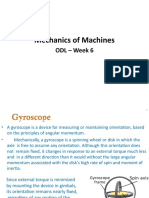
- Mechanics of Machines: ODL - Week 6Document54 pagesMechanics of Machines: ODL - Week 6Faheem AhmadNo ratings yet
- Modeling and Control of An Air Levitation Ball and Pipe Laboratory SetupDocument6 pagesModeling and Control of An Air Levitation Ball and Pipe Laboratory SetupYara KhalidNo ratings yet
- Design of A Low-Cost Air Levitation System For Teaching Control EngineeringDocument18 pagesDesign of A Low-Cost Air Levitation System For Teaching Control EngineeringHernán LaraNo ratings yet
- Online Wind Tunnel Laboratory: June 2008Document20 pagesOnline Wind Tunnel Laboratory: June 2008Ro RohadiNo ratings yet
- Online Wind Tunnel LaboratoryDocument19 pagesOnline Wind Tunnel LaboratorybralghlamaNo ratings yet
- Modeling and Control of An Air Levitation Ball and Pipe Laboratory SetupDocument7 pagesModeling and Control of An Air Levitation Ball and Pipe Laboratory SetupYara KhalidNo ratings yet
- Introduction To Real-Time Control Using Labview With An Application To Distance LearningDocument18 pagesIntroduction To Real-Time Control Using Labview With An Application To Distance LearningMarlon José Do CarmoNo ratings yet
- 10 Reasons I Love YouDocument3 pages10 Reasons I Love YousumlusemloNo ratings yet
- ReadmeDocument3 pagesReadmesumlusemloNo ratings yet
- ReadmeDocument2 pagesReadmesumlusemloNo ratings yet
- Activity No 3: Sampling, Aliasing and Noise: II. ProblemsDocument2 pagesActivity No 3: Sampling, Aliasing and Noise: II. ProblemssumlusemloNo ratings yet
- Activity 1.2 Fuzzy TemperatureRHDocument3 pagesActivity 1.2 Fuzzy TemperatureRHsumlusemloNo ratings yet
- Activity 02Document2 pagesActivity 02sumlusemloNo ratings yet
- Application For Registration As Ecozone Agro-Industrial EnterpriseDocument9 pagesApplication For Registration As Ecozone Agro-Industrial EnterprisesumlusemloNo ratings yet
- Unit 01 Family Life Lesson 1 Getting Started - 2Document39 pagesUnit 01 Family Life Lesson 1 Getting Started - 2Minh Đức NghiêmNo ratings yet
- LAU Paleoart Workbook - 2023Document16 pagesLAU Paleoart Workbook - 2023samuelaguilar990No ratings yet
- Unit Test Nervous System 14.1Document4 pagesUnit Test Nervous System 14.1ArnelNo ratings yet
- Article 106899Document6 pagesArticle 106899Abhinave SNo ratings yet
- Penilaian Risiko Kerja Menggunakan Metode Hirarc Di Pt. Sinar Laut Indah Natar Lampung SelatanDocument7 pagesPenilaian Risiko Kerja Menggunakan Metode Hirarc Di Pt. Sinar Laut Indah Natar Lampung SelatanIndun InsiyahNo ratings yet
- Tos IcuDocument1 pageTos IcuMary Cris RombaoaNo ratings yet
- Haier's Performance Management in Other CulturesDocument8 pagesHaier's Performance Management in Other CulturesSubhransu SahooNo ratings yet
- IBM Credit Corp BPR ProcessDocument8 pagesIBM Credit Corp BPR ProcessAnubhav PuriNo ratings yet
- EDUC 5 - QuestionairesDocument7 pagesEDUC 5 - QuestionairesWilliam RanaraNo ratings yet
- Balzac and the Little Chinese Seamstress: A Journey During the Cultural RevolutionDocument4 pagesBalzac and the Little Chinese Seamstress: A Journey During the Cultural RevolutionRogona 123No ratings yet
- Fancy YarnsDocument7 pagesFancy Yarnsiriarn100% (1)
- Quantitative Aptitude-More Exercise Questions Updated On Jul 2019Document4 pagesQuantitative Aptitude-More Exercise Questions Updated On Jul 2019SANAMGI BHAVYANo ratings yet
- Philippine Politics and Constitution SyllabusDocument7 pagesPhilippine Politics and Constitution SyllabusIvy Karen C. Prado100% (1)
- Book 2 - Test 1Document2 pagesBook 2 - Test 1Đức LongNo ratings yet
- Bibliography PresocraticsDocument10 pagesBibliography Presocraticsalraun66No ratings yet
- Inclusive E-Service or Risk of Digital Divide The Case of National ICT Policy 2018 of BangladeshDocument11 pagesInclusive E-Service or Risk of Digital Divide The Case of National ICT Policy 2018 of BangladeshInternational Journal of Innovative Science and Research Technology100% (1)
- Topographic Map of Blooming GroveDocument1 pageTopographic Map of Blooming GroveHistoricalMapsNo ratings yet
- Hematology NotesDocument3 pagesHematology NotesFarisa Jane BanggoNo ratings yet
- Rha GGBS 27 4Document12 pagesRha GGBS 27 4KhaDeja MawraNo ratings yet
- Scientific Passage English TestDocument57 pagesScientific Passage English TestAb HadiNo ratings yet
- 60Hz Axial-Fan Centrifugal-Fan AC EN (2009) PDFDocument136 pages60Hz Axial-Fan Centrifugal-Fan AC EN (2009) PDFRodrigo GonçalvesNo ratings yet
- Absolute Value - WikipediaDocument10 pagesAbsolute Value - WikipediaVenu GopalNo ratings yet
- Albert PikeDocument6 pagesAlbert Pikeapi-302575383No ratings yet
- How To Use Hyper-V Snapshot Revert, Apply, and Delete OptionsDocument15 pagesHow To Use Hyper-V Snapshot Revert, Apply, and Delete OptionsKaran MishraNo ratings yet
- New Microwave Lab ManualDocument35 pagesNew Microwave Lab ManualRadhikaNo ratings yet
- Frozen DessertDocument3 pagesFrozen DessertcsqueilNo ratings yet
- DelhiDocument40 pagesDelhiRahul DharNo ratings yet
- Design Process at LEGODocument5 pagesDesign Process at LEGOkapsarcNo ratings yet
- Antenatal AssessmentDocument9 pagesAntenatal Assessmentjyoti singhNo ratings yet
- CELTA Pre-Interview Grammar, Vocabulary and Pronunciation ExercisesDocument4 pagesCELTA Pre-Interview Grammar, Vocabulary and Pronunciation ExercisesMichelJorge100% (2)