You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Evolve - L6 - Unit 1 Quiz - BDocument3 pagesEvolve - L6 - Unit 1 Quiz - BMarcos TadeuNo ratings yet
- What Caused Tower Malfunctions in The Last 50 Years-Henry KisterDocument22 pagesWhat Caused Tower Malfunctions in The Last 50 Years-Henry KisterrakeshNo ratings yet
- Application of Digital Twin TechnologyDocument41 pagesApplication of Digital Twin TechnologyHemn Rafiq TofiqNo ratings yet
- Updating the Chemical Engineering Plant Cost Index for the 21st CenturyDocument9 pagesUpdating the Chemical Engineering Plant Cost Index for the 21st CenturyChelsea SkinnerNo ratings yet
- SPT2013 BioExt AAM PDFDocument21 pagesSPT2013 BioExt AAM PDFAdrian Villegas BarrientosNo ratings yet
- The Quanti Cation of Citral in Lemongrass and Lemon Oils by Near-Infrared SpectrosDocument7 pagesThe Quanti Cation of Citral in Lemongrass and Lemon Oils by Near-Infrared SpectrosAdrian Villegas BarrientosNo ratings yet
- 10 10 15Document115 pages10 10 15Meena VelayuthamNo ratings yet
- Thermodynamic Properties, Equations of State, Methods Used To Describe and Predict Phase EquilibriaDocument20 pagesThermodynamic Properties, Equations of State, Methods Used To Describe and Predict Phase EquilibriaanisfathimaNo ratings yet
- 21EI44 - Linear Control Systems - SyllabusDocument4 pages21EI44 - Linear Control Systems - Syllabuskrushnasamy subramaniyanNo ratings yet
- Babok (Business Analysis Body of Knowledge)Document10 pagesBabok (Business Analysis Body of Knowledge)Keyur KhoontNo ratings yet
- FSC ProjectDocument9 pagesFSC ProjectAnonymous 91hJec40rHNo ratings yet
- MLOps Masterclass November 2023Document16 pagesMLOps Masterclass November 2023Ferie De La PeñaNo ratings yet
- Robot Modeling and Control: Graduate Course at Automatic Control Mikael NorrlöfDocument10 pagesRobot Modeling and Control: Graduate Course at Automatic Control Mikael NorrlöfMeryem MimiNo ratings yet
- Artificial Intelligence FoundationsDocument96 pagesArtificial Intelligence FoundationsGunjan SumanNo ratings yet
- Lecture 15 Steady-State Error For Unity Feedback SystemDocument28 pagesLecture 15 Steady-State Error For Unity Feedback SystemRammay Sb100% (1)
- Control System Engineering 2 MarksDocument18 pagesControl System Engineering 2 MarksSeenu CnuNo ratings yet
- Curriculum - Vitae - Format (1) Rafael NuñezDocument3 pagesCurriculum - Vitae - Format (1) Rafael NuñezRafael NuñezNo ratings yet
- AIChE - 2014 - Paper - 24A - Lambda Tuning Methods For Level and Other Integrating Processes-BDocument35 pagesAIChE - 2014 - Paper - 24A - Lambda Tuning Methods For Level and Other Integrating Processes-BscongiundiNo ratings yet
- Food Web - Wikipedia PDFDocument4 pagesFood Web - Wikipedia PDFNadja SoleilNo ratings yet
- 2151705 (2)Document3 pages2151705 (2)Maulik MulaniNo ratings yet
- Tutorial 4 Time ResponseDocument8 pagesTutorial 4 Time ResponseTam PhamNo ratings yet
- Artificialintelligencereport 130426220342 Phpapp01Document30 pagesArtificialintelligencereport 130426220342 Phpapp01AIVaibhav GhubadeNo ratings yet
- Thermodynamics of Irreversible Processes Lecture NotesDocument10 pagesThermodynamics of Irreversible Processes Lecture NotesNatty LopezNo ratings yet
- Importance of Programming For Industrial EngineeringDocument2 pagesImportance of Programming For Industrial EngineeringTati GarcíaNo ratings yet
- 36-Article Text-66-1-10-20230102Document10 pages36-Article Text-66-1-10-20230102M Luthfi Al MudzakiNo ratings yet
- SDLC OoseDocument36 pagesSDLC OoseAnsh AnuragNo ratings yet
- Chapter 3 - ContentsDocument8 pagesChapter 3 - ContentsSaiful MunirNo ratings yet
- Beyond ERP: Towards Intelligent Manufacturing Planning and ControlDocument49 pagesBeyond ERP: Towards Intelligent Manufacturing Planning and ControldedikiNo ratings yet
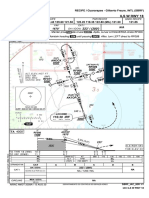
- ILS W RWY 18 Approach Chart for RECIFE / Guararapes - Gilberto Freyre, INTL (SBRFDocument1 pageILS W RWY 18 Approach Chart for RECIFE / Guararapes - Gilberto Freyre, INTL (SBRFRicardo PalermoNo ratings yet
- Systems Development Life Cycle (SDLC)Document45 pagesSystems Development Life Cycle (SDLC)javauaNo ratings yet
- ANN ControlDocument6 pagesANN ControlLissete VergaraNo ratings yet
- t8 - Behavioural ModellingDocument56 pagest8 - Behavioural ModellingNazeyra JamalNo ratings yet
- WameedMUCLecture 2021 9216267Document24 pagesWameedMUCLecture 2021 9216267Ayman OmarNo ratings yet
- M.Tech I Mid QPDocument2 pagesM.Tech I Mid QPsree bvritNo ratings yet