You might also like
- Prototyping PresentationDocument27 pagesPrototyping PresentationKishan KumarNo ratings yet
- ADAS research framework for advanced driver assistanceDocument8 pagesADAS research framework for advanced driver assistanceherusyahputraNo ratings yet
- Combination of Advanced Robotics and Computer Vision For Shelf Analytics in A Retail StoreDocument6 pagesCombination of Advanced Robotics and Computer Vision For Shelf Analytics in A Retail StoreGaby HayekNo ratings yet
- Driver Drowsiness Detection System Using Image Processing and IR Sensing MechanismDocument8 pagesDriver Drowsiness Detection System Using Image Processing and IR Sensing MechanismgigatekNo ratings yet
- I&M Lab ManualDocument20 pagesI&M Lab ManualSaad MalikNo ratings yet
- Development of Real-Time Object Identification and Tracking SystemDocument25 pagesDevelopment of Real-Time Object Identification and Tracking SystemMuhammad ImranNo ratings yet
- Object Tracking For Autonomous Vehicles: Project ReportDocument12 pagesObject Tracking For Autonomous Vehicles: Project ReportFIRE OC GAMINGNo ratings yet
- Easy Ai: Techgig Code Gladiators 2019Document15 pagesEasy Ai: Techgig Code Gladiators 2019Vidhi ThakkarNo ratings yet
- Sarix IME Indoor and Environmental Mini Domes: Product SpecificationDocument6 pagesSarix IME Indoor and Environmental Mini Domes: Product SpecificationElvis Richard Barrera RomanNo ratings yet
- Agile Real Time QuetionsDocument8 pagesAgile Real Time Quetionsshubhamshedge8No ratings yet
- Vision Assisted Pick and Place Robotic Arm Guided by Image Processing Concepts For Object Sorting SystemDocument28 pagesVision Assisted Pick and Place Robotic Arm Guided by Image Processing Concepts For Object Sorting SystemmanjunathaNo ratings yet
- Projectgroup 1Document5 pagesProjectgroup 1Abdulazeez BelloNo ratings yet
- IDE20 Series Sarix IP Indoor Fixed Dome: Product SpecificationDocument6 pagesIDE20 Series Sarix IP Indoor Fixed Dome: Product Specificationgat_leeNo ratings yet
- INTENSHIPDocument22 pagesINTENSHIPjagadeesh jaggiNo ratings yet
- Easy AI TechGig Code Gladiators 2019 Parking Lot ManagementDocument15 pagesEasy AI TechGig Code Gladiators 2019 Parking Lot ManagementVidhi ThakkarNo ratings yet
- AI-Car Detection: Gandhinagar Institute of TechnolgyDocument18 pagesAI-Car Detection: Gandhinagar Institute of TechnolgySAVALIYA FENNYNo ratings yet
- Automated Guided Vehicle: Submitted in Partial Fulfillment of The Requirements For The Award of The DegreeDocument15 pagesAutomated Guided Vehicle: Submitted in Partial Fulfillment of The Requirements For The Award of The DegreesurajNo ratings yet
- Gaze Controlled Gun: AbstractDocument3 pagesGaze Controlled Gun: AbstracterpublicationNo ratings yet
- Object Tracking For Autonomous Vehicles: Project ReportDocument10 pagesObject Tracking For Autonomous Vehicles: Project ReportFIRE OC GAMINGNo ratings yet
- Lane DetectionDocument11 pagesLane DetectioniqraNo ratings yet
- 9851 3260 01 - LDocument8 pages9851 3260 01 - LFabian Morquecho100% (1)
- Pick and Place Robot Literature ReviewDocument8 pagesPick and Place Robot Literature Reviewnydohavihup2100% (1)
- Metrics For Agile Projects: Presented at Agile NCR 2008 Conference (March 8, 08) by Deepak MittalDocument48 pagesMetrics For Agile Projects: Presented at Agile NCR 2008 Conference (March 8, 08) by Deepak MittalSwamianidu PadalaNo ratings yet
- Product Stock Management Using Computer VisionDocument6 pagesProduct Stock Management Using Computer Visioncaio.tertulianoNo ratings yet
- FinalDocument33 pagesFinalanushaNo ratings yet
- Ceva SolutieDocument39 pagesCeva SolutieAlexandru StefanNo ratings yet
- Vehicle DCCDocument12 pagesVehicle DCCSumukheshGuptaNo ratings yet
- Face Recognition Based Attendance SystemDocument11 pagesFace Recognition Based Attendance SystemRajan ThakurNo ratings yet
- Automatic intrinsic and extrinsic calibration of multiple generic cameras and odometryDocument9 pagesAutomatic intrinsic and extrinsic calibration of multiple generic cameras and odometryherusyahputraNo ratings yet
- DV04PUB11 Study GuideDocument5 pagesDV04PUB11 Study GuidetharNo ratings yet
- 56.eye Ball Cursor Movement Using OpencvDocument4 pages56.eye Ball Cursor Movement Using OpencvAarthi SinghNo ratings yet
- Start & Stop Conveyor with IR SensorDocument14 pagesStart & Stop Conveyor with IR SensorThierry LAMBOTTENo ratings yet
- Robot Vision: Automating Automation With Machine VisionDocument8 pagesRobot Vision: Automating Automation With Machine Visionshehan2008No ratings yet
- Computer Vision Module Application For Finding A Target in A Live CameraDocument8 pagesComputer Vision Module Application For Finding A Target in A Live CameraGopi KrishnaNo ratings yet
- HackFest 23 Concept Submission TemplateDocument12 pagesHackFest 23 Concept Submission TemplateBARATH PNo ratings yet
- Waterfall model, Prototyping model, Agile development model comparisonDocument8 pagesWaterfall model, Prototyping model, Agile development model comparisonGUCI NKCNo ratings yet
- Android Project ReportDocument10 pagesAndroid Project ReportSunil KumarNo ratings yet
- Angular 13 Advanced - Build Professional AppsDocument5 pagesAngular 13 Advanced - Build Professional AppsyogNo ratings yet
- FabImage Studio Review of Example ApplicationsDocument14 pagesFabImage Studio Review of Example Applicationstamas nyNo ratings yet
- Software Crisis and Development Models AnalyzedDocument20 pagesSoftware Crisis and Development Models AnalyzedCärl SeniramacNo ratings yet
- Stereo Depth EstimationDocument3 pagesStereo Depth EstimationAyonabha ChandraNo ratings yet
- Scanning User GuideDocument24 pagesScanning User GuideMarissa DavisNo ratings yet
- Design and Manage an IP Phone SystemDocument12 pagesDesign and Manage an IP Phone SystemharryNo ratings yet
- Smart Webcam: Click To Edit Master Title StyleDocument28 pagesSmart Webcam: Click To Edit Master Title Styleprem sagar kushwahaNo ratings yet
- Research PaperDocument7 pagesResearch PaperFaizan SalimNo ratings yet
- Document 4Document4 pagesDocument 4Faiyaz KhanNo ratings yet
- Pick and Place Robotic Arm Literature ReviewDocument4 pagesPick and Place Robotic Arm Literature Reviewea9k5d7j100% (1)
- Interview QuestionsDocument155 pagesInterview Questionspravallika vysyaraju100% (9)
- SDLC Stages & Models: Waterfall, Incremental, Prototype, Evolutionary & SpiralDocument14 pagesSDLC Stages & Models: Waterfall, Incremental, Prototype, Evolutionary & SpiralHimanshu AggarwalNo ratings yet
- Real Time Object Detection & Tracking with Rotating CameraDocument7 pagesReal Time Object Detection & Tracking with Rotating CameraARif HakimNo ratings yet
- 4314 Assignment 1 Presentation 5Document16 pages4314 Assignment 1 Presentation 5api-723823461No ratings yet
- Lesson - 03 - Angular 4 FeaturesDocument28 pagesLesson - 03 - Angular 4 FeaturesreshmaitagiNo ratings yet
- Machine Vision Is The Technology To Replace or Complement Manual InspectionsDocument48 pagesMachine Vision Is The Technology To Replace or Complement Manual InspectionsRahul SaraswatNo ratings yet
- How Scrum and Kanban frameworks are usedDocument4 pagesHow Scrum and Kanban frameworks are usedACCELIA S 21CSMENo ratings yet
- Manufactura FlexibleDocument17 pagesManufactura FlexibleLuceroNo ratings yet
- Sap WMDocument6 pagesSap WMAkhil MehtaNo ratings yet
- Object DetectionDocument13 pagesObject DetectionAbhishek NaikNo ratings yet
- Min/Max Multiple Traveling Salesmen Problem: Modified GA With A 2-Opt MutationDocument14 pagesMin/Max Multiple Traveling Salesmen Problem: Modified GA With A 2-Opt Mutation901341682jrNo ratings yet
- Thermal Analysis of Computer Motherboards using Digital Holographic InterferometryDocument1 pageThermal Analysis of Computer Motherboards using Digital Holographic InterferometryBoby ThomasNo ratings yet
- Function Practice QuestionsDocument16 pagesFunction Practice QuestionsV DharshiniNo ratings yet
- Huang 2015Document26 pagesHuang 2015IfaNo ratings yet
- QM-Data 200 Operation Guide A4Document0 pagesQM-Data 200 Operation Guide A4Ana Gabriela OjedaNo ratings yet
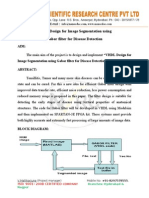
- VHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionDocument3 pagesVHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionNsrc Nano ScientifcNo ratings yet
- Map of Cascade Head RegionDocument1 pageMap of Cascade Head RegionStatesman JournalNo ratings yet
- Beatmaker 3 User Manual: Revision: 3.0.10Document112 pagesBeatmaker 3 User Manual: Revision: 3.0.10artutoNo ratings yet
- Eoffice TrainingDocument28 pagesEoffice TraininganantNo ratings yet
- Switching Theory and Logic DesignDocument2 pagesSwitching Theory and Logic DesignManjunath BadigerNo ratings yet
- Office365 Vs GoogleAppsDocument5 pagesOffice365 Vs GoogleAppssubinsonNo ratings yet
- N FN DJFF NJ FKF HFDF KFH KDJFH Ehru U FHF SDFH Sduf H Eifdhsf DSFJKDSSDKF DSJDocument6 pagesN FN DJFF NJ FKF HFDF KFH KDJFH Ehru U FHF SDFH Sduf H Eifdhsf DSFJKDSSDKF DSJzuritovNo ratings yet
- Kpi RNC LevelDocument24 pagesKpi RNC LevelIan Juanda MarboenNo ratings yet
- Mega GRC 3.2 en - Audit User GuideDocument52 pagesMega GRC 3.2 en - Audit User Guidedorin_irNo ratings yet
- Step 1 - Setup Paypal AccountDocument10 pagesStep 1 - Setup Paypal AccountKanagasabai SaravananNo ratings yet
- CandidateHallTicket PDFDocument2 pagesCandidateHallTicket PDFHimanshu GuptaNo ratings yet
- Huawei Technologies Co., LTDDocument8 pagesHuawei Technologies Co., LTDAgung AndikaNo ratings yet
- Asm To VHDL State Machines: 0Document11 pagesAsm To VHDL State Machines: 0ssfofoNo ratings yet
- Game Engine Programming 1 Game PlatformDocument8 pagesGame Engine Programming 1 Game PlatformJayNo ratings yet
- Nokia C2-01 RM-721 722 Service Schematics v1.0Document7 pagesNokia C2-01 RM-721 722 Service Schematics v1.0Victor ValerioNo ratings yet
- For Microsoft: Lexis Office Tip Sheet-Check Cite FormatDocument2 pagesFor Microsoft: Lexis Office Tip Sheet-Check Cite FormatMehboob UsmanNo ratings yet
- 3D CommandsDocument53 pages3D Commandsmaureen mae mana-ayNo ratings yet
- The Following Code Snippet Is Implemented For The: Function Diff - Actfun (Self, Z, Type)Document2 pagesThe Following Code Snippet Is Implemented For The: Function Diff - Actfun (Self, Z, Type)saheb_juNo ratings yet
- How To Write A Good ReportDocument6 pagesHow To Write A Good Reportapi-3728125100% (1)
- PLSQLLLLLLLLLLLLLDocument41 pagesPLSQLLLLLLLLLLLLLSudheer NaiduNo ratings yet
- Setupapi AppDocument25 pagesSetupapi AppRsam SamrNo ratings yet
- Xappo FacuateDocument3 pagesXappo FacuateKhushboo DurkiyaNo ratings yet
- Hangman DocumentationDocument2 pagesHangman DocumentationMarjorieFrancesCruz0% (1)
- General Testing PrinciplesDocument21 pagesGeneral Testing PrinciplesDhirajlal ChawadaNo ratings yet