You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Thermal Performance Evaluation of Carbon Based Material For A Computer Heat Sink Using Finite Element AnalysisDocument137 pagesThermal Performance Evaluation of Carbon Based Material For A Computer Heat Sink Using Finite Element AnalysisLee Anthony ChingNo ratings yet
- Xi-1152/94 X-Array Install: Two-Way, Full-Range, Sound-Reinforcement SystemDocument8 pagesXi-1152/94 X-Array Install: Two-Way, Full-Range, Sound-Reinforcement SystemIndrek AarelaidNo ratings yet
- WEG CFW500 User Manual 10001278006 enDocument185 pagesWEG CFW500 User Manual 10001278006 enCarlos Abel Riaño PiñareteNo ratings yet
- Lab MicroDocument5 pagesLab MicroNashitah AlwazNo ratings yet
- 2017 LGInnotek CCTV Catg ENG 0406-2Document28 pages2017 LGInnotek CCTV Catg ENG 0406-2JamalSultanNo ratings yet
- Computer Hardware EssentialsDocument14 pagesComputer Hardware EssentialsShamsher KhanNo ratings yet
- Clock DividerDocument18 pagesClock Dividergreeshma nNo ratings yet
- APX MPX GeneratorDocument2 pagesAPX MPX Generatorjohnny chanNo ratings yet
- Emi QuestDocument8 pagesEmi Questhanshi123No ratings yet
- Reversible LogicDocument4 pagesReversible LogicAbhinand SkNo ratings yet
- MCM Controller PDFDocument2 pagesMCM Controller PDFBangesweNo ratings yet
- Mx3ipg2a PDFDocument2 pagesMx3ipg2a PDFhieudaininhNo ratings yet
- Cisco Model EPC3925 8x4 EuroDOCSIS 3.0Document3 pagesCisco Model EPC3925 8x4 EuroDOCSIS 3.0irfaneng76No ratings yet
- IRRInet ACEDocument2 pagesIRRInet ACEmohan niagaraNo ratings yet
- Presentation by Syed Sajjad MuhiyuddinDocument22 pagesPresentation by Syed Sajjad MuhiyuddinMasude KhalidNo ratings yet
- Gericom Laptop Motherboard Schematic DiagramDocument40 pagesGericom Laptop Motherboard Schematic DiagramHenrik ElmNo ratings yet
- Lanre OdutolaDocument2 pagesLanre Odutolafabiogbe@yahoo.com.brNo ratings yet
- Decoder and Encoder Circuits ExplainedDocument25 pagesDecoder and Encoder Circuits ExplainedMAHESHWARAN .A ANo ratings yet
- Manual Intel D865GVHZ PDFDocument19 pagesManual Intel D865GVHZ PDFpedrojuanNo ratings yet
- 056 7100Document54 pages056 7100GustavoLopezGuardado50% (4)
- Aurora SonataDocument336 pagesAurora Sonatapepe perezNo ratings yet
- B.Tech. ECE-IE Syllabus SRM IST - 2018 Reg.Document124 pagesB.Tech. ECE-IE Syllabus SRM IST - 2018 Reg.Ss StNo ratings yet
- 775Twins-HDTV User ManualDocument43 pages775Twins-HDTV User ManualHerodotoNo ratings yet
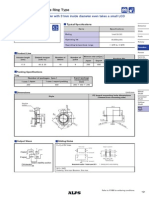
- 50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDDocument3 pages50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDshyhuNo ratings yet
- Lesson 2 - Types of Digital DevicesDocument13 pagesLesson 2 - Types of Digital Devicesaarav aroraNo ratings yet
- Sucursal Colón Quito Sucursal Sur Quito Centro de Servicios Técnicos Sucursal Mayor Guayaquil Sucursal Sur Guayaquil Principal QuitoDocument6 pagesSucursal Colón Quito Sucursal Sur Quito Centro de Servicios Técnicos Sucursal Mayor Guayaquil Sucursal Sur Guayaquil Principal QuitoTamara SuconotaNo ratings yet
- 1506706321657Document76 pages1506706321657Aisa HambaliNo ratings yet
- One Cell Lithium-ion Battery Protection ICDocument12 pagesOne Cell Lithium-ion Battery Protection ICHeraclio Camacho UlloaNo ratings yet
- User Manual - BOYALINKDocument20 pagesUser Manual - BOYALINKCATEDRA DEPORTIVA TINGO MARIANo ratings yet
- Basic Electronics Practive Assignment Diode1Document2 pagesBasic Electronics Practive Assignment Diode1YASHNo ratings yet